x’y’,所述第一轨迹点和第二轨迹点分别为所述第一直线轨迹的两个端点,所述第二轨迹点和第三轨迹点分别为所述第二直线轨迹的两个端点,且所述局部坐标系o’x’y’中的y’轴由第一直线轨迹和第二直线轨迹的角平分线构成;
9.根据最大允许偏差、直线轨迹长度和最大允许速度获取过渡速度,使规划轨迹在第一预设点处以所述过渡速度开始过渡,并在第二预设点处以所述过渡速度结束过渡,所述第一预设点位于所述第一直线轨迹上,所述第二预设点位于所述第二直线轨迹上,且所述第一预设点和第二预设点关于y’轴对称;
10.在所述局部坐标系o’x’y’中根据所述过渡速度获得规划路径,并通过坐标变换获得所述规划路径在空间坐标系oxyz中的位置。
11.作为本发明实施例的进一步优化,所述根据最大允许偏差、直线轨迹长度和最大允许速度获取过渡速度,包括:
12.在所述局部坐标系o’x’y’内,获取进给速度在y’轴方向的最大加速度、最大加加速度;
13.根据进给速度在y’轴方向的最大加速度、最大加加速度以及进给速度获取所述规划轨迹与原轨迹的最大偏差和过渡点长度,所述原轨迹由所述第一直线轨迹和第二直线轨迹构成;
14.分别使用最大允许偏差对所述规划轨迹与原轨迹的最大偏差、使用直线轨迹长度对所述过渡点长度、以及使用最大允许速度对所述进给速度进行约束,获得所述过渡速度。
15.作为本发明实施例的进一步优化,在所述局部坐标系o’x’y’内,获取进给速度在y’轴方向的最大加速度、最大加加速度,包括:
16.根据以下计算式分别获取进给速度在y’轴方向的最大加速度和最大加加速度:
[0017][0018]
其中,a
x,max
、a
y,max
、a
z,max
分别为空间坐标系oxyz中x轴、y轴、z轴的最大加速度,j
x,max
、j
y,max
、j
z,max
分别为空间坐标系oxyz中x轴、y轴、z轴的最大加加速度,τ
x2
、τ
y2
、τ
z2
分别为y’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量。
[0019]
作为本发明实施例的进一步优化,在所述第一预设点和第二预设点之间,所述过渡速度在x’轴方向的分量保持不变,所述过渡速度在y’轴方向的分量按t型加减速方式增大。
[0020]
作为本发明实施例的进一步优化,所述根据
‘
进给速度在y’轴方向的最大加速度、最大加加速度以及进给速度获取所述规划轨迹与原轨迹的最大偏差和过渡点长度,包括:
[0021]
根据第一预设点的位置、第二预设点的位置、y’轴方向的最大加速度、y’轴方向的最大加加速度获取对应于进给速度的规划轨迹;
[0022]
根据第二直线轨迹与x’轴的夹角、最大偏差时刻及所述规划轨迹,获取所述规划轨迹与原轨迹的最大偏差以及直线轨迹长度。
[0023]
作为本发明实施例的进一步优化,在所述进给速度的y’轴分量包括匀加速过程时,所述最大偏差时刻为(t1 0.5
×
t2),且:
[0024][0025]
其中t1为进给速度在y’轴的分量的加加速时长,t2为进给速度在y’轴的分量的匀加速时长;
[0026]
在所述进给速度的y’轴分量不包括匀加速过程时,所述最大偏差时刻为(t1’
0.5
×
t2’
),且:
[0027][0028]
其中t1’
为进给速度在y’轴的分量的加加速时长,t2’
为进给速度在y’轴的分量的匀加速时长。
[0029]
作为本发明实施例的进一步优化,所述最大允许速度v
v,max
为:
[0030]
v
v,max
=min{|v
x,max
/τ
x1
|,|v
y,max
/τ
y1
|,|v
z,max
/τ
z1
|,|v
x,max
/τ
x2
|,|v
y,max
/τ
y2
|,|v
z,max
/τ
z2
|}
[0031]
其中,v
x,max
、v
y,max
、v
z,max
分别为空间坐标系oxyz中x轴、y轴、z轴的最大速度,τ
x1
、τ
y1
、τ
z1
分别为x’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量,τ
x2
、τ
y2
、τ
z2
分别为y’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量。
[0032]
作为本发明实施例的进一步优化,所述在所述第一轨迹点、第二轨迹点以及第三轨迹点所在的平面内建立局部坐标系o’x’y’,包括:
[0033]
分别获取所述第一直线轨迹的单位切矢和所述第二直线轨迹的单位切矢;
[0034]
