智能物流用基于标识带识别agv无人导航系统及其导航方法
技术领域
1.本发明涉及一种智能物流用基于标识带识别agv无人导航系统。
背景技术:
2.目前的agv小车导航方式可分为直接坐标导航和全局地图导航两种方式,其中直接坐标导航包括如磁条导航、二维码识别导航以及rfid识别导航等方式,其通过在agv小车运行线路上设置固定的参照物,利用agv小车上的识别模块对参照物进行识别从而实现对agv小车的导航;此类导航方式中agv小车的运行线路固定,如需增加或更改agv小车运行线路,需要对运行线路上的参照物位置进行变更,不便于线路的更改,灵活性较差;全局地图导航是利用agv小车上的传感器对其运行轨迹周边环境进行感知,并利用slam算法构建周边环境的全局地图,在全局地图的基础上进行自主导航;此类导航方式无需设置固定参照物,agv小车在运行过程中可以根据全局地图进行自主导航,运行线路根据周边环境实时调整,具有良好的避障和路径优化能力,运行灵活效率高,但是由于环境的复杂性,使得其控制复杂和成本较高。
技术实现要素:
3.本发明的目的在于克服以上所述的缺点,提供一种智能物流用基于标识带识别agv无人导航系统。
4.为实现上述目的,本发明的具体方案如下:一种智能物流用基于标识带识别agv无人导航系统,包括多个相互垂直交叉均布在地面上的横向标识带和纵向标识带,以及可自主导航的agv小车;所述横向标识带和纵向标识带将地面分割为若干个网格区域;所述横向标识带和纵向标识带均为直角梯形结构,所述横向标识带与纵向标识带的颜色不同,所述横向标识带和纵向标识带的斜边与其直角边的颜色均不相同;所述agv小车包括车体、扫描机构、两个激光发射单元、图像处理单元、中央控制单元;所述两个激光发射单元分别对应固定安装于车体底部的长宽两个方向位置,且分别对应可在车体下方的地面上投射出线状激光束;所述扫描机构设于车体底部的中心,并用于对地面上的横向标识带、纵向标识带、线状激光束进行拍摄得到照片,并将所述照片传输至图像处理单元,且所述两个激光发射单元位于扫描机构的扫描范围内;所述图像处理单元存储有坐标函数,并用于对所述照片分析处理;所述分析处理包括识别线状激光束与横向标识带或纵向标识带的相交位置,识别线状激光束之间的相交点,识别所述相交点与所述相交位置的位置关系,并测量出所述相交点沿光线路径至横向标识带或纵向标识带的长度、线状激光束被横向标识带或纵向标识带所截取的长度、以及线状激光束与横向标识带或纵向标识带的直角边的夹角,通过坐标函数计算得出agv小车中心的坐标值以及agv小车的姿态信息;所述中央控制单元用于根据所述坐标值和所述姿态信息计算出最优路径以及控制agv小车沿着最优路径行驶;其中,所述位置关系包括所述相交点位于所述相交位置的
上侧、下侧、右侧或左侧,所述姿态信息包括agv小车的车头朝向、agv小车的车头向左偏、agv小车的车头向右偏。
5.本发明进一步地,所述扫描机构包括扫描电机、直线电机、两个滑动块、长焦镜头和广角镜头;所述扫描电机固定在车体底部的中心,所述直线电机连接在扫描电机的输出端上,所述两个滑动块对应连接在直线电机的输出端上,所述长焦镜头和广角镜头分别对应安装在两个滑动块上。
6.本发明进一步地,所述车体的前后左右四个方向分别一一对应设置有摄像测距单元;所述摄像测距单元包括有用于对障碍物进行拍摄的摄像头以及用于探测摄像测距单元与障碍物距离的超声波距离传感器。
7.本发明进一步地,所述agv小车还包括有用于进行即时交互通信的通讯模块。
8.本发明进一步地,所述图像处理单元还用于对横向标识带与纵向标识带交汇处形成的四边形区域进行轮廓提取和特征分析;所述中央控制单元设有与四边形区域一一对应的坐标值数据库。
