1.本发明为提供一种追踪装置与方法,特别是一种使用蓝牙的追踪装置与方法。
背景技术:
2.随着手机等智能无线装置普及,通过无线感测、行动app及机电相关技术产生的应用种类也更广泛,追踪功能为其中的一种。
3.举例来说,用于追踪行李和其他类似物体的系统,可以通过无线装置像是手机的gps功能来发射标签存储和传输坐标来达成。还有像是用于动物或小孩、老人等追踪对象的功能,而在对象是人的情形下,除了追踪位置之外,通常还会附有侦测生理参数讯号,如体重、血压、心跳速率、体温等功能以掌握健康状况。
4.除此之外,当追踪对象发生多种状况时,静态数据无法达到完全的监控效果,因此需要发展对目标动作的侦测,除了可帮助掌握目标的位置动向,也可得知较详细的动态,以达到更好的量测、防走失、安全与保健和其他防护等多种效果。
技术实现要素:
5.为实现上述目的,本发明公开一种移动追踪装置,其特征在于:其包括一三轴加速器,其用于侦测所述移动追踪装置的一加速度值;一微控制器,其耦接于所述三轴加速器,用于执行以下步骤:a)计算所述加速度值;b)判断所述加速度值的一变化状态;以及c)根据所述加速度值的该变化状态,使用一线性回归演算法计算一移动资料;以及一通信模组,其耦接于所述微控制器以传输该移动资料。
6.作为进一步的改进,当所述微控制器判断该变化状态为一转换状态时,所述微控制器根据该转换状态对应的一变化参数计算所述移动资料,然后重新回到步骤a)。
7.作为进一步的改进,当所述微控制器判断该变化状态为一静止状态时,所述微控制器根据该静止状态对应的一基准参数重新回到步骤a)。
8.作为进一步的改进,步骤b)另包含根据该变化参数判断所述加速度值的该变化状态。
9.作为进一步的改进,步骤b)另包含根据该基准参数判断所述加速度值的该变化状态。
10.为实现上述目的,本发明公开一种移动追踪方法,其特征在于:其包括a)计算一目标装置的一加速度值;b)判断所述加速度值的一变化状态;以及c)根据该加速度值的该变化状态,使用一线性回归演算法计算一移动资料。
11.作为进一步的改进,当判断该变化状态为一转换状态时,根据该转换状态对应的一变化参数计算该移动资料,然后重新回到步骤 a)。
12.作为进一步的改进,当所述微控制器判断该变化状态为一静止状态时,所述微控制器根据该静止状态对应的一基准参数重新回到步骤a)。
13.作为进一步的改进,步骤b)另包含:根据该变化参数判断所述加速度值的该变化
状态。
14.作为进一步的改进,步骤b)另包含:根据该基准参数判断所述加速度值的该变化状态。
15.如上所述,通过使用本发明的移动追踪装置与方法,通过与智能装置像是手机的连动,除了可帮助掌握目标的位置动向,也可得知较详细的动态,以达到更好的量测、防走失、安全与保健和其他防护等多种效果。
附图说明
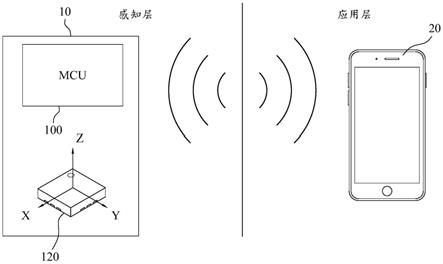
16.图1为依据本发明一实施例的移动追踪系统方块图。
17.图2a为依据本发明一实施例的移动追踪方法的部分流程图。
18.图2b为依据本发明一实施例的移动追踪方法的部分流程图。
具体实施方式
19.请参照图1,图1为依据本发明一实施例的移动追踪系统方块图。如图1所示,本发明提出的移动追踪装置10包括:一三轴加速器120、一微控制器100与一通信模组(无图示)。该三轴加速器 120侦测该移动追踪装置10的一加速度值。该微控制器100耦接于该三轴加速器120并执行以下步骤:a)计算该加速度值;b)判断该加速度值的一变化状态;以及c)根据该加速度值的该变化状态,使用一线性回归演算法计算一移动资料。该通信模组耦接于该微控制器100以传输该移动资料。在此实施例中,移动追踪装置10是位于网路感知层,与位于网路应用层的行动装置20,例如手机,进行蓝牙无线通信以将该移动资料传给手机,让手机上对应移动追踪装置10的应用程式储存并显示该移动资料给使用者。