根据所述第一直线轨迹的单位切矢和所述第二直线轨迹的单位切矢获取x’轴的单位向量和y’轴的单位向量,并根据所述x’轴的单位向量和y’轴的单位向量建立所述局部坐标系o’x’y’。
[0035]
本发明实施例还提供一种轨迹规划设备,包括存储器和处理器,所述存储器中存储有可在所述处理器中执行的计算机程序,且所述处理器执行所述计算机程序时实现如上所述的轨迹规划方法的步骤。
[0036]
本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如上所述的轨迹规划方法的步骤。
[0037]
本发明实施例具有以下有益效果:通过坐标变换同时实现了拐角的光顺以及各轴的运动规划,从而具有更高的轨迹处理效率。并且,本发明实施例仅需在局部坐标系中使用t型加减速规划y’轴的运动,整个过程计算量较少,因此计算效率高。
附图说明
[0038]
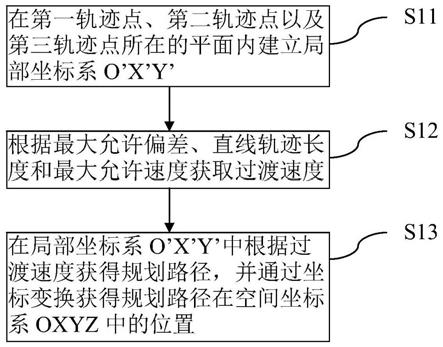
图1是本发明实施例提供的轨迹规划放方法的流程示意图;
[0039]
图2是本发明实施例提供的轨迹规划放方法中,第一轨迹点、第二轨迹点及第三轨迹点在空间坐标系oxyz中位置的示意图;
[0040]
图3是本发明实施例提供的轨迹规划放方法中,局部坐标系o’x’y’的示意图;
[0041]
图4是本发明实施例提供的轨迹规划放方法中建立局部坐标系的流程示意图;
[0042]
图5是本发明实施例提供的轨迹规划放方法中获取过渡速度的流程示意图;
[0043]
图6是本发明实施例提供的轨迹规划放方法中,规划轨迹在局部坐标系o’x’y’中的示意图;
[0044]
图7是本发明实施例提供的轨迹规划放方法中,规划轨迹在空间坐标系oxyz中的示意图;
[0045]
图8是本发明实施例提供的轨迹规划放方法中,过渡速度在空间坐标系oxyz的x轴、y轴、z轴的速度、加速度、加加速度的曲线示意图;
[0046]
图9是本发明实施例提供的轨迹规划放设备的示意图。
具体实施方式
[0047]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0048]
本发明实施例的轨迹规划方法可应用于数控系统或机器人控制系统,并用于实现运动轨迹插补。结合图1所示,本实施例的轨迹规划方法可对空间坐标系oxyz中依次连续的第一轨迹点p
i
‑1、第二轨迹点p
i
及第三轨迹点p
i 1
之间的轨迹和进给速度进行规划,具体地,上述第一轨迹点p
i
‑1、第二轨迹点p
i
及第三轨迹点p
i 1
可以为复杂曲面离散形成的直线轨迹的端点,其中第一轨迹点p
i
‑1和第二轨迹点p
i
分别为第一直线轨迹p
i
‑1p
i
的两个端点,第二轨迹点p
i
和第三轨迹点p
i 1
则分别为第二直线轨迹p
i
p
i 1
的两个端点,且第一直线轨迹p
i
‑1p
i
和第二直线轨迹p
i
p
i 1
相交于第二轨迹点p
i
。如图2,为i=1时,第一轨迹点p
i
‑1、第二轨迹点p
i
及第三轨迹点p
i 1
的示意图。
[0049]
本实施例的轨迹规划方法可在cnc系统的主控设备执行,该主控设备可从cam系统获取由复杂曲面离线形成的直线段,且该方法包括:
[0050]
步骤s11:在第一轨迹点p
i
‑1、第二轨迹点p
i
及第三轨迹点p
i 1
所在的平面内建立局部坐标系o’x’y’,上述第一轨迹点p
i
‑1、第二轨迹点p
i
及第三轨迹点p
i 1
可从cam系统获取,其中第一轨迹点p
i
‑1和第二轨迹点p
i
分别为第一直线轨迹p
i
‑1p
i
的两个端点,第二轨迹点p
i
和第三轨迹点p
i 1
则分别为第二直线轨迹p
i
p
i 1
的两个端点,且第一直线轨迹p
i
‑1p
i
和第二直线轨迹p
i
p
i 1
相交于第二轨迹点p
i
。上述局部坐标系o’x’y’中的y’轴由第一直线轨迹p
i
‑1p
i
和第二直线轨迹p
i
p
i 1
的角平分线构成。
[0051]
结合图4所示,在局部坐标系o’x’y’中,y’轴为∠p
i
‑1p
i
p
i 1
(i=1)的角平分线,其正方向指向锐角∠p
i
‑1p
i
p
i 1
的内侧;x’轴垂直于y’轴,其正方向指向进给方向。
[0052]
步骤s12:根据最大允许偏差、直线轨迹长度和最大允许速度获取过渡速度,使规划轨迹在第一预设点p
is
处以过渡速度开始过渡,并在第二预设点处p
ie
以过渡速度结束过渡,其中第一预设点p
is
位于第一直线轨迹p
i
‑1p
i
上,第二预设点p
ie
位于第二直线轨迹p
i
p
i 1
上,且第一预设点p
is
和第二预设点p
ie
关于y’轴对称。
[0053]
在该步骤中,假设进给速度在第一直线轨迹p