9.本发明进一步地,所述两个激光发射单元的线状激光束在地面上的交汇点与车体的中心在地面上的投影重合。
10.本发明的有益效果为:本发明利用在地面上铺设截面呈直角梯形的横向标识带和纵向标识带成型坐标网,并利用agv小车上的激光发射单元在地面上发射出线状激光束,从而通过图像处理单元进行视觉识别并调用对应的坐标函数而得出agv小车的坐标值,以及通过视觉识别激光发射单元的位置和标识带的宽度延伸方向而判断出agv小车的姿态信息,从而在中央控制单元的控制下沿最优路径行驶,实现agv小车的智能导航,具有控制灵活、简单、成本低的特点。
附图说明
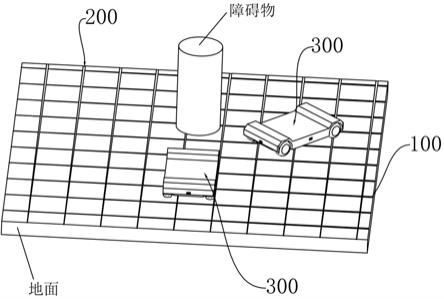
11.图1是本发明的立体图;图2是本发明的俯视图;图3是本发明的agv小车的立体图;图4是本发明在激光束相交点位于纵向标识带左侧且光线斜向上时的坐标示意图;图5是本发明在激光束相交点位于纵向标识带左侧且光线斜向下时的坐标示意图;图6是本发明在激光束相交点位于纵向标识带右侧且光线斜向下时的坐标示意图;图7是本发明在激光束相交点位于纵向标识带右侧且光线斜向上时的坐标示意图;图8是本发明在激光束相交点位于横向标识带下侧且光线向右偏时的坐标示意图;图9是本发明在激光束相交点位于横向标识带下侧且光线向左偏时的坐标示意图;图10是本发明在激光束相交点位于横向标识带上侧且光线向右偏时的坐标示意
图;图11是本发明在激光束相交点位于横向标识带上侧且光线向左偏时的坐标示意图;附图标记说明:100、横向标识带;200、纵向标识带;300、agv小车;1、车体;2、扫描机构;21、扫描电机;22、直线电机;23、滑动块;24、长焦镜头;25、广角镜头;3、激光发射单元;4、图像处理单元;5、中央控制单元;6、摄像测距单元;7、通讯模块。
具体实施方式
12.下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
13.如图1至图11所示,本实施例所述的一种智能物流用基于标识带识别agv无人导航系统,包括多个相互垂直交叉均布在地面上的横向标识带100和纵向标识带200,以及可自主导航的agv小车300;agv小车300的数量可以为多个,根据实际需要自由设定;所述横向标识带100和纵向标识带200将地面分割为若干个网格区域;所述横向标识带100和纵向标识带200均为直角梯形结构,所述横向标识带100与纵向标识带200的颜色不同,所述横向标识带100和纵向标识带200的斜边与其直角边的颜色均不相同,如此可通过图片中的颜色信息,可以直接识别出横向标识带100或纵向标识带200的斜边和直角边;所述agv小车300包括车体1、扫描机构2、两个激光发射单元3、图像处理单元4、中央控制单元5;所述两个激光发射单元3分别对应固定安装于车体1底部的长宽两个方向的位置,且分别对应可在车体1下方的地面上投射出与车体1的长宽方向中心面重合的线状激光束;所述扫描机构2设于车体1底部的中心,并用于对地面上的横向标识带100、纵向标识带200、线状激光束进行拍摄得到照片,并将所述照片传输至图像处理单元4,且所述两个激光发射单元3位于扫描机构2的扫描范围内;所述图像处理单元4存储有坐标函数,并用于对所述照片分析处理;所述分析处理包括识别线状激光束与横向标识带100或纵向标识带200的相交位置,识别线状激光束之间的相交点,识别所述相交点与所述相交位置的位置关系,并测量出所述相交点沿光线路径至横向标识带100或纵向标识带200的长度、线状激光束被横向标识带100或纵向标识带200所截取的长度、以及线状激光束与横向标识带100或纵向标识带200的直角边的夹角,通过坐标函数计算得出agv小车300中心的坐标值以及agv小车300的姿态信息;所述中央控制单元5用于根据所述坐标值和所述姿态信息计算出最优路径以及控制agv小车300沿着最优路径行驶;其中,所述位置关系包括所述相交点位于所述相交位置的上侧、下侧、右侧或左侧,所述姿态信息包括agv小车300的车头朝向、agv小车300的车头向左偏、agv小车300的车头向右偏。
