一种基于模糊控制的变预测时域mpc路径跟踪方法
技术领域
1.本发明涉及机器人运动控制领域,具体为一种基于模糊控制的变预测时域mpc路径跟踪方法。
背景技术:
2.mpc全称模型预测控制,由于其局部滚动优化的控制方式带来的良好抗干扰能力常被用在移动机器人运动控制过程中的路径跟踪环节。预测时域是模型预测控制的最重要参数之一,预测时域的大小反映的是模型对未来路径的预测能力。目前mpc应用于路径跟踪时基本是基于固定预测时域建立模型。预测时域选取过大,会增加算法的复杂度,增加控制量解算时间,进而降低控制预测跟踪精度,预测时域选取过小则容易导致跟踪效果不稳定,使机器人的实际移动产生震荡。在跟踪曲率变化较大,期望速度变化较大的参考路径时,mpc路径跟踪的稳定性难以保证。
技术实现要素:
3.本发明的目的是克服上述现有技术的缺点,提供一种可提高mpc路径跟踪对不同参考路径的算法适应性和稳定性的基于模糊控制的变预测时域mpc路径跟踪方法。
4.本发明是通过以下技术方案来实现的:一种基于模糊控制的变预测时域mpc路径跟踪方法,包括步骤:
5.s1.提取机器人参考路径的曲率并重新整定期望速度,其中,所述期望速度包括期望线速度和期望角速度;
6.s2.基于所述的期望线速度e,计算期望线速度变化率ec;
7.s3.设计模糊控制器,建立模糊逻辑规则;
8.s4.将期望线速度e和期望线速度变化率ec作为输入量,输入到模糊控制器中进行模糊处理,依据模糊逻辑规则得到预测时域增量
△
np;
9.s5.定义初始预测时域np=20,获取机器人当前的位置信息和速度信息、参考路径信息、期望速度信息,并将其作为输入建立预测模型;
10.s6.将预测时域增量
△
np和初始预测时域np进行叠加,叠加公式为n
p
=n
p
δn
p
,更新预测时域,并将更新后的预测时域输入到所述预测模型中;
11.s7.基于预测模型设计mpc路径跟踪器的函数公式,利用函数公式计算控制输出量控制机器人运动,并更新当前的参考路径信息、期望速度、机器人的位置信息和速度信息。
12.进一步地:步骤s1所述的期望线速度和期望角速度的计算方法为,
13.s11.根据路径点的坐标关系,计算每个参考路径点的曲率γ,曲率γ的计算公式为,
14.15.其中y'是参考路径在当前路径点处的一阶导数,y”是参考路径在当前路径点处的二阶导数;
16.s12.通过每个参考路径点的曲率γ,计算每个路径点的期望线速度和期望角速度,期望线速度v
r
和曲率γ呈线性关系,其计算公式为,
17.v
r
=k*γ v018.其中,k为比例系数,比例系数k选定为
‑
0.8,v0为基础期望线速度,基础期望线速度v0选定为0.2m/s。
19.选定期望线速度后,则期望角速度w
r
为,w
r
=v
r
*γ。
20.进一步地:步骤s4所述的期望线速度e为机器人参考路径点对应的期限线速度,所述的期望线速度e的论域设置为[0,2],根据论域生成模糊集合,模糊集合的成员包括nb,ns,zo,ps,pb,分别代表速度很低,速度较低,速度中等,速度较高,速度很高。
[0021]
进一步地:步骤s4所述的期望线速度变化率ec为机器人参考路径点对应的期望线速度变化率,所述的期望线速度变化率的论域设置为[
‑
0.5,0.5],根据论域生成模糊集合,模糊集合的成员包括nb,ns,zo,ps,pb,分别代表速度减小得很快,速度减小得很慢,速度基本不变,速度增加得很慢,速度增加得很快。
[0022]
进一步地:步骤s4所述的预测时域增量
△
np为机器人mpc路径跟踪的预测时域增量,所述的预测时域增量
△
np的论域设置为[
‑
5,5],根据论域生成模糊集合,模糊集合的成员包括nb,ns,zo,ps,pb,分别代表预测时域减少量较大,预测时域减少量较小,预测时域基本不变,预测时域增加量较小,预测时域增加量较大。
[0023]
