1.本发明属于机构学与机器人学技术领域,特别涉及一种重心可调并联仿生移动机器人的控制方法。
背景技术:
2.智能型移动机器人作为国家战略在国防、军事、航空等领域中发挥着越来越重要的作用。目前已知的移动机器人中,轮式移动机器人具有最高的灵活性和机动性,但普通的轮式机器人其存在弊端也显而易见,受限于轮式机器人的底盘约束和轮径约束,其非结构化地形通过能力差,目前的解决方法多样,如增加轮子个数、采用可变形轮、轮腿融合等方法。
3.例如专利cn110304161b公开的一种可变形的履带式行走装置,通过在支撑架两侧安装四个可变形履带轮和翻转机构,可以在遇到有障碍物路段时,履带轮在变形机构的作用下由初始水平位置偏转至倾斜位置,接着翻转机构驱动变形轮发生翻转,以越过障碍物。采用这种方案牺牲了轮式机器人灵活性强的优势,同时使得机器人的轮子部分过于复杂,翻越障碍物时依然需要依靠扩大轮径等方法来实现跨越。
技术实现要素:
4.本发明的目的在于提供一种重心可调并联仿生移动机器人的控制方法,通过并联机构驱动及重心模块的调整,即可实现移动机器人的姿态变化以及重心调整,使其可以模仿出四足机器人的步态,拥有轮式移动和足式移动两种移动模式,更好地适应地形,提高障碍通过能力。
5.为达成上述目的,本发明的解决方案为:一种重心可调并联仿生移动机器人的控制方法,包括以下步骤:
6.1)安装:将一种重心可调的并联仿生移动机器人进行安装,所述重心可调的并联仿生移动机器人包括两侧安装有前轮的前车身、两侧安装有后轮的后车身、可重构并联仿生躯干、重心调整装置和总控面板;所述可重构并联仿生躯干包括左spr支链、右spr支链、sps支链和upva支链,所述左spr支链、右spr支链、sps支链依次从左至右并列连接在所述前车身和后车身之间,所述upva支链位于所述sps支链的上方,并连接在所述前车身和后车身之间;所述左spr支链、右spr支链、sps支链各设有至少一个独立驱动电机,所述upva支链包括第一万向副、第一移动副、可重构运动副和两个独立驱动电机,所述可重构运动副安装一个独立驱动电机,第一万向副或第一移动副安装另一个独立驱动电机,所有的独立驱动电机连接所述总控面板;可重构运动副包括半圆环、左弧形片、右弧形片、t型铰链,所述t型铰链的底部转动连接所述第一移动副,所述t型铰链的顶部轴线两侧分别铰接所述左弧形片的一端和右弧形片的一端,左弧形片和右弧形片反向对称设置,左弧形片的另一端和右弧形片的另一端分别铰接所述半圆环的内侧两端,所述前车身开设前安置槽,所述半圆环的外侧两端连接在所述前安置槽内;所述重心调整装置由盘形底座、旋转电机和配重块组成,
配重块固定在盘型底座的边缘,盘型底座的中心连接所述旋转电机,旋转电机安装在所述upva支链的第一移动副下部;
7.2)移动机器人重心求解模型的建立:将移动机器人的重量划分为五个区域g
i
,i=(1,2,3,4)及g
c
,其中g1、g2、g3、g4分别代表移动机器人两个前轮和两个后轮四个区域的重量,g
c
代表可重构并联仿生躯干的重量,近似认为每个区域的质量均匀,可重构并联仿生躯干与两个前轮和两个后轮四个区域的连接处坐标分别为c1(x
c1
,y
c1
,z
c1
)、c2(x
c2
,y
c2
,z
c2
)、c3(x
c3
,y
c3
,z
c3
)、c4(x
c4
,y
c4
,z
c4
),移动机器人两个前轮和两个后轮的着地点分别为t1(x
t1
,y
t1
,z
t1
),t2(x
t2
,y
t2
,z
t2
),t3(x
t3
,y
t3
,z
t3
),t4(x
t4
,y
t4
,z
t4
);
8.移动机器人的g
c
区域加装有重心调整装置,对g
c
区域x轴和y轴方向产生的重心偏移量设为δx
center
和δy
center
,由不规则四边形重心求解方程可知:g
center
投影在地面的坐标为(x
center
,y
center
,0),其中:
[0009][0010]
则移动机器人的重心cog投影在地面的坐标为cog'(x
cog
,y
cog
,0),其中:
[0011][0012]
