1.本发明涉及一种航天器交会对接最后逼近段相对轨道与姿态跟踪控制方法,属于航天器控制技术领域。
背景技术:
2.随着空间技术的快速发展,如何实现跟踪航天和目标航天器的交会对接,是完成在轨清理、维修及空间加注等任务的重要保障。此外,在实际空间交会对接操作中,往往要求跟踪航天器与目标航天器相对轨道与姿态控制误差具有指定的暂态和稳态性能,因此,如何实现考虑执行机构饱和约束的相对轨道与姿态预设性能控制,是交会对接任务的一项关键技术。
3.传统的交会对接控制方法大多将重点放在控制系统的稳态性能的研究上,即保证跟踪航天器与目标航天器之间的相对轨道和相对姿态跟踪误差收敛到一个有界的区域或渐进收敛至平衡点,而对跟踪误差收敛过程的暂态性能(包括超调量和收敛速度)的研究则相对较少。鉴于此,有学者提出了一种预设性能控制的概念,预设性能设计方法要求跟踪误差必须收敛到预先定义的任意小的残差内,同时,收敛速度、超调量必须保证满足之前设置的条件。其中,预设性能指标通过性能函数来描述,通过引入误差转换,将系统满足预设性能的问题转化为新的误差的有界性问题。该技术在航天领域也受到了广泛的关注。然而,上述技术仍然存在技术缺陷,即传统的预设性能设计方法对系统跟踪误差初值有依赖性,使得预设性能的应用受到一定的限制。此外,在实际交会对接任务中由于推力器、控制力矩陀螺、动量轮等执行机构的物理结构限制,使得相对轨道与姿态控制系统存在控制控制饱和非线性,控制系统处于饱和状态下会导致闭环系统控制性能降低,甚至破坏系统的稳定性,因此针对交会对接任务有必要提出一种考虑执行机构饱和约束同时具有预设性能的相对轨道与姿态耦合控制方法。
技术实现要素:
4.本发明解决的技术问题是:针对目前现有技术中存在的不足,提出了一种航天器交会对接最后逼近段相对轨道与姿态跟踪控制方法,既兼顾了相对轨道与姿态跟踪系统的暂态性能和稳态性能,同时考虑了执行机构的饱和约束,保证交会对接任务的顺利实现。
5.本发明解决上述技术问题是通过如下技术方案予以实现的:
6.一种航天器交会对接最后逼近段相对轨道与姿态跟踪控制方法,步骤如下:
7.(1)考虑执行机构饱和约束的情况,建立跟踪航天器与目标航天器间六自由度交会对接模型;
8.跟踪航天器与目标航天器间六自由度交会对接模型包括两个航天器间相对轨道与相对姿态跟踪控制运动学模型、动力学模型;
9.(2)根据交会对接任务中相对轨道与姿态跟踪控制误差的暂态和稳态性能指标要
求,设计相对轨道与姿态跟踪误差性能函数;
10.(3)根据步骤(2)所得误差性能函数构造转换误差变量,并利用转换误差变量构造相对轨道与姿态跟踪控制器的中间误差变量;
11.(4)根据步骤(1)所得相对姿态跟踪控制运动学模型及动力学模型与步骤(3)所得中间误差变量设计相对轨道与姿态虚拟控制量,利用所得相对轨道与姿态虚拟控制量计算相对轨道与姿态虚拟控制量的导数;
12.(5)利用步骤(1)所得相对姿态跟踪控制运动学模型及动力学模型、步骤(3)所得中间误差变量、步骤(4)所得相对轨道与姿态虚拟控制量的导数,构建抗饱和预设性能交会对接控制器,通过构建自适应律对跟踪航天器质量、转动惯量矩阵分量与控制器设计所需的辅助变量进行估计。
13.步骤(1)中,跟踪航天器与目标航天器间六自由度交会对接模型的建模过程具体为:
14.(1
‑
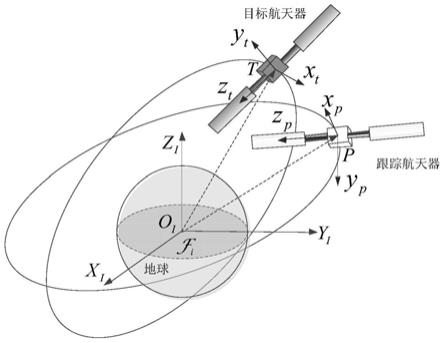
1)分别建立跟踪航天器和目标航天器的相关坐标系,为惯性坐标系,为跟踪航天器的本体坐标系,为目标航天器的本体坐标系;
15.(1
‑
2)建立两个航天器间相对轨道与相对姿态跟踪控制运动学模型、动力学模型,具体为:
[0016][0017][0018]
式中,为用修正罗德里格斯参数描述的姿态跟踪误差,为姿态跟踪误差,为轨道器转动惯量矩阵,与分别表示干扰力矩与控制力矩;
[0019]
相对姿态动力学模型中矩阵g(σ
e
)、c
a
和非线性向量h
a
具体为:
[0020][0021]
c
a
=s(j(ω