进一步地:步骤s3所述的模糊逻辑规则的设计策略如下,
[0024]
当速度较低或者中等,但速度变化较小的时候,预测时域保持现状;
[0025]
当速度较低或者中等且速度变化增加较快时,预测时域则少量增加;
[0026]
当速度较高且速度变化较小的时候,预测时域根据加减速根据情况对应适当增大或减少;
[0027]
当速度较高且速度变化较大的时候,预测时域根据加减速根据情况对应较大的增大或减少。
[0028]
进一步地:步骤s6所述的预测时域给定的最大值约束为40,当预测时域大于给定的最大值时,取最大值40,预测时域给定的最小值约束为10,当预测时域小于最小值时,取最小值10。
[0029]
进一步地:步骤s7所述的函数公式如下,
[0030][0031]
其中,q和r为权重系数,x(t)为机器人当前状态;x
r
(t)为当前参考路径点的状态;u(t)为模型将要输出的控制量,包含线速度和角速度;u
r
(t)为当前参考路径点期望速度,包括期望线速度和期望角速度。
[0032]
进一步地:所述函数公式的约束条件为,
[0033]
u
min
<u(t)
‑
u
r
(t)<u
max
[0034]
δu
min
<δ(u(t)
‑
u
r
(t))<δu
max
[0035]
其中,u
min
为输出控制量和期望速度之差的最小值,设为[
‑
1.2m/s,
‑
0.8rad/s];
u
max
为输出控制量和期望速度之差的最大值,设为[1.2m/s,0.8rad/s];δu
min
为输出控制量和期望速度之差变化率最小值,设为[
‑
0.5m/s,
‑
0.08rad/s];δu
max
为输出控制量和期望速度之差变化率最大值,设为[0.5m/s,0.08rad/s]。
[0036]
本发明的有益效果:
[0037]
与现有技术相比,本发明通过依据机器人参考路径的曲率变化,重新整定机器人跟踪运动的期望速度,再基于期望速度的大小和变化率,设计模糊控制器实现对mpc跟踪算法预测时域的时变调节,最后设计mpc路径跟踪器输出控制量实现对参考路径的跟踪,从而结合模糊控制器输出的预测时域变化量,实现在曲率较大的情况下选择较低的速度、较小的预测时域进行路径跟踪,在曲率较小的情况下,选择较高的速度、较大的预测时域进行路径跟踪,从而提高mpc路径跟踪对不同参考路径的算法适应性和稳定性。
附图说明
[0038]
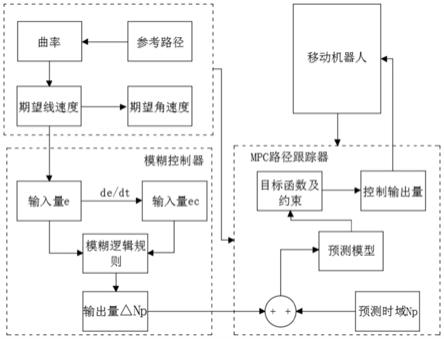
图1为本发明的工作流程图;
[0039]
图2为本发明的模糊控制器的模糊逻辑规则表。
具体实施方式
[0040]
参考图1,一种基于模糊控制的变预测时域mpc路径跟踪方法,包括步骤:
[0041]
s1.提取机器人参考路径的曲率并重新整定期望速度,其中,所述期望速度包括期望线速度和期望角速度。
[0042]
具体的,所述的期望线速度和期望角速度的计算方法为,
[0043]
s11.根据路径点的坐标关系,计算每个参考路径点的曲率γ,曲率γ的计算公式为,
[0044][0045]
其中y'是参考路径在当前路径点处的一阶导数,y”是参考路径在当前路径点处的二阶导数;
[0046]
s12.通过每个参考路径点的曲率γ,计算每个路径点的期望线速度和期望角速度,期望线速度v
r
和曲率γ呈线性关系,其计算公式为,
[0047]
v
r
=k*γ v0[0048]
其中,k为比例系数,比例系数k选定为
‑
0.8,v0为基础期望线速度,基础期望线速度v0选定为0.2m/s。
[0049]
选定期望线速度后,则期望角速度w
r
为,w
r
=v
r
*γ。
[0050]
s2.基于所述的期望线速度e,计算期望线速度变化率ec。
[0051]
s3.设计模糊控制器,建立模糊逻辑规则。
[0052]
具体的,所述的模糊逻辑规则的设计策略如下:
[0053]
