1.本发明属于控制技术领域,具体是一种控制环路性能指标测量方法。
背景技术:
2.基于自动控制理论,电气工程领域的被控对象经常被简化为线性定常系统。该类系统便于数学建模与分析,其控制系统一般由单个或多个控制环路级联而成。各控制环路之间相互独立,并受控于各自的环路调节器(线性或非线性)。因此,环路调节器的设计是整个控制系统设计的核心,需要遵循给定的性能指标(即:环路带宽与相角裕度)以满足预期的系统动静态性能要求。然而,因受到系统模型误差、参数扰动等因素的影响,调节器的设计性能指标与实际的性能指标之间始终存在误差,难以精确地满足控制系统的动静态性能要求。其根本原因在于根据模型推导开环传递函数的环路调节器设计思路属于开环设计方法,缺少实际环路性能指标信息的反馈。鉴于此,准确地测量控制环路的实际性能指标信息,对于调节器的闭环优化设计,控制系统的动静态性能保障具有极其重要的意义。
3.控制环路性能指标的测量包括控制带宽与相角裕度测量两部分,其中控制带宽反映了控制环路的动态性能,相角裕度则表征了稳定裕度。相角裕度可以通过控制带宽与开环传递函数直接求解,因此测量的核心任务是控制带宽的测量。目前比较常用的控制带宽测量方法大致可分为两种:1)阶跃响应法;2)频率响应法。其中,阶跃响应法只能通过经验公式估算带宽值,对于被控对象有谐振的情况不太适用。频率响应法原理简单,但实现难度较大。若借助动态信号分析仪进行测试,由于扫频数据输出速率受串口波特率制约,带宽测量值在高频时将存在较大误差。
技术实现要素:
4.本发明的目的为针对当前技术中存在的不足,提出一种控制环路性能指标测量方法,以实现对于控制环路截止频率与相角裕度的测量,为控制系统调节器的闭环优化设计提供重要的信息支撑,从而保障控制系统在参数扰动情况下的动静态性能。
5.本发明解决所述技术问题的技术方案是:设计一种控制环路性能指标测量方法,其特征在于,该方法包括如下步骤:
6.一种控制环路性能指标测量方法,其特征在于,该方法包括如下步骤:
7.(1)注入小信号
8.往被测控制环路中注入一个频率可变的正弦波小信号(x
p
(jω
est
));根据正弦波小信号(x
p
(jω
est
))的幅值(|x
p
(jω
est
)|)和角频率(ω
est
),可得到注入信号(x
p
)的表达式为x
p
=|x
p
(jω
est
)|sin(ω
est
t);
9.(2)提取检测信号
10.在控制环路的信号注入点的左右两侧设置有检测信号接口,分别用于实时检测信号注入点左侧检测信号(x
in
(jω
est
))与右侧检测信号(x
out
(jω
est
));左侧检测信号(x
in
(jω
est
))与右侧检测信号(x
out
(jω
est
))分别通过sogi提取出此时检测信号中在当前角频率
(ω
est
)下的左侧正弦信号(x
in
、)与右侧正弦信号(x
out
)的实部和虚部;利用)的实部和虚部;利用)的实部和虚部;利用)的实部和虚部;利用)的实部和虚部;利用得到左侧正弦信号(x
in
、)与右侧正弦信号(x
out
)的幅值与相角;
11.(3)动态寻频
12.控制环路开环传递函数(t)与横坐标的交点(ω
c
)就是对应的截止频率;由于t(jω
est
)=
‑
x
out
(jω
est
)/x
in
(jω
est
),即在角频率(ω
est
)下,|t|=|x
out
|/|x
in
|,将步骤(2)中得到左侧正弦信号(x
in
、)与右侧正弦信号(x
out
)的幅值代入到该公式中,当|t|=1时,即|x
out
(jω
est
)|=|x
in
(jω
est
)|时,当前角频率(ω
est
)即为控制环路的截止频率(ω
c
);截止频率(ω
c
)即为控制环路的带宽;
13.当|t|≠1,则在当前角频率(ω
est
)下,将|x
out
(jω
est
)|减去|x
in
(jω
est
)|得到的值经过一个pi调节器,得到注入信号(x
p
)的新的频率再将其乘2π得到新的角频率将新的角频率经过一个积分环节得到ω