e
r(σ
e
)ω
t
))
‑
s(r(σ
e
)ω
t
)j
‑
js(r(σ
e
)ω
t
)
[0022][0023]
跟踪航天器与目标航天器相对轨道跟踪运动学与动力学模型分别为:
[0024][0025][0026]
式中,与分别表示相对轨道与速度跟踪误差,m为轨道器质量,与分别表示轨道器与上升器的角速度,满足ω
e
=ω
s
‑
r(σ
e
)ω
t
,与分别表示干扰力与控制力。s(
·
)为叉乘算子,h
p
为相对轨道动力学模型中非线性向量。
[0027]
对于任意三维向量γ=[γ
1 γ
2 γ3]
t
,s(γ)具体为:
[0028][0029]
相对轨道动力学模型中非线性向量h
p
具体为:
[0030][0031]
控制力矩与控制力分别存在幅值上限τ
max
与f
max
,此时τ
i
与f
i
(i=1,2,3)分别满足:
[0032][0033][0034]
步骤(2)中,相对轨道与姿态跟踪误差性能函数具体为:
[0035][0036][0037]
式中,ρ
pi∞
与ρ
σi∞
分别为相对轨道跟踪误差与姿态跟踪误差稳态精度指标,l
pi
和l
σi
分别约束相对轨道与姿态跟踪误差的收敛速度,κ
σ
与κ
p
均为正常数。
[0038]
步骤(3)中,转换误差变量具体为:
[0039][0040][0041]
式中,δ
ui
与δ
li
分别为性能边界约束系数;
[0042]
利用转换误差变量构造相对轨道与姿态跟踪控制器的中间误差变量具体为:
[0043]
[0044][0045]
式中,α
σ
和α
p
均为待设计的虚拟控制量,ξ
σ1
,ξ
σ2
和ξ
p1
,ξ
p2
均为待设计的辅助补偿信号,其中:
[0046][0047][0048]
式中,k
σ1
,k
σ21
,k
σ2
和k
p1
,k
p21
,k
p2
均为正定矩阵,δτ=τ
‑
τ
c
,δf=f
‑
f
c
。
[0049]
步骤(4)中,相对轨道与姿态虚拟控制量具体为:
[0050][0051][0052]
式中,k1,k
σ1
,k
σ21
与k3,k
p1
,k
p21
均为对称正定矩阵。与分别为:
[0053][0054][0055]
相对轨道与姿态虚拟控制量的导数估计值和分别为:
[0056][0057][0058]
式中,ζ1,ζ2与ω
n1
,ω
n2
分别为命令滤波器增益与阻尼比。
[0059]
步骤(5)中,抗饱和预设性能交会对接控制器具体为:
[0060]
[0061]
式中,k2,k
σ2
,k
σ21
和k4,k4,k
p21
均为对称正定矩阵;
[0062]
辅助变量k
σ
与k
p
的自适应律分别为:
[0063][0064][0065]
式中,b
σ
,b
σ1
,b
σ2
和b
p
,b
p1
,b
p2
均为正常数,与的自适应律分别为:
[0066][0067]
式中,γ1和γ2均为正定矩阵,proj(
·
)为投影算子,k
σ
为正常数,具体为:
[0068][0069][0070][0071]
所述为线性算子,对于任意向量α=[a
1 a
2 a3]
t
:
[0072][0073]
其中,与的自适应律分别为:
[0074][0075]
式中,γ3与k
p
均为正常数,γ4均为正定矩阵。
[0076]
本发明与现有技术相比的优点在于:
[0077]
本发明提供的一种航天器交会对接最后逼近段相对轨道与姿态跟踪控制方法,通过构造相对轨道与姿态跟踪误差性能函数,放宽了对初始跟踪误差已知的限制,利用预设性能的设计思想来实现兼顾精细稳态与暂态控制,同时在考虑预设稳态和暂态性能的同时兼顾了执行机构的饱和约束,克服了传统预设性能控制方法依赖跟踪误差初值的缺点,为了解决现有预设性能控制方案中控制器设计对系统跟踪误差初值有依赖性、不能保证满足实际交会对接任务中推力器、控制力矩陀螺、动量轮等执行机构的物理结构限制,工程实现性强。
附图说明
[0078]
图1为发明提供的坐标系建立示意图;