当速度较低或者中等,但速度变化较小的时候,预测时域保持现状。
[0054]
当速度较低或者中等且速度变化增加较快时,预测时域则少量增加。
[0055]
当速度较高且速度变化较小的时候,预测时域根据加减速根据情况对应适当增大
或减少。
[0056]
当速度较高且速度变化较大的时候,预测时域根据加减速根据情况对应较大的增大或减少。
[0057]
具体模糊规则表如图2所示。
[0058]
s4.将期望线速度e和期望线速度变化率ec作为输入量,输入到模糊控制器中进行模糊处理,依据模糊逻辑规则得到预测时域增量
△
np。
[0059]
具体的,期望线速度e和期望线速度变化率ec呈周期性输入到模糊控制器中,直到跟踪结束。
[0060]
所述的期望线速度e为机器人参考路径点对应的期限线速度,所述的期望线速度e的论域设置为[0,2],根据论域生成模糊集合,模糊集合的成员包括nb,ns,zo,ps,pb,分别代表速度很低,速度较低,速度中等,速度较高,速度很高。
[0061]
所述的期望线速度变化率ec为机器人参考路径点对应的期望线速度变化率,所述的期望线速度变化率的论域设置为[
‑
0.5,0.5],根据论域生成模糊集合,模糊集合的成员包括nb,ns,zo,ps,pb,分别代表速度减小得很快,速度减小得很慢,速度基本不变,速度增加得很慢,速度增加得很快。
[0062]
所述的预测时域增量
△
np为机器人mpc路径跟踪的预测时域增量,所述的预测时域增量
△
np的论域设置为[
‑
5,5],根据论域生成模糊集合,模糊集合的成员包括nb,ns,zo,ps,pb,分别代表预测时域减少量较大,预测时域减少量较小,预测时域基本不变,预测时域增加量较小,预测时域增加量较大。
[0063]
s5.定义初始预测时域np=20,获取机器人当前的位置信息和速度信息、参考路径信息、期望速度信息,并将其作为输入建立预测模型。
[0064]
具体的,所述的预测时域给定的最大值约束为40,当预测时域大于给定的最大值时,取最大值40,预测时域给定的最小值约束为10,当预测时域小于给定的最小值时,取最小值10。
[0065]
s6.将预测时域增量
△
np和初始预测时域np进行叠加,叠加公式为n
p
=n
p
δn
p
,更新预测时域,并将更新后的预测时域输入到所述预测模型中。
[0066]
s7.基于预测模型设计mpc路径跟踪器的函数公式,利用函数公式计算控制输出量控制机器人运动,并更新当前的参考路径信息、期望速度、机器人的位置信息和速度信息。
[0067]
具体的,所述的函数公式如下:
[0068][0069]
其中,q和r为权重系数,x(t)为机器人当前状态;x
r
(t)为当前参考路径点的状态;u(t)为模型将要输出的控制量,包含线速度和角速度;u
r
(t)为当前参考路径点期望速度,包括期望线速度和期望角速度。
[0070]
所述函数公式的约束条件为:
[0071]
u
min
<u(t)
‑
u
r
(t)<u
max
[0072]
δu
min
<δ(u(t)
‑
u
r
(t))<δu
max
[0073]
其中,u
min
为输出控制量和期望速度之差的最小值,设为[
‑
1.2m/s,
‑
0.8rad/s];u
max
为输出控制量和期望速度之差的最大值,设为[1.2m/s,0.8rad/s];δu
min
为输出控制量
和期望速度之差变化率最小值,设为[
‑
0.5m/s,
‑
0.08rad/s];δu
max
为输出控制量和期望速度之差变化率最大值,设为[0.5m/s,0.08rad/s]。
[0074]
上列详细说明是针对本发明可行实施例的具体说明,该实施例并非用以限制本发明的专利范围,凡未脱离本发明所为的等效实施或变更,均应包含于本案的专利范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