20.在此实施例中,当该微控制器100判断该变化状态为一转换状态时,该微控制器100根据该转换状态对应的一变化参数计算该移动资料,然后重新回到步骤a),同时,步骤b)另包含:根据该变化参数判断该加速度值的该变化状态。
21.在此实施例中,当该微控制器100判断该变化状态为一静止状态时,该微控制器100根据该静止状态对应的一基准参数重新回到步骤a),同时,步骤b)另包含:根据该基准参数判断该加速度值的该变化状态。
22.请参照图2a、2b,其分别为依据本发明一实施例的移动追踪方法的部分流程图,如图2a所示,该微控制器100主要进行的步骤 s200:对该三轴加速器120进行初始设定,接着在步骤s202计算该加速度值,也就是上述步骤a),然后在步骤s204进入休眠,并再从步骤s202计算该加速度值开始循环。
23.在图2b中显示的是进行侦测的部分流程图,在此实施例所使用的线性回归演算法算式为:
[0024][0025][0026]
[0027]
其中,i=1,2,
…
,n,n代表实施例中的n个加速度值y_i(单位为mg,g为重力加速度),对应于时间x_i(单位为ms)容置通道121 的上下两端是使用胶水填充15密封,如此具有一定的密封性及防水性。
[0028]
在步骤s210会先取得该加速度值,然后在步骤s212计算加速度值对时间轴的改变趋势,也就是斜率m,以进行上述步骤b)中的判断该加速度值的一变化状态,即在步骤s214中判断条件式i≠ 0|m≠0是否符合,若是则至步骤s218,递增i值,继续处理下一点;若否,也就是判断为静止状态,则至步骤s216计算基准参数,也就是如上述,该微控制器100根据该静止状态对应的一基准参数重新回到步骤a),再来的步骤s212则如上所述的步骤b)另包含:根据该基准参数判断该加速度值的该变化状态。在步骤s220~s226 中,对应的是如上所述的当该微控制器100判断该变化状态为一转换状态时,该微控制器100根据该转换状态对应的一变化参数计算该移动资料,然后重新回到步骤a)。步骤s220是进行等式3来计算线性回归参数,步骤s222是取得变化参数β_i,β_(i 1),
…
,β _n,步骤s224是判断条件式是否符合,若是则至步骤s226,回到i=0在重复至s210,若否则直接重复至s210,再来的步骤s212 则如上所述的步骤b)另包含:根据该变化参数判断该加速度值的该变化状态本实施例中,本发明充电插座100应用于一种无线耳机200 上,故具有两个镜像设置的充电插座100以供无线耳机200的左右耳进行充电,每一充电插座100皆可独立运作。绝缘本体1还具有一向外凸伸形成的定位块14,当本发明在后段制程中,装设于一充电盒中时,该定位块14可以辅助本发明充电插座100定位且防止本发明充电插座100在充电盒中旋转,同时也起到区分左右充电插座100的防呆作用。
[0029]
下表1是本实施例在n为25时,对应上述静止状态与转换状态的加速度值列表,表1显示出侦测到三轴加速器静止状态的情形,表2与表3显示出侦测到三轴加速器转换状态的情形,分别是向右与向左动作。
[0030]
表1
[0031]
[0032][0033]
表2
[0034]
[0035][0036]
表3
[0037]
[0038][0039]
通过使用本发明的移动追踪装置与方法,借由移动追踪装置中的通信模组的通信协定,在此为蓝牙协定,与手机配对连线后,传输该移动资料至手机中的应用程式,让使用者通过应用程式掌握目标的位置动向,也可得知较详细的动态,以达到更好的量测、防走失、安全与保健和其他防护等多种效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

