1.本发明涉及无人机安全系统技术领域,具体为用于港口码头吊车结构检测的无人机系统及其使用方法。
背景技术:
2.目前国内市场还没有使用无人机的港口吊车检测解决方案,以人工为主,费时费力,同时需要承担人工成本和安全风险。海外市场有无人机公司使用无人机平台来进行吊车检测,使用的是人工手动飞行检测,因此,对用于港口码头吊车结构检测的无人机系统及其使用方法的需求日益增长。
3.目前无人机的定位系统受限于地理环境和飞行条件,难以做到持续精准定位,无人机自主飞行容易因为定位不精准而撞击建筑物,容易造成用户损失和高空坠物的安全隐患,且目前的无人机的避障功能不完善,沿固定航线飞行容易撞击野生动物,而人工手动遥控精度较差,容易导致反应不灵敏避障不及时,因此,针对上述问题提出用于港口码头吊车结构检测的无人机系统及其使用方法。
技术实现要素:
4.本发明的目的在于提供用于港口码头吊车结构检测的无人机系统及其使用方法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.用于港口码头吊车结构检测的无人机系统及其使用方法,包括无人机、地面电脑和包装箱,所述包装箱內设有起落平台板和定点降落标识,所述定点降落标识与起落平台板车拆卸连接,所述无人机包括储能单元、飞行控制单元、动力系统、视觉处理单元、机载电脑和复合材料机体,所述复合材料机体由碳纤维和玻璃纤维制成,所述机载电脑包括冗余定位系统、避障系统、交互系统、通讯系统和图像处理系统。
7.优选的,所述冗余定位系统包括视觉传感器、惯性导航传感器、北斗传感器和超宽带传感器,所述避障系统包括结构光模块和激光雷达信号模块,所述通讯系统包括高带宽5g通讯模块,所述图像处理系统包括高精度的可变焦摄像头和多轴增稳云台。
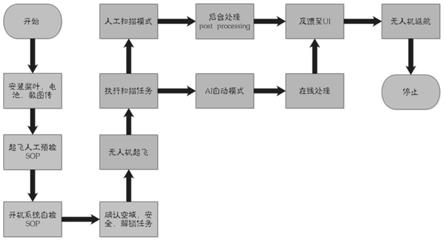
8.优选的,所述用于港口码头吊车结构检测的无人机系统的使用方法包括以下步骤:
9.a1、打开包装箱,安装无人机桨叶,安装储能单元,调试高带宽5g通讯模块的数字图像传输功能;
10.a2、安装起落平台板,将定点降落标识安装在起落平台板顶端;
11.a3、无人机置于起落平台板顶端,启动无人机,无人机开机系统自检,选定目标吊车的地理坐标和图像标识,设置要执行的检测项目;
12.a4、确认空域,确认安全信息,解锁检测任务,准备起飞;
13.a5、无人机从起落平台板起飞,执行扫描任务,可选择人工扫描模式,工作人员可
以后台处理并全程观察,或者启动ai自动模式,使用ai算法让无人机自行决定视觉传感器拍摄到的画面中是否存在相应的缺陷,磨损,松动等问题;
14.a6、算法或工作人员发现问题时,将地理坐标和问题描述信息反馈到交互系统,并记录在离线维护保养记录日志内,供工作人员观阅;
15.a7、无人机返航,无人机搜寻定点降落标识,降落在起落平台板顶端。
16.优选的,所述高精度的可变焦摄像头的分辨率为4k,所述高精度的可变焦摄像头的可变焦倍数为10倍,所述高带宽5g通讯模块的带宽为400mhz。
17.与现有技术相比,本发明的有益效果是:
18.1、本发明中,通过设置的冗余定位系统实现当无人机在金属结构的物体附近导致惯性导航传感器失准时也能够依赖视觉传感器和超宽带传感器定位,使无人机的定位精度和稳定性有很大的提高。
19.2、本发明中,通过设置的避障系统实现及时避障,结构光模块和激光雷达信号模块可以在物理层面识别障碍物从而达到避障的效果,避免无人机撞击野生动物。
附图说明
20.图1为本发明用于港口码头吊车结构检测的无人机系统的使用方法流程示意图;
21.图2为本发明无人机的结构示意图;
22.图3为本发明用于港口码头吊车结构检测的无人机系统的系统结构示意图。
23.图中:1
‑
飞行控制单元、2
‑
动力系统、3
‑
视觉处理单元、4
‑
机载电脑、5
‑
复合材料机体。
具体实施方式
24.实施例1:
25.请参阅图1,本发明提供一种技术方案:
26.用于港口码头吊车结构检测的无人机系统及其使用方法,包括无人机、地面电脑和包装箱,所述包装箱內设有起落平台板和定点降落标识,所述定点降落标识与起落平台板车拆卸连接,所述无人机包括储能单元、飞行控制单元1、动力系统2、视觉处理单元3、机载电脑4和复合材料机体5,所述复合材料机体5由碳纤维和玻璃纤维制成,所述机载电脑4包括冗余定位系统、避障系统、交互系统、通讯系统和图像处理系统。
27.所述冗余定位系统包括视觉传感器、惯性导航传感器、北斗传感器和超宽带传感器,所述避障系统包括结构光模块和激光雷达信号模块,所述通讯系统包括高带宽5g通讯模块,所述图像处理系统包括高精度的可变焦摄像头和多轴增稳云台,这种设置有利于精准定位和及时避障,所述用于港口码头吊车结构检测的无人机系统的使用方法包括以下步骤:
28.a1、打开包装箱,安装无人机桨叶,安装储能单元,调试高带宽5g通讯模块的数字图像传输功能;
29.a2、安装起落平台板,将定点降落标识安装在起落平台板顶端;
30.a3、无人机置于起落平台板顶端,启动无人机,无人机开机系统自检,选定目标吊车的地理坐标和图像标识,设置要执行的检测项目;
31.a4、确认空域,确认安全信息,解锁检测任务,准备起飞;
32.a5、无人机从起落平台板起飞,执行扫描任务,启动ai自动模式,使用ai算法让无人机自行决定视觉传感器拍摄到的画面中是否存在相应的缺陷,磨损,松动等问题;
33.a6、算法发现问题时,将地理坐标和问题描述信息反馈到交互系统,并记录在离线维护保养记录日志内,供工作人员观阅;
34.a7、无人机返航,无人机搜寻定点降落标识,降落在起落平台板顶端。
35.这种设置有利于自动完成检测任务;
36.所述高精度的可变焦摄像头的分辨率为4k,所述高精度的可变焦摄像头的可变焦倍数为10倍,所述高带宽5g通讯模块的带宽为400mhz,这种设置有利于无人机与地面进行高质量视频传输。
37.实施例2与实施例1相同部分不在赘述,不同之处是:
38.a5、无人机从起落平台板起飞,执行扫描任务,可选择人工扫描模式,工作人员可以后台处理并全程观察,工作人员判断决定视觉传感器拍摄到的画面中是否存在相应的缺陷,磨损,松动等问题;
39.a6、工作人员发现问题时,将地理坐标和问题描述信息反馈到交互系统,并记录在离线维护保养记录日志内,供工作人员观阅;
40.这种设置便于在ai算法不成熟时凭借人工经验实现精准判断港口码头吊车结构的缺陷,磨损,松动等问题。
41.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本发明的方法及其核心思想。以上所述仅是本发明的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将发明的构思和技术方案直接应用于其它场合的,均应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

