1.本实用新型涉及移动机器人导航技术领域,尤其涉及一种通用型移动机器人导航系统。
背景技术:
2.近年来随着机器人性能的不断完善,移动机器人在物流搬运、分拣、无人泊车、安防巡逻、服务等领域中得到了广泛的应用。机器人的发展给人们的生产、生活带来极大的方便。而为机器人移动提供的导航技术涉及环境感知、自主定位、决策与规划、运动控制等方面,是移动机器人领域的核心技术,直接影响机器人的效率和可靠性,所以,为提升移动机器人的实际应用性能,对机器人导航技术的研究,具有十分重要意义。现有的移动机器人导航系统一般是针对某一特定类型的场景,或者某一特定结构的机器人,应用范围相对有限。
技术实现要素:
3.本实用新型所解决的技术问题在于提供一种通用型移动机器人导航系统,以解决上述背景技术中的问题。
4.本实用新型所解决的技术问题采用以下技术方案来实现:
5.一种通用型移动机器人导航系统,包括上位机、下位机及路由器,其中,所述上位机通过自带无线wifi与路由器连接,所述下位机与路由器连接;且所述上位机由用户随身携带或置放在规定位置,以实现人机交互和远程监护功能,所述下位机与路由器安装在移动机器人本体内,与机器人一起运动;用户通过上位机向下位机发送指令,同时可以监控移动机器人的位置、状态,当出现紧急状况时,用户可以通过上位机介入下位机系统,避免危险事故的发生。
6.在本实用新型中,所述上位机为pc平板电脑,并在pc平板电脑内安装有windows系统与ros内核,显示器带触屏功能,且在pc平板电脑内设置有人机交互模块,通过触屏进行人机交互:
7.传感器选择与配置:根据具体应用场景选择合适的定位传感器,对所选传感器的属性进行配置后,生成传感器配置文件,并发送给下位机;
8.运动模型选择与配置:根据移动机器人的结构和驱动方式,选择对应的运动模型,对所选择的运动模型参数进行设置后,生成运动模型配置文件,并发送给下位机;
9.导航算法选择与配置:用户根据需求选择需要用的路径规划算法、路径跟随算法和避障算法,设置所选算法参数后,生成算法配置文件,并发送给下位机;
10.远程监控界面:显示导航地图、机器人实时位置、目标点位置、导航路径;
11.远程操作界面:发送导航过程中的各个命令给下位机;
12.远程加卸载界面:将上位机生成的配置文件传输给下位机,同时可将下位机的文件拷贝至上位机。
13.在本实用新型中,所述下位机为一台设置有多种接口的工控机,支持连接不同类
型的传感器,工控机内安装有linux系统与ros系统,下位机内设置的功能模块包括定位模块、决策模块、运动控制模块及通讯模块,功能模块以ros堆的形式存在,且功能模块中不同算法以ros功能包的形式存在,功能模块为统一接口,各个功能包之间以消息形式通过发布订阅通讯。
14.定位模块包括激光、gps、stargazer等常用定位传感器,用于获取机器人的位置信息;
15.决策模块包括路径规划算法、路径跟踪算法及避障算法;决策模块订阅定位模块发布的移动机器人实时位置信息及上位机发布的目标点位置信息,利用路径规划算法规划一条从当前位置到达目标点的可行路径,并通过路径跟随算法控制移动机器人沿全局路径运动,再由避障算法控制移动机器人在遇到障碍物时能绕开障碍物回到全局路径,同时将算法解算出的速度指令以消息形式发布;
16.运动控制模块包括两轮差速、阿克曼、全向运动等常用的移动机器人运动学模型,运动控制模块订阅决策模块发布的速度指令,通过运动学模型将其解算为移动机器人车轮具体转速;
17.通讯模块,用于监听上位机发送的配置文件,并对配置文件进行解析后,生成下位机可识别的启动文件,下位机通过启动文件启动用户所选择的相应的功能包,并通过启动文件输入相关算法的参数,从而完成不同环境下的导航功能;用户通过远程操作界面向下位机发送导航指令,由远程监控界面实时监控移动机器人的位置、状态,当出现紧急状况时,用户可以通过上位机介入下位机,避免危险事故的发生。