[0079]
图2为发明提供的考虑执行机构饱和约束的抗饱和预设性能相对轨道与姿态跟踪控制方法流程框图;
[0080]
图3为发明提供的相对轨道跟踪误差x轴分量曲线;
[0081]
图4为发明提供的相对轨道跟踪误差y轴分量曲线;
[0082]
图5为发明提供的相对轨道跟踪误差z轴分量曲线;
[0083]
图6为发明提供的相对姿态跟踪误差x轴分量曲线;
[0084]
图7为发明提供的相对姿态跟踪误差y轴分量曲线;
[0085]
图8为发明提供的相对姿态跟踪误差z轴分量曲线;
具体实施方式
[0086]
一种航天器交会对接最后逼近段相对轨道与姿态跟踪控制方法,通过构造一种新的性能函数,放宽了对初始跟踪误差已知的限制,利用预设性能的设计思想来实现兼顾精细稳态与暂态控制,在考虑预设稳态和暂态性能的同时兼顾了执行机构的饱和约束。
[0087]
首先建立了交会对接任务中最后逼近段追踪航天器与目标航天器间的相对轨道与姿态跟踪动力学与运动学模型,考虑了模型不确定性、外界环境干扰、执行机构饱和约束。然后,分别设计不依赖初值的性能边界来约束相对轨道跟踪误差与相对姿态跟踪误差。同时,设计辅助补偿信号来解决执行机构的控制约束难题,最后设计自适应更新律来估计模型不确定性,并由此得到最终的追踪航天器与目标航天器间的相对轨道与姿态跟踪控制律,具体步骤如下:
[0088]
(1)考虑执行机构饱和约束的情况,建立跟踪航天器与目标航天器间六自由度交会对接模型;
[0089]
跟踪航天器与目标航天器间六自由度交会对接模型包括两个航天器间相对轨道与相对姿态跟踪控制运动学模型、动力学模型;
[0090]
其中,跟踪航天器与目标航天器间六自由度交会对接模型的建模过程具体为:
[0091]
(1
‑
1)分别建立跟踪航天器和目标航天器的相关坐标系,为惯性坐标系,为跟踪航天器的本体坐标系,为目标航天器的本体坐标系;
[0092]
(1
‑
2)建立两个航天器间相对轨道与相对姿态跟踪控制运动学模型、动力学模型,具体为:
[0093][0094][0095]
式中,为用修正罗德里格斯参数描述的姿态跟踪误差,为姿态跟踪误差,为轨道器转动惯量矩阵,与分别表示干扰力矩与控制力矩;
[0096]
相对姿态动力学模型中矩阵g(σ
e
)、c
a
和非线性向量h
a
具体为:
[0097][0098]
c
a
=s(j(ω
e
r(σ
e
)ω
t
))
‑
s(r(σ
e
)ω
t
)j
‑
js(r(σ
e
)ω
t
)
[0099][0100]
跟踪航天器与目标航天器相对轨道跟踪运动学与动力学模型分别为:
[0101][0102][0103]
式中,与分别表示相对轨道与速度跟踪误差,m为轨道器质量,与分别表示轨道器与上升器的角速度,满足ω
e
=ω
s
‑
r(σ
e
)ω
t
,与分别表示干扰力与控制力。s(
·
)为叉乘算子,h
p
为相对轨道动力学模型中非线性向量;
[0104]
进一步的,对于任意三维向量γ=[γ
1 γ
2 γ3]
t
,s(γ)具体为:
[0105][0106]
相对轨道动力学模型中非线性向量h
p
具体为:
[0107][0108]
控制力矩与控制力分别存在幅值上限τ
max
与f
max
,此时τ
i
与f
i
(i=1,2,3)分别满足:
[0109][0110][0111]
(2)根据交会对接任务中相对轨道与姿态跟踪控制误差的暂态和稳态性能指标要求,设计相对轨道与姿态跟踪误差性能函数;
[0112]
其中,相对轨道与姿态跟踪误差性能函数具体为:
[0113][0114][0115]
式中,ρ
pi∞
与ρ
σi∞
分别为相对轨道跟踪误差与姿态跟踪误差稳态精度指标,l
pi
和l
σi
分别约束相对轨道与姿态跟踪误差的收敛速度,κ
σ
与κ
p
均为正常数;
[0116]
(3)根据步骤(2)所得误差性能函数构造转换误差变量,并利用转换误差变量构造相对轨道与姿态跟踪控制器的中间误差变量;
[0117]
其中,转换误差变量具体为:
