1.本实用新型属于桥梁转体技术领域,具体说的是一种桥梁转体状态智能控制系统。
背景技术:
2.桥梁转体施工作为一种被广泛应用于跨越交通繁忙的铁路、高速公路、水深流急的峡谷、运输繁忙的航道的施工方法,为特殊条件下桥梁施工的安全、质量、进度提供可靠保证,转体施工技术以其经济、方便、可靠的特点愈来愈受到桥梁建设者的青睐。
3.桥梁转体施工作为一种技术含量较高的专业化施工方法,转体桥梁实施转体过程中的状态(转体姿态、转体速度、安全状态)一直是实施转体过程关注的重点。
4.转体桥梁由于梁体施工误差引起的不平衡力矩及转体牵引力不平衡引起的不平衡力矩通常会造成梁体姿态及平衡状态的改变,若不及时对梁体姿态进行控制调整,可能会影响转体施工的顺利进行及梁体安全。
5.现有梁体姿态调整方法通常在转体前采用吊车吊装配重块放置梁端预定位置、改变梁体重心从而使梁体姿态发生改变达到姿态调整的目的;桥梁转体在转动过程中无法对梁体的状态进行控制调整,一旦在梁体转动过程出现较为严重的倾斜,威胁桥梁转体安全时,则必须停止转体重新对梁体配重以对梁体姿态进行调整,从而造成在窗口期内无法完成转体而导致转体失败。
6.桥梁转体牵引通常采用液压连续千斤顶张拉预埋在转体上转盘的钢绞线而使梁体发生转动,在转体过程中采用自动控制牵引,在接近转体时则采用人工控制、点动方式进行;转体过程中状态监测(梁体倾斜、转动角度、转动距离)采用人工操作相关仪器进行测量,测量任务量大、数据不连续、效率低,不能实时反映桥梁转体时的状态,梁体接近终点时人工控制点动、测量程序反复繁琐、精确度低且存在过转风险。
7.因此,如何解决上述技术问题成为了该领域技术人员努力的方向。
技术实现要素:
8.为解决上述技术问题,本实用新型提供一种桥梁转体状态智能控制系统。
9.为实现上述技术目的,所采用的技术方案是:一种桥梁转体状态智能控制系统,包括用于桥梁梁体转体的转体球铰装置、用于保证桥梁梁体姿态平衡的姿态智能控制调整机构、用于驱动桥梁梁体转体的智能牵引机构、以及用于监测和控制的状态智能监测机构;
10.所述的转体球铰装置包括转体球铰、滑道 、撑脚和牵引索,具有转动功能的转体球铰设置在桥梁梁体的下方,在转体球铰的外侧设有滑道,在滑道上设有用于支撑桥梁梁体的撑脚,在转体球铰上连接有牵引索;
11.所述的姿态智能控制调整机构包括设置在桥梁梁体梁面上的平衡配重装置、设置在转体球铰上的竖向荷载传感器、设置在撑脚上的竖向倾角仪和应力应变仪;
12.所述的智能牵引机构包括设置在梁体上的梁部中线监测传感器、与牵引索的自由
端连接并进行拉动的液压动力组件、对液压动力组件进行供油的液压油源和设置在撑脚上的水平转角仪;
13.所述的状态智能监测机构由数据采集器和智能控制中心组成,数据采集器的信号输入端分别连接竖向荷载传感器、竖向倾角仪、应力应变仪、水平转角仪和梁部中线监测传感器,数据采集器的信号输出端与智能控制中心连接,智能控制中心根据竖向荷载传感器、竖向倾角仪、应力应变仪的信号信息,控制平衡配合装置在梁面上进行移动或停止,智能控制中心根据水平转角仪和梁部中线监测传感器的信号信息,控制液压动力组件带动转体球铰转动或停止。
14.液压动力组件为液压千斤顶或液压缠绕桩。
15.转体球铰包括上球铰、下球铰和销轴,上球铰和下球铰呈上下设置,其相对应的表面为相配合的球面,下球铰的球面上设有下摩擦滑板,在上球铰和下球铰的中心安装有销轴,多个竖向荷载传感器均布于下球铰的球面上,以下球铰中心为圆心按一层或多层同心圆放射状均匀分布,多个竖向荷载传感器与位于外部的数据采集器连接。
16.竖向荷载传感器的上端部设置有安装凹槽,安装凹槽内设置有摩擦滑板。
17.竖向荷载传感器通过联接螺栓与安装端盖相联接,安装端盖的外缘设置有外螺纹,下球铰的球面板上开设有内螺纹的螺纹凹槽,安装端盖通过螺纹配合与下球铰的球面板相联接,通过旋动安装端盖调节竖向荷载传感器高度。
18.安装端盖上设置有用于竖向荷载传感器的信号引线的引出的通孔。
19.安装端盖上设置有与内六角钣手相配合用于调节安装端盖位置的内六角凹槽。