3)躯干及车轮的重心调整:当在平地上移动时,移动机器人切换到轮式移动模式,只需启用左spr支链、右spr支链和upva支链,sps支链不动,upva支链的轴线为水平方向,此时可重构并联仿生躯干为三驱动;当遇到障碍物时,移动机器人抬起其中一个轮子迈过障碍物的过程中,移动机器人开始进入姿态调整,移动机器人切换到足式移动模式,通过独立控制四个轮子锁死,左spr支链、右spr支链、upva支链和sps支链同时启用,upva支链的轴线变为竖直方向,此时可重构并联仿生躯干为四驱动,再根据位姿变化实时测算移动机器人重心,移动机器人的另外三个落在地面上的轮子组成支撑多边形,在不改变步幅的情况下,可以拉长可重构并联仿生躯干的长度,改变支撑多边形的形状,同时将g
c
区域的配重块向抬起轮子的反方向倾斜,即可将重心投影点拉回新的支撑三角形内,保证移动机器人平稳前行。
[0013]
采用上述方案后,本发明的有益效果在于:本发明从仿生角度去尝试解决背景技术的问题,仿生机器人是机器人发展的高级阶段。生物特性为机器人的设计提供了许多有益的参考,使得机器人可以从生物体上学习如自适应性、鲁棒性、运动多样性和灵活性等一系列良好的性能。利用可重构机构变构态、变自由度的特性,通过不同的驱动方式实现仿生机器人腰部变形,模拟四足行走动物的腰部结构,实现对四足动物的仿生。加上重心模块的调整,即可实现移动机器人的姿态变化与重心调整相辅相成,使其可以模仿出四足机器人的步态,拥有轮式移动和足式移动两种移动模式,同时机器人能够依靠自身仿生腰部形变
调整重心位置,平稳通过连续复杂地形,提高仿生移动机器人的灵活性和对不同地形环境的适应能力,提高障碍通过能力,构建一种更加高效灵活的移动方式,可应用于星球探测、反恐防暴、抢险勘探等领域。
附图说明
[0014]
图1为本发明的重心控制方法流程示意图;
[0015]
图2为本发明的移动机器人整体结构示意图;
[0016]
图3为本发明可重构仿生并联躯干立体示意图;
[0017]
图4为本发明可重构运动副的立体示意图;
[0018]
图5为本发明可重构运动副的运动变化示意图;
[0019]
图6为本发明重心调整装置立体示意图;
[0020]
图7为本发明前车身立体示意图;
[0021]
图8为本发明后车身立体示意图;
[0022]
图9为本发明重心求解数学模型原理示意图;
[0023]
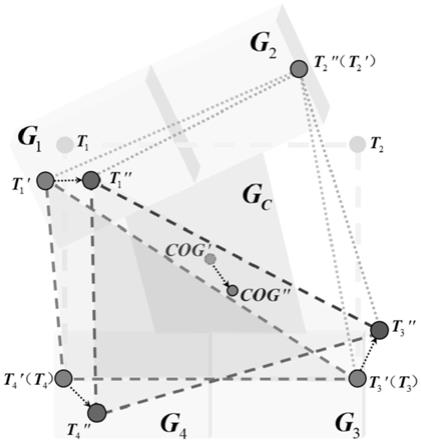
图10为本发明重心投影的示意图;
[0024]
图11为本发明的重心调整过程示意图。
[0025]
标号说明:
[0026]
前车身1、前安置槽11、前轮架12、前轮2、后车身3、后安置槽31、后轮架32、后轮4、可重构并联仿生躯干5、左spr支链51、右spr支链52、sps支链53、upva支链54、第一万向副541、第一移动副542、可重构运动副543、半圆环5431、左弧形片5432、右弧形片5433、t型铰链5434、重心调整装置6、盘形底座61、配重块62、总控面板7。
具体实施方式
[0027]
以下结合附图及具体实施例对本发明做详细的说明。
[0028]
本发明提供一种重心可调并联仿生移动机器人的控制方法,如图2所示,一种重心可调并联仿生移动机器人包括两侧安装有前轮2的前车身1、两侧安装有后轮4的后车身3、轮组单元、可重构并联仿生躯干5、重心调整装置6和总控面板7,如图2所示;
[0029]
结合图7和图8,所述轮组单元包括前轮架12、前轮驱动组件(图中未示出)、后轮架22、后轮驱动组件,所述前轮2安装在所述前轮架12上,所述前轮架12连接在前车身1上,所述后轮4安装在所述后轮架22上,所述后轮架22连接在后车身3上。所述前轮驱动组件安装在所述前车身1内,用于连接前轮2,所述后轮驱动组件安装在所述后车身3内,用于连接后轮4,所述前轮驱动组件和后轮驱动组件连接所述总控面板7,因此总控面板7可以通过前轮驱动组件独立驱动前轮2,且通过后轮驱动组件独立驱动后轮4。
[0030]
如图3所示,所述可重构并联仿生躯干5包括左spr支链51、右spr支链52、sps支链53和upva支链5454(va是variable axis可变轴线的英文缩写),所述左spr支链51和右spr支链52的结构相同,左spr支链51由第二球副、第二移动副和第二转动副组成,右spr支链52由第三球副、第三移动副和第三转动副组成,sps支链53由第四球副、第四移动副和第五球副组成。第二球副、第三球副和第四球副连接在后车身3上,第二转动副、第三转动副和第五球副连接在前车身1上。