i
‑1p
i
上点p
is
处以过渡速度v
i
开始过渡,在第二直线轨迹p
i
p
i 1
的点p
ie
处以相同的过渡速度v
i
结束过渡,且设定进给速度在x’轴
上的分量速度在第一预设点p
is
和第二预设点p
ie
之间以匀速运动,进给速度在y’的分量速度在p
is
和p
ie
以t型加减速进行纯加速运动。然后再通过最大允许偏差、直线轨迹长度、最大允许速度等约束因素,可计算获得过渡速度v
i
的值。
[0054]
步骤s13:在局部坐标系o’x’y’中根据过渡速度获得规划路径,并通过坐标变换获得规划路径在空间坐标系oxyz中的位置。
[0055]
在该步骤中,需在局部坐标系o’x’y’内根据过渡速度v
i
获取规划轨迹在局部坐标系o’x’y’中的位置,再通过坐标变换可获得坐标系oxyz空间内x轴,y轴和z轴的位置,从而实现轨迹过渡与速度规划合二为一。
[0056]
上述轨迹规划方法,通过在局部坐标系中进行运动规划,再通过巧妙的坐标变换同时实现了拐角的光顺以及各轴的运动规划,将现有方法的轨迹光顺和速度规划合二为一,具有更高的轨迹处理效率。
[0057]
结合图4所示,在本发明的一个实施例中,图1中的步骤s11,即在第一轨迹点p
i
‑1、第二轨迹点p
i
及第三轨迹点p
i 1
所在的平面内建立局部坐标系o’x’y’,具体包括:
[0058]
步骤s111:分别获取第一直线轨迹p
i
‑1p
i
的单位切矢和第二直线轨迹p
i
p
i 1
的单位切矢。
[0059]
在该步骤中,可先计算第一直线轨迹p
i
‑1p
i
和第二直线轨迹p
i
p
i 1
的单位切矢t
i
‑1和t
i
为:
[0060][0061]
其中符号“||||”表示向量的模长计算。
[0062]
步骤s112:根据第一直线轨迹p
i
‑1p
i
的单位切矢t
i
‑1和第二直线轨迹p
i
p
i 1
的单位切矢t
i
获取x’轴的单位向量和y’轴的单位向量,并根据x’轴的单位向量和y’轴的单位向量建立局部坐标系o’x’y’。
[0063]
具体地,可通过以下计算式(2)获得单位向量x’和y’:
[0064][0065]
然后,再以p
i
为原点(即o’)、单位向量x’作为x’轴、单位向量y’作为y’轴建立局部坐标系o’x’y’。
[0066]
结合图5所示,在本发明的一个实施例中,图1中的步骤s12,即根据最大允许偏差、直线轨迹长度和最大允许速度获取过渡速度,具体包括:
[0067]
步骤s121:在局部坐标系o’x’y’内,获取进给速度在y’轴方向的最大加速度、最大加加速度。
[0068]
具体地,可先通过以下计算式(3)获得第二直线轨迹p
i
p
i 1
与x’轴的夹角θ
i
:
[0069]
θ
i
=arccos(〈t
i
,x
′
〉)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0070]
当进给速度在第一直线轨迹p
i
‑1p
i
上的第一预设点p
is
处以过渡速度v
i
开始过渡,在第二直线轨迹p
i
p
i 1
上的第二预设点p
ie
处以相同的过渡速度v
i
结束过渡,且第一预设点p
is
和第二预设点p
ie
关于y’轴对称,则在局部坐标系o’x’y’中,规划轨迹在x’轴的始末速度
v
x’s
和v
x’e
分别为:
[0071][0072]
y’轴的始末速度v
y’s
和v
y’e
分别为:
[0073][0074]
令过渡点长度l
ci
=||p
is
‑
p
i
||=||p
ie
‑
p
i
||,则在局部坐标系o’x’y’中,规划轨迹在x’轴的始末位置x
s’和x
e’分别为:
[0075][0076]
规划轨迹在y’轴的始末位置y
s’和y
e’分别为:
[0077][0078]
在局部坐标系o’x’y’中,由于v
x’s
=v
x’e
且v
y’s
≠v
y’e
,令进给速度在x’轴上的分量在x
s’和x
e’之间以速度v
x’s
匀速运动,令进给速度在y’轴上的分量在y
s’和y
e’之间进行由速度v
y’s
加速到速度v
y’e
的加速运动。若在空间坐标系oxyz中的x轴、y轴和z轴的最大加速度分别为a
x,max
、a
y,max
、a
z,max
,最大加加速度分别为j
x,max
、j
y,max
、j
z,max
,若单位向量y’在空间坐标系oxyz中的x轴、y轴和z轴的坐标分量分别为τ
x2
、τ
y2
、τ
z2
,则进给速度在y’轴的最大加速度a
y’,max
和最大加加速度j
y’,max
分别为:
[0079][0080]