20.应力应变仪设有三个,三个应力应变仪按撑脚的外径法线设置,并分别设置于撑脚的中部距底面距离的1/4、1/2及3/4处。
21.平衡配重装置为两个调整装置,两个调整装置分别设置在桥梁转体梁体的纵桥向两端上,调整装置包括轨道、轨道台车和配重块,轨道按纵桥向方向固定设置在桥梁梁体的表面上,在轨道上安装有可沿轨道移动的轨道台车,在轨道台车上固定有配重块。
22.本实用新型有益效果是:通过本实用新型,实现了桥梁梁体状态的智能控制调整及转体状态的可视化,可以有效提升桥梁转体的风险防控能力、转体精度及转体效率,满足了桥梁转体对转体状态智能控制调整及转体状态可视化的需求,提高了桥梁转体施工的安全性及现场观摩的体验。
23.将竖向荷载传感器置于转体球铰内,实现了转体球铰的竖向荷载的监测,监测更为准确合理,可以有效提升桥梁转体的风险防控能力,本实用新型满足了转体桥梁结构对测力型转体球铰的需求,提高了桥梁转体施工的安全性。
24.本装置实现了桥梁转体撑脚装置的应力应变实时监测功能,通过对三个应力应变仪的合理布局,可以及时了解掌握撑脚装置的受力状态,有效提升桥梁转体的风险防控能力。
25.利用平衡配重装置可实现实时重心调整,改变配重块的吊装不能实时调整,调整不准确等缺点,实现智能控制调整。
附图说明
26.图1为本实用新型的结构示意图;
27.图2为本实用新型的局部示意图;
28.图3为本实用新型的下球铰俯视示意图;
29.图4为本实用新型的转体球铰的结构示意图;
30.图5为本实用新型的竖向荷载传感器联接示意图;
31.图6为本实用新型的撑脚局部放大示意图;
32.图7为本实用新型的平衡配重装置俯视结构示意图;
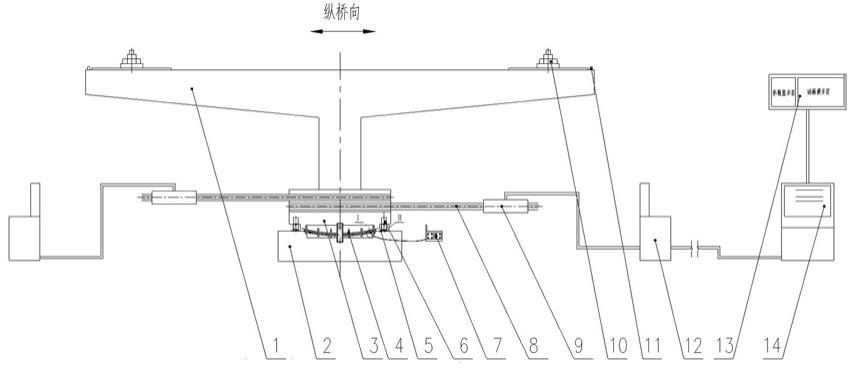
33.图中:1、桥梁梁体,2、下承台,3、上承台,4、转体球铰,5、滑道,6、撑脚,7、数据采集器,8、牵引索,9、液压动力组件,10、平衡配重装置,11、梁部中线监测传感器,12、液压油源,13、状态展示屏,14、智能控制中心,15、竖向荷载传感器,16、竖向倾角仪,17、水平转角仪,18、应力应变仪。19、轨道、20、轨道台车,21、配重块,22、安装端盖,23、上球铰,24、下球铰,25、上承台,26、下承台,27、销轴,28、摩擦滑板。
具体实施方式
34.下面结合附图对本实用新型加以说明,但是,本实用新型并不局限于本实施例。
35.一种桥梁转体状态智能控制系统,包括用于桥梁梁体转体的转体球铰装置、用于保证桥梁梁体姿态平衡的姿态智能控制调整机构、用于驱动桥梁梁体转体的智能牵引机构、以及用于监测和控制的状态智能监测机构。
36.如图1所示,转体球铰装置包括转体球铰4、滑道5 、撑脚6和牵引索8,具有转动功能的转体球铰4设置在桥梁梁体的下方,在转体球铰的外侧设有滑道5,在滑道上设有用于支撑桥梁梁体1的撑脚6,在上承台3上连接有牵引索8。滑道5与撑脚6的构成系统的防倾机构,当转体桥梁梁体发生倾斜时,防止梁体发生倾覆。牵引索8有两根,两根牵引索分别连接在上承台3上并相向缠绕,通过牵引索的拉动,利用转体球铰4带动桥梁梁体水平转动。
37.姿态智能控制调整机构包括设置在桥梁梁体梁面上的平衡配重装置10、设置在转体球铰上的竖向荷载传感器15、设置在撑脚上的竖向倾角仪和应力应变仪18。智能控制中心根据采集到竖向倾角仪16采集的梁体倾角状态、竖向荷载传感器15提供的竖向荷载分布状态及应力应变仪18提供的撑脚应力分布状态进行综合分析判断并控制平衡配重装置10在梁面上进行运动,从而改变梁体重心位置使转体球铰4发生竖向适度转动,从而达到梁体姿态智能控制调整的目的。
38.智能牵引机构包括设置在梁体上的梁部中线监测传感器11、与牵引索8的自由端连接并进行拉动的液压动力组件9、对液压动力组件进行供油的液压油源12和设置在撑脚上的水平转角仪17。牵引索8、液压动力组件与液压油源12构成系统转动的牵引动力机构,智能控制中心根据采集到转角状态及梁部中线状态进行综合分析判断并控制液压动力组件9 进行运动使转体球铰4发生水平转动,从而达到梁体转体智能牵引的目的。
