1.本发明涉及虫害防治技术领域,特别涉及一种基于物联网的检测与灭蟑机器人。
背景技术:
2.蟑螂喜欢选择温暖、潮湿、食物丰富和多缝隙的场所栖居,凡是有人生活和居住的建筑物内,一般都具有这些条件,所以蟑螂就成了侵害千家万户的卫生害虫,不管在饭店、家庭,还是在火车、轮船上,厨房总是侵害最严重的场所,它们一般喜欢栖居在靠近炉灶、水池的地方。
3.蟑螂不仅喜欢咬食和破坏纤维织品、纸张、文物藏品、食品和药材,它本身还能携带致病菌,如伤寒杆菌、沙门杆菌、痢疾杆菌、变形杆菌和绿脓杆菌等病原体,是能传播多种人类疾病媒介,它是一种传播疾病,危害人们健康的害虫。此外,蟑螂可以从体内排出怪味分泌物污染食物,其分泌物粪便中还含有多种致癌物质,成为多种疾病的产生和传播根源。蟑螂也会带有过敏原,使有过敏体质的人出现皮疹、哮喘和打喷嚏等症状。
4.蟑螂的食性杂,到处取食,因此侵害面广,在垃圾堆、厕所、厨房、餐厅、橱柜中都会发现蟑螂。蟑螂生命力极强,繁殖速度快,一旦进入室内,很难彻底根除。蟑螂的防治是卫生害虫防治的重要目标。
5.现有技术中,蟑螂捕杀方式大多采用投药和物理拍打方式对蟑螂进行灭杀,但是药物灭杀可能造成人或者动物误食,从而给人和动物带来严重的伤害,传统的物理拍打方式不仅容易造成蟑螂尸体飞溅,造成病毒传染,而且因为蟑螂的顽强生命,即使头和身体分开也可以活好几天,传统物理拍打方式不易对蟑螂造成致命伤害。
技术实现要素:
6.针对现有技术存在的蟑螂捕杀方式存在安全隐患的问题,本发明的目的在于提供一种基于物联网的检测与灭蟑机器人。
7.为实现上述目的,本发明的技术方案为:
8.一种基于物联网的检测与灭蟑机器人,包括
9.箱体;
10.饵料盘,所述饵料盘用于装载毒性饵料,所述饵料盘可活动地连接在所述箱体内,所述箱体上设置有饵料盘出入口以使所述饵料盘通过;以及
11.驱动装置,所述驱动装置固定安装在所述箱体内,所述驱动装置的输出端与所述饵料盘连接以驱动所述饵料盘;
12.处理器和生物探测仪,所述处理器安装在所述箱体内,所述生物探测仪安装在所述箱体上以检测人或者动物,且所述处理器与所述驱动装置以及所述生物探测仪电性连接;
13.通信模块,所述通信模块安装在所述箱体上,且所述通信模块与所述处理器电性连接;以及
14.检测电路,所述检测电路设置在所述饵料盘出入口,所述检测电路与所述处理器电性连接。
15.优选的,所述饵料盘通过转轴可转动连接在所述箱体内,所述驱动装置为电机,所述电机的输出轴与所述转轴驱动连接。
16.优选的,所述饵料盘有两个,两个所述饵料盘对称地设置在所述饵料盘出入口的两侧,两个所述饵料盘均配置有所述驱动装置。
17.优选的,所述箱体包括可拆卸连接的底板、顶板、前侧板、后侧板、左侧板和右侧板,所述饵料盘连接在所述底板上,所述饵料盘出入口设置在所述前侧板上,所述驱动装置固定安装在所述左侧板或者所述右侧板上。
18.优选的,所述左侧板和/或所述右侧板的前部设置有缺口以避让所述饵料盘。
19.优选的,所述检测电路包括电源、电压或者电流检测装置以及至少两个导电胶带;所述至少两个导电胶带互相平行且间隔布置,所述导电胶带连接在所述电源的正极或者负极上,且连接在所述电源的正极上的导电胶带与连接在所述电源的负极上的导电胶带相互交错布置;所述电压或者电流检测装置连接在所述电源的正极或者负极以检测所述检测电路导通时产生的电压或者电流信号。
20.进一步的,还包括加热装置,所述加热装置安装在所述饵料盘上,且所述加热装置与所述处理器电性连接。
21.进一步的,还包括温度传感器和湿度传感器,所述湿度传感器和所述温度传感器均设置在所述饵料盘上以分别检测饵料的湿度和温度,所述湿度传感器和所述温度传感器与所述处理器电性连接。
22.进一步的,还包括光敏元件,所述光敏元件安装在所述箱体上以检测所述箱体外部的光照强度,且所述光敏元件与所述处理器电性连接。
23.进一步的,还包括防倾倒检测装置,所述防倾倒检测装置安装在所述箱体内,且所述防倾倒检测装置与所述处理器电性连接。