步骤s122:根据第二直线轨迹p
i
p
i 1
与x’轴的夹角、进给速度在y’轴方向的最大加速度最大加加速度以及进给速度获取规划轨迹与原轨迹的最大偏差和过渡点长度,其中原轨迹由第一直线轨迹p
i
‑1p
i
和第二直线轨迹p
i
p
i 1
构成。
[0081]
由于在第一预设点p
is
和第二预设点p
ie
之间,进给速度在x’轴方向的分量保持不变,在y’轴方向的分量按t型加减速方式增大。当进给速度在y’轴方向的分量先加加速运行t1时长,再匀速运行t2时长,最后减加速运行t1时长,相应地,规划轨迹的坐标随时间t变化的函数可表示为:
[0082][0083]
x’轴和y’轴运动的合成轨迹(即规划轨迹)与原轨迹(即第一直线轨迹p
i
‑1p
i
和第二直线轨迹p
i
p
i 1
)的最大偏差为x’轴坐标为0时刻的y’轴坐标值,即当t=t1 0.5
×
t2时,规划轨迹与原轨迹偏差最大,此时x’轴和y’轴位置x
mid’和y
mid’分别为:
[0084][0085]
由于在局部坐标系o’x’y’中,点p
i
坐标为(0,0),点(x
mid’,y
mid’)与点p
i
的距离为规划轨迹与原轨迹的最大偏差,则最大偏差为:
[0086][0087]
步骤s123:分别使用最大允许偏差对规划轨迹与原轨迹的最大偏差、使用直线轨迹长度对过渡点长度、以及使用最大允许速度对所述进给速度进行约束,获得过渡速度。
[0088]
在该步骤中,若定义最大允许偏差为δ
tol
(该值可预先设置),则需要满足:
[0089]
δ
max
≤δ
tol
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0090]
并且为了保证相邻拐角不干涉,直线轨迹长度不能超过拐角前后直线轨迹的允许过渡长度,即:
[0091]
l
ci
≤min(l
i
‑
1,tol
,l
i,tol
)=l
ci,min
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0092]
其中l
i
‑
1,tol
为第一直线轨迹p
i
‑1p
i
的允许过渡长度,l
i,tol
为第二直线轨迹p
i
p
i 1
的允许过渡长度。
[0093]
在本发明的一个实施例中,当过渡速度v
i
较大,即进给速度的y’轴分量包括匀加速过程时,最大偏差时刻(t1 0.5
×
t2)中的t1、t2满足:
[0094][0095]
此时,计算式(11)可转换为;
[0096][0097]
由以上不等式(14)可得:
[0098]
[0099]
上式(15)中,若根号内值小于0或则按进给速度的y’轴分量不包括匀加速过程重新计算v
i,max
。
[0100]
同时,根据计算式(12)可得:
[0101][0102]
解以上不等式(16)可得:
[0103][0104]
类似的,上式(17)中,若根号内值小于0或则按进给速度的y’轴分量不包括匀加速过程重新计算v
i,max
。
[0105]
在本发明的另一实施例中,当过渡速度v
i
较小,即进给速度的y’轴分量不包括匀加速过程时,最大偏差时刻(t1 0.5
×
t2)中的t1、t2满足:
[0106][0107]
此时,计算式(11)可转换为;
[0108][0109]
由以上不等式(19)可得:
[0110][0111]
同样为了保证相邻拐角不干涉,得到以下不等式:
[0112][0113]
解以上不等式(21)可得:
[0114][0115]
在根据计算式(15)或(20)获得v
i,max
以及根据计算式(17)或(22)获得v
l,max
之后,再结合y’轴的最大允许速度v
v,max
对过渡速度v
i
进行约束:
[0116]
v
v,max
=min{|v
x,max
/τ
x1
|,|v
y,max
/τ
y1
|,|v
z,max
/τ
z1
|,|v
x,max
/τ
x2
|,|v
y,max
/τ
y2
|,|v
z,max
/τ
z2
}}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(23)
[0117][0118]
其中,v
x,max
、v
y,max
、v
z,max
分别为空间坐标系oxyz中x轴、y轴、z轴的最大速度,τ
x1
、τ
y1
、τ
z1
分别为x’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量,τ
x2
、τ
y2
、τ
z2
分别为y’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量。