39.状态智能监测机构由数据采集器7和智能控制中心14组成,数据采集器7的信号输入端分别连接竖向荷载传感器15、竖向倾角仪16、应力应变仪18、水平转角仪17和梁部中线监测传感器11,数据采集器的信号输出端与智能控制中心连接,智能控制中心根据竖向荷载传感器、竖向倾角仪、应力应变仪的信号信息,控制平衡配合装置在梁面上进行移动或停止,智能控制中心根据水平转角仪和梁部中线监测传感器的信号信息,控制液压动力组件带动转体球铰转动或停止。
40.液压动力组件9为液压千斤顶或液压缠绕桩,通过缠绕和拖动实现牵引。
41.如图2、图3、图4所示,转体球铰包括上球铰23、下球铰24和销轴27,上球铰23和下球铰24呈上下设置,其相对应的表面为相配合的球面,下球铰24的球面上设有下摩擦滑板,在上球铰23和下球铰24的中心安装有销轴27,多个竖向荷载传感器15均布于下球铰的球面上,多个竖向荷载传感器15均布于下球铰的球面上,竖向荷载传感器15的上表面高度不能高出下摩擦滑板,排布方式以下球铰中心为圆心按一层或多层同心圆放射状均匀分布,多个竖向荷载传感器与位于外部的数据采集器连接。
42.竖向荷载传感器的上端部设置有安装凹槽,安装凹槽内设置有摩擦滑板28。
43.如图5所示,竖向荷载传感器通过联接螺栓与安装端盖22相联接,安装端盖22的外缘设置有外螺纹,下球铰的球面板上开设有内螺纹的螺纹凹槽,安装端盖22通过螺纹配合与下球铰的球面板相联接,通过旋动安装端盖调节竖向荷载传感器高度。
44.安装端盖22上设置有用于竖向荷载传感器的信号引线的引出的通孔,便于竖向荷载传感器15的信号引线的引出。
45.安装端盖上设置有与内六角钣手相配合用于调节安装端盖位置的内六角凹槽,内六角凹槽可设置在通孔的下方,与通孔连通,通过特制的具有开口结构的内六角钣手与设置的内六角凹槽相配合,用以调节竖向荷载传感器15的安装位置。在全部安装后再将下球铰浇筑在下承台26内,将上球铰浇筑在上承台25内。
46.通过结构仿真分析研究下球铰分布的摩擦滑板各层间的应力分布规律并形成拟合函数。设置在特定点位的竖向荷载传感器可以采集到特定点位的局部荷载,通过对各测量点局部实测竖向荷载并利用拟合函数进行数据拟合,进而计算出转体球铰的整体竖向荷载。
47.如图6所示,应力应变仪设有三个,三个应力应变仪按撑脚的外径法线设置,并分别设置于撑脚的中部距底面距离的1/4、1/2及3/4处。三个应力应变仪的信号输出端与数据采集仪的信号采集端连接,即三个应力应变仪将采集到了三处应力信息传输给数据采集仪,应力应变仪与数据采集仪组成撑脚装置的应力应变监测系统,可以实时监测撑脚装置在竖向荷载作用下的结构变形情况及结构应力变化情况,为撑脚装置的安全状态评估分析提供依据。数据采集仪可显示各部位的应力信息,其内可集成报警装置,当某一部分信号值超出理论值范围,会发出警报,实现应力实时监测。
48.如图7所示,平衡配重装置为两个调整装置,两个调整装置分别设置在桥梁转体梁体的纵桥向两端上,调整装置包括轨道19、轨道台车20和配重块21,轨道按纵桥向方向固定设置在桥梁梁体的表面上,在轨道上安装有可沿轨道移动的轨道台车,在轨道台车上固定有配重块。
49.轨道19按预定的位置与梁面进行可靠地联接或锚固;轨道台车20按照设定的位置放置于轨道上,轨道台车20设置位置锁定机构能够使轨道台车在设定的坡度与轨道进行固定;配重块21按照预定的位置与数量分布于轨道台车上并可靠固定。
50.智能控制中心为plc控制系统,与轨道台车20的连接,可通过控制轨道台车20内电机的正反转实现,正转时轨道台车向一侧运动,反转时轨道台车20向另一侧倒退移动,当检测到梁体达到平衡状态,控制左右轨道台车停止移动,当检测到梁体为非平衡状态,控制轨道台车移动,直至梁体达到平衡状态。
51.智能控制装置通过有线或无线和轨道台车连接。
52.以上仅为本实用新型的优选实例而已,并不用于限制或限定本实用新型。对于本领域的研究或技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型所声明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