[0031]
所述左spr支链51、右spr支链52、sps支链53依次从左至右并列连接在所述前车身1和后车身3之间。
[0032]
所述upva支链54位于所述sps支链53的上方,并连接在所述前车身1和后车身3之间;
[0033]
所述左spr支链51、右spr支链52、sps支链53各设有至少一个独立驱动电机(图中未示出),如图3所示,所述upva支链54包括第一万向副541、第一移动副542、可重构运动副543和两个独立驱动电机(图中未示出),所述可重构运动副543安装一个独立驱动电机,第一万向副541或第一移动副542安装另一个独立驱动电机,从而可重构运动副543和其他两个运动副(第一万向副541和第一移动副542)的运动是分开的,所有的独立驱动电机连接所述总控面板7。
[0034]
如图4和图5所示,可重构运动副543包括半圆环5431、左弧形片5432、右弧形片5433、t型铰链5434,所述t型铰链5434的底部转动连接所述第一移动副542,所述t型铰链5434的顶部轴线两侧分别铰接所述左弧形片5432的一端和右弧形片5433的一端,左弧形片5432和右弧形片5433反向对称设置,左弧形片5432的另一端和右弧形片5433的另一端分别铰接所述半圆环5431的内侧两端,结合图1,所述前车身1开设前安置槽11,所述半圆环5431的外侧两端连接在所述前安置槽11内,所述后车身3开设后安置槽31,所述upva支链54的第一万向副541采用十字轴式万向节,所述十字轴式万向节的u型铰链连接所述第一移动副542,所述十字轴式万向节的十字铰链连接在后安置槽31内。
[0035]
可重构运动副543的独立驱动电机具体可安装在左右弧形片5433与t型铰链5434两侧的连接处,可重构运动副543的独立驱动电机驱动左右弧形片5433可绕半圆环5431旋转从而带动t型铰链5434旋转,实现t型铰链5434轴线方向的改变,例如,如图2和图3所示t型铰链5434的轴线方向原来是沿水平方向,此时upva支链54只有一个自由度,如图5所示,经驱动后,t型铰链5434的轴线方向变成沿竖直方向,此时upva支链54便有了两个自由度,分别为r相和u相。由于可重构运动副543的特殊设计,使得可重构运动副543能够在虎克铰与普通铰链之间进行重构切换,自由度可根据路况进行变换。
[0036]
本发明具有两种运动模式,一种是轮式移动模式,另一种是足式移动模式,当移动机器人处于轮式移动模式时,通过独立控制四个轮子转动使移动机器人较为平整移动,该模式下,可重构并联仿生躯干5及重心调整装置6不进行运动;当移动机器人处于足式移动模式时,通过独立控制四个轮子锁死,这种模式下通过可重构并联仿生躯干5配合重心调整装置6实现足式运动,可以实现类似四足动物的行走步态,完成攀爬、姿态调整等动作。
[0037]
如图6所示,所述重心调整装置6由盘形底座61、旋转电机(图中未示出)和配重块62组成,配重块62固定在盘型底座的边缘,盘形底座61的中心连接所述旋转电机,旋转电机安装在整个移动机器人的中部,即所述upva支链54的第一移动副542下部。当移动机器人在移动过程中需要进行重心调整时,通过旋转电机驱动盘形底座61旋转,带动配重块62偏置在不同方位,从而实现对移动机器人重心进行调整,保证移动机器人在运动或姿态调整过程中保持一定的稳定裕度,防止其发生倾覆。
[0038]
所述总控面板7安装在前车身1,加上可重构运动副543使得可重构并联仿生躯干5的控制中心集中在机身前部,通过实时分析计算对自身模式和姿态进行调整。
[0039]
一种重心可调并联仿生移动机器人的控制方法,如图1所示,包括以下步骤:
[0040]
1)安装:将一种重心可调的并联仿生移动机器人进行安装,移动机器人按上述结构安装完成;
[0041]
2)移动机器人重心求解模型的建立:如图9所示,将移动机器人的重量划分为五个区域g
i
,i=(1,2,3,4)及g