14.本实施例中,具体地,所述坐标函数包括如下:[(l2*sinα
‑
d)/tanβ l1*cosα]、[(l2*sinα
‑
d)/tanβ
‑
l1*cosα]、[(l2*sinα
‑
d)/tanβ (l1
‑
l2)*cosα]、[(l2*sinα
‑
d)/tanβ
‑
(l1
‑
l2)*cosα];其中,l1为线状激光束的相交点沿光线路径至横向标识带100或纵向标识带200的最大长度,l2为线状激光束被横向标识带100或纵向标识带200所截取的长度,α为线状激光束与横向标识带100或纵向标识带200的直角边的夹角,d为横向标识带100或纵向标识带200的端部宽度,β为横向标识带100或纵向标识带200的斜边与其直角边的夹角;如此通过视觉识别线状激光束的相交点以及线状激光束与标识带的轮廓形状,自动调取对应
的坐标函数,其中,线状激光束与标识带垂直时,调用任意一坐标函数;而当线状激光束的相交点位于横向标识带100与纵向标识带200相交区域时,此时通过横向标识带100与纵向标识带200相交区域的形状大小,由于每个横向标识带100与每个纵向标识带200相交区域的形状大小是唯一的,从而直接确定agv小车300的坐标值。在图4至图11中,l1为a、c两点之间的距离,l2为b、c两点之间的距离,d为h、k两点之间的距离。
[0015]
本实施例的工作方式是:工作时,地面上停放多个agv小车300,agv小车300上的两个激光发射单元3朝向地面发射出两条与车体1长宽方向中心面重合的线状激光束,形成两条相互垂直交叉的线状激光束,接着扫描机构2对车体1下方区域进行拍摄,从而获得地面的照片,该照片包含有如下:横向标识带100、纵向标识带200、横向的线状激光束、纵向的线状激光束以及两个线状激光束交点等特征,然后扫描机构2将照片传输至图像处理单元4,接着图像处理单元4对照片进行锐化处理,提高照片上各特征的轮廓清晰度,锐化处理后,图像处理单元4提取照片信息上各特征的轮廓线,并转化为线框图形;接着通过视觉识别线框图形以及识别线状激光束间的相交点与线状激光束和标识带的相交位置之间的位置关系后自动调取对应的坐标函数,分别对应计算得出线状激光束间的相交点的横向坐标和纵向坐标,由于线状激光束间的相交点与agv小车300的中心之间的横向间距和纵向间距是确定的,从而通过线状激光束间的相交点的横向坐标和纵向坐标而得到agv小车300的坐标值,通过agv小车300的坐标值,可以反映出agv小车300在地面上所处的位置,同时由于两个激光发射单元3的位置是确定的,通过扫描机构2拍摄的图片,识别出光源位置,结合标识带的宽度延伸方向,从而判断出agv小车300的车头朝向以及车头偏向,接着图像处理单元4将计算得出的agv小车300的坐标值和姿态信息传输至中央控制单元5,接着中央控制单元5计算出最优路径并控制agv小车300沿着最优路径进行行驶,同时通过得到不同的坐标值和姿态信息,调整agv小车300的行驶路径。
[0016]
本实施例利用在地面上铺设截面呈直角梯形的横向标识带100和纵向标识带200成型坐标网,并利用agv小车300上的激光发射单元3在地面上发射出线状激光束,从而通过图像处理单元4进行视觉识别并调用对应的坐标函数而得出agv小车300的坐标值,以及通过视觉识别激光发射单元3的位置和标识带的宽度延伸方向而判断出agv小车300的姿态信息,从而在中央控制单元5的控制下沿最优路径行驶,实现agv小车300的智能导航,具有控制灵活、简单、成本低的特点。