[0119]
即最大的过渡速度v
i
为:
[0120]
v
i
=min{v
i,max
,v
l,max
,v
v,max
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24)
[0121]
再根据最大的过渡速度v
i
计算t1和t2,若则t1和t2计算为:
[0122][0123]
否则t1和t2计算为:
[0124][0125]
在获得v
i
、t1、t2之后,在图1的步骤s13可以实时计算出局部坐标系o’x’y’中规划轨迹在x’轴和y’轴的位置x’(t)和y’(t),并构建变换矩阵m为:
[0126][0127]
其中,τ
x1
、τ
y1
、τ
z1
分别为x’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量,τ
x2
、τ
y2
、τ
z2
分别为y’轴的单位向量在空间坐标系oxyz中x轴、y轴、z轴的坐标分量,τ
x3
、τ
y3
、τ
z3
分别为z’=x
’×
y’在空间坐标系oxyz中x轴、y轴、z轴的坐标分量。相应地,规划轨迹在空间坐标系oxyz中的各轴的位置可通过以下计算式表示:
[0128][0129]
例如结合图2、3、6、7、8所示,取i=1,且第一轨迹点p0在空间坐标系oxyz中的坐标为(0,0,0)、第二轨迹点p1在空间坐标系oxyz中的坐标为(5,10,0)、第三轨迹点p2在空间坐标系oxyz中的坐标为(15,10,10),根据本发明实施例的方法规划的规划轨迹71与原轨迹的最大偏差为2mm,与预先设定的最大允许偏差δ
tol
一致。从图8可知,各轴的速度、加速度和加加速度均在允许范围内,且实际进给速度无需在拐角处降速过多。由此可知,本发明实施例的方法实现了在速度规划的同时完成了拐角的光顺,并能确保各轴运动参数在允许范围内,且整个过程计算简单,具有较高的计算效率。
[0130]
本发明实施例还提供一种轨迹规划设备,该轨迹规划设备可由cnc系统中的主控设备构成,并可实现插补操作。本实施例的轨迹规划设备9包括存储器91和处理器92,其中存储器91中存储有可在处理器92中执行的计算机程序,且处理器92执行所述计算机程序时实现如图1
‑
8实施例所述的轨迹规划方法的步骤。
[0131]
本实施例中的轨迹规划设备与上述图1
‑
8对应实施例中的轨迹规划方法属于同一构思,其具体实现过程详细见对应的方法实施例,且方法实施例中的技术特征在本设备实施例中均对应适用,这里不再赘述。
[0132]
本发明的一个实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如上所述的轨迹规划方法。
[0133]
本实施例中的计算机可读存储介质与上述图1
‑
8对应实施例中的轨迹规划方法属于同一构思,其具体实现过程详细见对应的方法实施例,且方法实施例中的技术特征在本设备实施例中均对应适用,这里不再赘述。
[0134]
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
[0135]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。
[0136]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本技术的范围。
[0137]
在本技术所提供的实施例中,应该理解到,所揭露的轨迹规划方法、及设备,可以通过其它的方式实现。
[0138]
本技术实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读介质可以包括:能够携带所述计算机程序代码的任何实体或界面切换设备、记录介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器(read
‑
only memory,rom)、随机存取存储器(random access memory,ram)、电载波信号、电信信号以及软件分发介质等。需要说明的是,所述计算机可读介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读介质不包括是电载波信号和电信信号。
[0139]
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。此外,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