c
,即对应图9中的五个区块,其中g1、g2、g3、g4分别代表移动机器人两个前轮2和两个后轮4四个区域的重量,g
c
代表可重构并联仿生躯干5的重量,近似认为每个区域的质量均匀,可重构并联仿生躯干5与两个前轮2和两个后轮4四个区域的连接处坐标分别为c1(x
c1
,y
c1
,z
c1
)、c2(x
c2
,y
c2
,z
c2
)、c3(x
c3
,y
c3
,z
c3
)、c4(x
c4
,y
c4
,z
c4
),移动机器人两个前轮2和两个后轮4的着地点分别为t1(x
t1
,y
t1
,z
t1
),t2(x
t2
,y
t2
,z
t2
),t3(x
t3
,y
t3
,z
t3
),t4(x
t4
,y
t4
,z
t4
),其中,t1t2、t2t3、t3t4、t4t1的中点分别为c
front
、c
right
、c
back
、c
left
,c
front
c
back
与c
left
c
right
相交于g
center
。
[0042]
移动机器人的g
c
区域加装有重心调整装置6,对g
c
区域x轴和y轴方向产生的重心偏移量设为δx
center
和δy
center
,由不规则四边形重心求解方程可知:g
center
投影在地面的坐标为(x
center
,y
center
,0),其中:
[0043][0044]
则移动机器人的重心cog投影在地面的坐标为其中:
[0045][0046]
3)躯干及车轮的重心调整:总控面板通过前轮驱动组件和后轮驱动组件驱动整体移动,当在平地上移动时,移动机器人切换到轮式移动模式,只需启用左spr支链51、右spr支链52和upva支链54,sps支链53不动,upva支链54的轴线为水平方向,此时可重构并联仿生躯干5为三驱动,足够满足在平地上移动的需要;当遇到障碍物时,移动机器人抬起其中一个轮子迈过障碍物的过程中,移动机器人开始进入姿态调整,移动机器人切换到足式移动模式,通过独立控制四个轮子2,4锁死,左spr支链51、右spr支链52、upva支链54和sps支链53同时启用,upva支链54的轴线变为竖直方向,此时可重构并联仿生躯干5为四驱动,灵活性更高;再根据位姿变化实时测算移动机器人重心,如图10所示,以移动机器人的右前轮2遇到障碍物右前轮向上抬起为例来说明重心调整过程,遇到障碍物,重心位置发生改变,此时重心投影点为cog',移动机器人的另外三个落在地面上的轮子组成支撑多边形,移动机器人迈步过程中,稳定裕度最小的时刻即为单腿向远端迈出达到最大步幅的时刻,如果不进行重心调整、及支撑多边形和重心调整装置6均不发生改变,则如图11所示,移动机器人的重心cog'将落于支撑多边形t1't3't4'之外,此时移动机器人将会发生倾覆,这时需要进行重心调整,在不改变步幅的情况下,可以拉长可重构并联仿生躯干5的长度,改变支撑多边形的形状,同时将g
c
区域的配重块62抬起轮子的反方向即左后方倾斜,从而可将新的
重心投影点cog”拉回新的支撑三角形t
1”t
3”t
4”内,保证机构平稳前行。
[0047]
可重构并联仿生躯干5上的重心调整装置6与整体车身的形态相关联并对机构重心实时进行动态调整,保证移动机器人移动过程中的稳定性。
[0048]
可重构并联仿生躯干5中央的sps支链53采用较高强度结构件,能够使得移动机器人在变换姿态的过程中依然保持较高的刚度。
[0049]
本发明设计了具有机动灵活性高、地形通过能力强的仿生机器人,将可重构并联机构应用到轮式机器人的腰部,利用可重构机构变构态、变自由度的特性,通过不同的驱动方式实现仿生机器人腰部变形,模拟四足行走动物的腰部结构,实现对四足动物的仿生,所设计的并联仿生移动机器人能够跨越2倍轮径的垂直障碍以及大于0.5倍的自身长度的壕沟障碍,同时通过加装重心调整装置6,使得仿生机器人能够适应复杂的非机构化路面以及连续崎岖路面,可应用于星球探测、反恐防暴、抢险勘探等领域。
[0050]
以上所述仅为本发明的较佳实施例,并非对本案设计的限制,凡依本案的设计关键所做的等同变化,均落入本案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