1est
t;根据ω
1est
t,将注入信号(x
p
)中的sin(ω
est
t)调整为sin(ω
1est
t),继续执行步骤(2)的提取检测信号过程,并将在新的角频率下的左侧正弦信号(x
in
、)与右侧正弦信号(x
out
)的幅值代入|t|=|x
out
|/|x
in
|,若此时仍然|t|≠1,不断重复上述过程,不断调整角频率,直至|t|=1,实现动态寻频;
14.(4)相角裕度计算
15.根据步骤(3)得到的截止频率(ω
c
)以及对应角频率下的左侧正弦信号(x
in
、)与右侧正弦信号(x
out
)的相角,将其代入公式pm=∠x
out
(jω
est
)
‑
∠x
in
(jω
est
),得到被测控制环路的相角裕度。
16.与现有技术相比,本发明的有益效果为:本发明控制环路性能指标测量方法采用了动态寻频的思路,不需要像传统的频率响应法一样进行扫频,检测速度快。该性能指标测量方法可以测量控制环路的截止频率与相角裕度,为控制系统的闭环优化设计提供了宝贵的参考信息。
附图说明
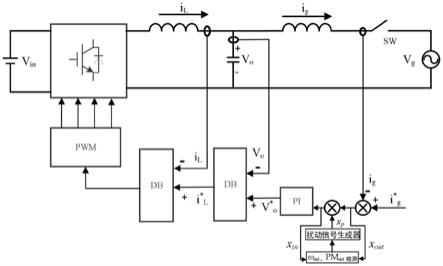
17.图1为本发明控制环路性能指标测量方法一种实施例的控制环路结构图。
18.图2为本发明控制环路性能指标测量方法的带宽测试原理示意图。
19.图3为本发明控制环路性能指标测量方法一种实施例的提取检测信号的原理框图。
20.图4为本发明控制环路性能指标测量方法一种实施例的当x
p
的角频率ω
est
为400hz时、左侧正弦信号x
in
、右侧正弦信号x
out
的波形图。
21.图5为本发明控制环路性能指标测量方法一种实施例的当x
p
的角频率ω
est
为880hz时、左侧正弦信号x
in
、右侧正弦信号x
out
的波形图。
具体实施方式
22.下面结合附图对本发明的技术方案进行详细说明。
23.在本实施例中,被测控制环路采用比较常见的单相全桥逆变电路,滤波器为lcl型滤波器,控制环路为i
l
‑
v
o
‑
i
g
的三环控制方式(左侧为内环,右侧为外环),具体控制形式为db
‑
db
‑
pi。如图1所示,现测试最外环即i
g
环(可视为一个电流闭环的系统)的带宽;
24.本发明提供的控制环路性能指标测量方法,用于测量图1电路中的i
g
环控制回路的带宽,包括如下步骤:
25.(1)注入小信号
26.往被测控制环路(i
g
环)中注入一个频率可变的正弦波小信号x
p
(jω
est
),可以通过扰动信号生成器实现变频信号的输入。根据正弦波小信号x
p
(jω
est
)的幅值|x
p
(jω
est
)|和角频率ω
est
,可得到注入信号x
p
的表达式为x
p
=|x
p
(jω
est
)|sin(ω
est
t);其中,j为虚数单位。本实施例中,往控制环路中注入一个幅值|x
p
(jω
est
)|为1、角频率ω
est
初始值为400hz的正弦波小信号。
27.(2)提取检测信号
28.在控制环路的信号注入点的左右两侧设置有检测信号接口,分别用于实时检测信号注入点左侧检测信号x
in
(jω
est
)与右侧检测信号x
out
(jω
est
);左侧检测信号x
in
(jω
est
)与右侧检测信号x
out
(jω
est
)分别通过sogi(二阶广义积分器)提取出此时检测信号中在角频率ω
est
下的左侧正弦信号x
in
、右侧正弦信号x
out
的实部(角标r表示实部)和虚部(角标i表示虚部)。利用示虚部)。利用示虚部)。利用示虚部)。利用得到左侧正弦信号x
in
、右侧正弦信号x
out
的幅值与相角。
29.(3)动态寻频
30.控制环路开环传递函数t与横坐标的交点ω
c
就是对应的截止频率。由于t(jω
est
)=
‑
x
out
(jω
est
)/x
in
(jω
est
),即在角频率ω
est
下,|t|=|xout|/|x
in
|,将步骤(2)中得到左侧正弦信号x
in
、右侧正弦信号x