18.有益效果:本实用新型具有模块化、分布式的特点,且功能模块的接口统一,支持用户在此架构上添加新的算法或功能模块;同时用户可以根据具体应用场景和机器人模型,通过触屏选取合适的传感器、导航所需的算法和运动学模型,配置相关参数,以实现不同场景下的导航功能,且能够通过上位机实现对机器人的远程操作和远程监控,应用范围广泛,适用室内、室外等不同工作环境及两驱、四驱、全向移动等不同模型的机器人。
附图说明
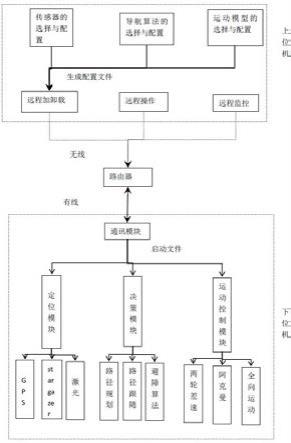
19.图1为本实用新型的较佳实施例的结构示意图。
具体实施方式
20.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
21.参见图1的一种通用型移动机器人导航系统,包括上位机、下位机及路由器,其中,所述上位机通过自带的无线wifi与路由器连接,所述下位机通过网线与路由器连接;且所述上位机由用户随身携带或置放在某个特定位置,以实现人机交互和远程监护功能,所述下位机与路由器安装在移动机器人本体内,与机器人一起运动;用户通过上位机向下位机发送指令,同时可以监控移动机器人的位置、状态,当出现紧急状况时,用户可以通过上位机介入下位机系统,避免危险事故的发生;
22.所述上位机为pc平板电脑,并在pc平板电脑内安装有windows系统与ros内核,显示器带触屏功能,且在pc平板电脑内设置有人机交互模块,通过触屏进行人机交互:
23.传感器选择与配置:根据具体应用场景选择合适的定位传感器,对所选传感器的属性进行配置后,生成传感器配置文件,并发送给下位机;
24.运动模型选择与配置:根据移动机器人的结构和驱动方式,选择对应的运动模型,对所选择的运动模型参数进行设置后,生成运动模型配置文件,并发送给下位机;
25.导航算法选择与配置:用户根据需求选择需要用的路径规划算法、路径跟随算法和避障算法,设置所选算法参数后,生成算法配置文件,并发送给下位机;
26.远程监控界面:显示导航地图、机器人实时位置、目标点位置、导航路径;
27.远程操作界面:发送导航过程中的各个命令给下位机;
28.远程加卸载界面:将上位机生成的配置文件传输给下位机,同时可将下位机的文件拷贝至上位机;
29.所述下位机为一台设置有多种接口的工控机,支持连接不同类型的传感器,工控机内安装有linux系统与ros系统,下位机内设置的功能模块包括定位模块、决策模块、运动控制模块及通讯模块,功能模块以ros堆的形式存在,且功能模块中不同算法以ros功能包的形式存在,功能模块中不同算法采用统一接口,各个功能包之间以消息形式通过发布订阅通讯。
30.定位模块包括激光、gps、stargazer等常用定位传感器,用于获取机器人的位置信息;
31.决策模块包括路径规划算法、路径跟踪算法及避障算法;决策模块订阅定位模块发布的移动机器人实时位置信息及上位机发布的目标点位置信息,利用路径规划算法规划一条从当前位置到达目标点的可行路径,并通过路径跟随算法控制移动机器人沿全局路径运动,再由避障算法控制移动机器人在遇到障碍物时能绕开障碍物回到全局路径,同时将算法解算出的速度指令以消息形式发布;
32.运动控制模块包括两轮差速、阿克曼、全向运动等常用的移动机器人运动学模型,运动控制模块订阅决策模块发布的速度指令,通过运动学模型将其解算为移动机器人车轮具体转速;
33.通讯模块,用于监听上位机发送的配置文件,并对配置文件进行解析后,生成下位机可识别的启动文件,下位机通过启动文件启动用户所选择的相应的功能包,并通过启动文件输入相关算法的参数,从而完成不同环境下的导航功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