[0118][0119][0120]
式中,δ
ui
与δ
li
分别为性能边界约束系数;
[0121]
利用转换误差变量构造相对轨道与姿态跟踪控制器的中间误差变量具体为:
[0122][0123][0124]
式中,α
σ
和α
p
均为待设计的虚拟控制量,ξ
σ1
,ξ
σ2
和ξ
p1
,ξ
p2
均为待设计的辅助补偿信号,其中:
[0125][0126][0127]
式中,k
σ1
,k
σ21
,k
σ2
和k
p1
,k
p21
,k
p2
均为正定矩阵,δτ=τ
‑
τ
c
,δf=f
‑
f
c
;
[0128]
(4)根据步骤(1)所得相对姿态跟踪控制运动学模型及动力学模型与步骤(3)所得中间误差变量设计相对轨道与姿态虚拟控制量,利用所得相对轨道与姿态虚拟控制量计算相对轨道与姿态虚拟控制量的导数;
[0129]
其中,相对轨道与姿态虚拟控制量具体为:
[0130][0131][0132]
式中,k1,k
σ1
,k
σ21
与k3,k
p1
,k
p21
均为对称正定矩阵。与分别为:
[0133][0134][0135]
相对轨道与姿态虚拟控制量的导数估计值和分别为:
[0136][0137][0138]
式中,ζ1,ζ2与ω
n1
,ω
n2
分别为命令滤波器增益与阻尼比;
[0139]
(5)利用步骤(1)所得相对姿态跟踪控制运动学模型及动力学模型、步骤(3)所得中间误差变量、步骤(4)所得相对轨道与姿态虚拟控制量的导数,构建抗饱和预设性能交会对接控制器,通过构建自适应律对跟踪航天器质量、转动惯量矩阵分量与控制器设计所需的辅助变量进行估计。
[0140]
其中,抗饱和预设性能交会对接控制器具体为:
[0141][0142]
式中,k2,k
σ2
,k
σ21
和k4,k4,k
p21
均为对称正定矩阵;
[0143]
辅助变量k
σ
与k
p
的自适应律分别为:
[0144][0145][0146]
式中,b
σ
,b
σ1
,b
σ2
和b
p
,b
p1
,b
p2
均为正常数,与的自适应律分别为:
[0147][0148]
式中,γ1和γ2均为正定矩阵,proj(
·
)为投影算子,k
σ
为正常数,具体为:
[0149][0150][0151][0152]
为线性算子,对于任意向量α=[a
1 a
2 a3]
t
:
[0153][0154]
其中,与的自适应律分别为:
[0155][0156]
式中,γ3与k
p
均为正常数,γ4均为正定矩阵。
[0157]
下面结合具体实施例进行进一步说明:
[0158]
在本实施例中,如图1、图2所示,针对交会对接任务中跟踪航天器与目标航天器间的相对轨道与姿态跟踪控制问题提出了一种抗饱和预设性能控制方法,具体步骤为:
[0159]
(1)在考虑执行机构饱和约束的情况下,建立跟踪航天器与目标航天器间六自由度交会对接模型,该模型包含两个航天器之间的相对轨道和相对姿态跟踪控制运动学与动力学。
[0160][0161][0162]
式中,为用修正罗德里格斯参数描述的姿态跟踪误差,为姿态跟踪误差,为轨道器转动惯量矩阵,与分别表示干扰力矩与控制力矩,由于实际执行机构物理结构的限制,导致控制力矩存在幅值上限τ
max
,即
[0163][0164]
相对姿态动力学模型中矩阵g(σ
e
)、c
a
和非线性向量h
a
分别表示为
[0165][0166]
c
a
=s(j(ω
e
r(σ
e
)ω
t
))
‑
s(r(σ
e
)ω
t
)j
‑
js(r(σ
e
)ω
t
)
[0167][0168]
相对轨道跟踪控制系统的运动学与动力学模型分别为:
[0169][0170][0171]
式中,与分别表示相对轨道与速度跟踪误差,m为轨道器质量,
与分别表示轨道器与上升器的角速度,满足ω
e
=ω
s
‑
r(σ
e
)ω
t
,与分别表示干扰力与控制力,由于实际执行机构物理结构的限制,导致控制力存在幅值上限f
max
,即
[0172][0173]
相对轨道动力学模型中非线性向量h