out
的的幅值代入到该公式中,当|t|=1时,即|x
out
(jω
est
)|=|x
in
(jω
est
)|时,当前角频率ω
est
即为控制环路的截止频率ω
c
。
31.当|t|≠1,则在当前角频率ω
est
下,将|x
out
(jω
est
)|减去|x
in
(jω
est
)|得到的值经过一个pi调节器(附图中符号为g
f
(s),即比例积分调节器,本实施例采用:s’=gf(s)=11660 2668000/s),得到注入信号x
p
的新的频率的值,再将其乘2π得到新的角频率将新的角频率经过一个积分环节(附图中用∫表示,传递函数g(s)=1/s)得到ω
1est
t。根据ω
1est
t,将注入信号x
p
中的sin(ω
est
t)调整为sin(ω
1est
t),继续执行步骤(2)的提取检测信号过程,并将在新的角频率下的左侧正弦信号x
in
、与右侧正弦信号x
out
的幅值代入|t|=|x
out
|/|x
in
|,若此时仍然|t|≠1,不断重复上述过程,不断调整角频率,直至|t|=1,实现动态寻频;
32.当|x
out
(jω
est
)|>|x
in
(jω
est
)|时,说明此时的注入信号x
p
的角频率ω
est
大于截止频率ω
c
,需要减小注入信号x
p
的角频率ω
est
;当|x
out
(jω
est
)|<|x
in
(jω
est
)|时,注入信号x
p
的角频率ω
est
小于截止频率ω
c
,需要增大注入信号x
p
的角频率ω
est
;
33.不断调节,直至|x
out
(jω
est
)|=|x
in
(jω
est
)|,即左侧正弦信号x
in
的幅值与右侧正弦信号x
out
的幅值相等,此时注入信号x
p
的角频率ω
est
即为控制环路的截止频率ω
c
。截止
频率ω
c
即为控制环路的带宽。、
34.根据上述条件判断并改变注入信号x
p
的角频率ω
est
,可以使其快速地向截止频率ω
c
靠拢,直到ω
est
=ω
c
,即实现了快速寻频的目的。而开环传递函数的截止频率与控制环路的带宽非常接近,在工程应用中一般不做区分,因此该方法也就实现了对于控制环路带宽的测量。
35.当x
p
的角频率ω
est
为400hz时左侧正弦信号x
in、
右侧正弦信号x
out
的波形如图4所示。从图4中可以看出,左侧正弦信号x
in
的幅值小于右侧正弦信号x
out
的幅值,说明现被测环路的截止频率高于400hz。不断增加注入信号x
p
的角频率ω
est
,直至左侧正弦信号x
in
的幅值与右侧正弦信号x
out
的幅值相等。当注入信号x
p
的角频率ω
est
为880hz时,左侧正弦信号x
in
、右侧正弦信号x
out
的波形如如图5所示,此时,左侧正弦信号x
in
的幅值和右侧正弦信号x
out
的幅值相等,那么880hz即为系统的截止频率ω
c
,即该控制环路的带宽为880hz。
36.(4)相角裕度计算
37.根据步骤(3)得到的截止频率ω
c
=880hz以及对应角频率下的左侧正弦信号x
in
、右侧正弦信号x
out
的相角,将其代入公式pm=∠x
out
(jω
est
)
‑
∠x
in
(jω
est
),得到被测控制环路的相角裕度pm
est
为42
°
。
38.本实施例中的控制环路,经理论计算,其截止频率为900hz,相角裕度45
°
,控制环路的实际截止频率和相角裕度会低于此,从测量结果看,该控制环路的理论值与经过本发明控制环路性能指标测量方法得到的结果相吻合,所以在误差允许的范围内,测量结果准确。
39.本发明控制环路性能指标测量方法只需要将小信号注入到原控制环路中的输入参考值处,并根据原控制环路中的输出采样信号把对应频率处正弦波的幅值与大小提取出来,通过调整输入信号频率,即可得到控制环路的带宽与相角裕度。
40.本发明未述及之处适用于现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