[0017]
基于上述实施例的基础上,进一步地,所述扫描机构2包括扫描电机21、直线电机22、两个滑动块23、长焦镜头24和广角镜头25;所述扫描电机21固定在车体1底部的中心,所述直线电机22连接在扫描电机21的输出端上,所述两个滑动块23对应连接在直线电机22的输出端上,所述长焦镜头24和广角镜头25分别对应安装在两个滑动块23上。
[0018]
实际使用时,agv小车300在运动过程中,扫描电机21通过直线电机22带动长焦镜头24和广角镜头25旋转,对车体1经过的区域进行扫描拍摄;在拍摄过程中,广角镜头25先以较大的焦距拍摄能够覆盖整个车体1下侧地面区域的照片,并将拍摄得到的照片传输至图像处理单元4,图像处理单元4对该照片进行锐化处理后获得照片中具有横向标识带100、纵向标识带200以及线状激光束的区域坐标信息,并将区域坐标信息传输至中央控制单元5,中央控制单元5控制直线电机22带动滑动块23移动,滑动块23带动长焦镜头24移动至上述区域坐标信息,长焦镜头24调整焦距对该区域内的特征进行拍摄,并获得高清晰度的照
片,接着图像处理单元4对获得的高清晰度的照片进行锐化处理,并计算得出agv小车300的坐标值和姿态信息,如此使得各个轮廓线更加清晰,更便于识别线框图形。
[0019]
基于上述实施例的基础上,进一步地,所述车体1的前后左右四个方向分别一一对应设置有摄像测距单元6;所述摄像测距单元6包括有用于对障碍物进行拍摄的摄像头以及用于探测摄像测距单元6与障碍物距离的超声波距离传感器。
[0020]
实际使用时,agv小车300运动过程中,位于车体1四周的摄像测距单元6可以通过超声波距离传感器实时探测行进方向有无障碍物,当超声波距离传感器探测到障碍物的存在时,摄像头对障碍物方向的环境进行拍摄,并获得包含障碍物特征的照片,图像处理单元4通过对包含障碍物特征的照片进行处理分析,得到障碍物大小和表面状态信息,通过超声波距离传感器获得障碍物的位置;如此保障agv小车300行进过程中的安全,导航更加安全可靠。
[0021]
基于上述实施例的基础上,进一步地,所述agv小车300还包括有用于进行即时交互通信的通讯模块7。如此设置,通过通讯模块7对各个agv小车300的实时位置、姿态、周围障碍物分布情况等信息实时共享,避免在不同agv小车300之间路线规划冲突而导致发生碰撞;同时共享信息有利于使各agv小车300获取更多周围环境信息用于建立全局地图,大大减少了对障碍物和环境特征的重复计算,提供系统运行效率,控制成本进一步降低。
[0022]
基于上述实施例的基础上,进一步地,所述图像处理单元4还用于对横向标识带100与纵向标识带200交汇处形成的四边形区域进行轮廓提取和特征分析;所述中央控制单元5设有与四边形区域一一对应的坐标值数据库。由于处于不同位置的横向标识带100和纵向标识带200交汇处形成的四边形区域的面积和形状具有唯一性,通过对照片中提取的四边形区域的面积和形状与坐标值数据库中的四边形区域数据进行对比,即可得出agv小车300的准确坐标值,对agv小车300运动过程中的坐标值进行校正,提高导航可靠性。
[0023]
基于上述实施例的基础上,进一步地,所述两个激光发射单元3的线状激光束在地面上的交汇点与车体1的中心在地面上的投影重合。即两个激光发射单元3分别对应固定安装于车体1底部的长宽两个方向的中心位置,此时,线状激光束间的相交点与agv小车300的中心之间的横向间距和纵向间距为零,简化agv小车300坐标值的计算。
[0024]
以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