p
为
[0174][0175]
s(
·
)为叉乘算子,定义:对于任意三维向量γ=[γ
1 γ
2 γ3]
t
,s(γ)为
[0176][0177]
(2)根据交会对接任务中相对轨道与姿态跟踪控制误差的暂态和稳态性能指标要求,设计相对轨道与姿态跟踪误差性能函数。
[0178][0179][0180]
式中,ρ
pi∞
与ρ
σi∞
分别表示相对轨道跟踪误差与姿态跟踪误差稳态精度指标,l
pi
和l
σi
分别约束相对轨道与姿态跟踪误差的收敛速度,κ
σ
与κ
p
均为正常数。
[0181]
(3)基于步骤(2)的相对轨道与姿态跟踪误差性能函数构造转换误差变量;
[0182][0183][0184]
式中,δ
ui
与δ
li
分别为性能边界约束系数,一般取1。
[0185]
(4)基于步骤(3)的相对轨道与姿态转换误差变量构造用于后续相对轨道与姿态跟踪控制器设计的中间误差变量;
[0186][0187][0188]
式中,α
σ
和α
p
均为待设计的虚拟控制量,ξ
σ1
,ξ
σ2
和ξ
p1
,ξ
p2
均为待设计的辅助补偿信号,分别满足
[0189][0190][0191]
式中,k
σ1
,k
σ21
,k
σ2
和k
p1
,k
p21
,k
p2
均为正定矩阵,δτ=τ
‑
τ
c
,δf=f
‑
f
c
。
[0192]
(5)基于步骤(1)的相对轨道与姿态运动学和步骤(4)中相对轨道与姿态中间误差变量设计相对轨道与姿态虚拟控制量;
[0193][0194][0195]
式中,k1,k
σ1
,k
σ21
与k3,k
p1
,k
p21
均为对称正定矩阵。与分别为
[0196][0197][0198]
(6)基于步骤(5)的相对轨道与姿态虚拟控制量,求解相对轨道与姿态虚拟控制量的导数估计值和
[0199][0200][0201]
式中,ζ1,ζ2与ω
n1
,ω
n2
分别为命令滤波器增益与阻尼比。
[0202]
(7)基于步骤(1)的相对轨道与姿态动力学、步骤(4)中相对轨道与姿态中间误差
变量、步骤(6)的相对轨道与姿态虚拟控制量的导数设计抗饱和预设性能交会对接控制器,并构建自适应律估计跟踪航天器质量、转动惯量矩阵分量与控制器设计所需的辅助变量。
[0203][0204]
式中,k2,k
σ2
,k
σ21
和k4,k4,k
p21
均为对称正定矩阵,辅助变量k
σ
与k
p
的自适应律分别为
[0205][0206][0207]
式中,b
σ
,b
σ1
,b
σ2
和b
p
,b
p1
,b
p2
均为正常数,与的自适应律分别为
[0208][0209]
式中,γ1和γ2均为正定矩阵,proj(
·
)为投影算子,k
σ
为正常数,表示为
[0210][0211]
可表示为
[0212][0213][0214]
式中,为线性算子,对于任意向量α=[a
1 a
2 a3]
t
,有
[0215][0216]
与的自适应律分别为
[0217][0218]
式中,γ3与k
p
均为正常数,γ4均为正定矩阵。
[0219]
给出本发明仿真实例,如图3至图5所示,给出了跟踪航天器与目标航天器间相对轨道跟踪误差随时间变化曲线,如图6至图8所示,给出了跟踪航天器与目标航天器间相对姿态跟踪误差随时间变化曲线。根据图3∽5和图6∽8可以看出,相对轨道与姿态跟踪误差均能在较短的时间内收敛到平衡点附近,而且整个暂态过程中,相对轨道与姿态跟踪误差均位于由相对轨道与姿态跟踪性能指标要求所确定的性能边界约束范围内。
[0220]
综上,本发明设计的交会对接最后逼近段相对轨道与姿态跟踪控制方法,通过设计一种新的预设性能函数,克服了传统预设性能控制方法依赖跟踪误差初值的缺点。在考虑了执行机构饱和约束的情况下,既保证了控制系统稳定的同时,又兼顾了相对轨道与姿态跟踪误差的暂态性能和稳态性能。
[0221]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