24.采用上述技术方案,由于箱体、相对箱体可活动的饵料盘、用于驱动饵料盘的驱动装置以及箱体上用于饵料盘通过的饵料盘出入口的设置,使得承载有毒性饵料的饵料盘在使用时才会伸出到箱体外,以用于灭杀蟑螂,而在不使用时即可收入到箱体内,以避免被人或者动物误食,做到灭杀蟑螂的同时对人和动物进行保护;由于生物探测仪的设置,使得人或者动物靠近时,处理器即可接收到探测信号,并控制驱动装置带动饵料盘收回到箱体内;又由于检测电路和通信模块的设置,不但能够将生物探测仪探测到的人或者动物靠近的信号通过通信模块发送给远程终端,还能够将检测电路所检测到的蟑螂进入箱体的数量信号及时通过通信模块发送给远程终端。
附图说明
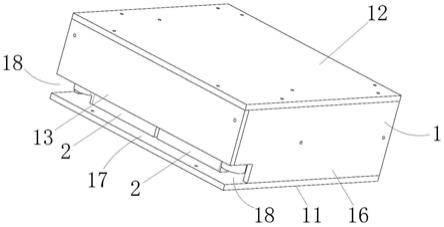
25.图1为本发明实施例一的结构示意图;
26.图2为本发明实施例一中去除前侧板后的主视图;
27.图3为本发明实施例一中左侧板或者右侧板的结构示意图;
28.图4为本发明实施例一中饵料盘的结构示意图;
29.图5为本发明实施例一的主视图;
30.图6为本发明实施例一的电气连接框图;
31.图7为本发明实施例一中检测电路的安装布置示意图;
32.图8为本发明实施例二中加热装置、湿度传感器和温度传感器在饵料盘上的安装示意图;
33.图9为本发明中设置有隔板的箱体的结构示意图。
34.图中:1
‑
箱体、11
‑
底板、12
‑
顶板、13
‑
前侧板、14
‑
后侧板、15
‑
左侧板、16
‑
右侧板、17
‑
饵料盘出入口、18
‑
缺口、19
‑
隔板、2
‑
饵料盘、21
‑
主体、22
‑
延伸体、23
‑
轴孔、24
‑
转轴、3
‑
驱动装置、31
‑
电机支架、4
‑
处理器、5
‑
生物探测仪、51
‑
透明保护罩、6
‑
通信模块、7
‑
检测电路、71
‑
电压或者电流检测装置、72
‑
导电胶带、8
‑
加热装置、9
‑
湿度传感器、10
‑
温度传感器。
具体实施方式
35.下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
36.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示对本发明结构的说明,仅是为了便于描述本发明的简便,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.对于本技术方案中的“第一”和“第二”,仅为对相同或相似结构,或者起相似功能的对应结构的称谓区分,不是对这些结构重要性的排列,也没有排序、或比较大小、或其他含义。
38.另外,除非另有明确的规定和限定,术语“安装”、“连接”应做广义理解,例如,连接可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个结构内部的连通。对于本领域的普通技术人员而言,可以根据本发明的总体思路,联系本方案上下文具体情况理解上述术语在本发明中的具体含义。
39.实施例一
40.作为本发明的一个基础实施例,其提供一种基于物联网的检测与灭蟑机器人,如图1及图2所示,包括箱体1、饵料盘2和驱动装置3。
41.其中,箱体1整体上呈矩形壳体构造,其包括有底板11、顶板12、前侧板13、后侧板14、左侧板15和右侧板16。前侧板13、后侧板14、左侧板15和右侧板16分别通过螺钉固定在底板11的表面,而顶板12则通过螺钉固定在前侧板13、后侧板14、左侧板15和右侧板16的顶面。例如,如图3所示,在左侧板15(右侧板16)的上部、下部、前部和后部分别设置有耳,耳上设置有螺纹孔,以便于顶板12、底板11、前侧板13和后侧板14通过螺钉对应的连接到左侧板15(右侧板16)上。
42.饵料盘2可活动地连接在箱体1内,箱体1上设置有饵料盘出入口17,以使饵料盘2能够从中通过。本实施例中,饵料盘出入口17设置在前侧板13的下部位置。饵料盘2则用于装载毒性饵料,如图4所示,饵料盘2包括圆盘形的主体21,该主体21的顶面具有内凹区域以便于装载毒性饵料,该主体21的侧壁向外延伸并形成延伸体22,延伸体22具有一个平面侧
壁以便于在饵料盘2收入到箱体1内部时将饵料盘出入口17尽量封闭;同时,延伸体22上设置有轴孔23,轴孔23内固定连接有转轴24,该转轴24则通过轴承转动连接在底板11的表面,从而使饵料盘2可转动地连接在箱体1上,并通过转动通过饵料盘出入口17。或者在一个实施例中,还可以在底板11上设置滑轨,而在饵料盘2上设置与该滑轨相适配的滑槽或者滑块,从而使饵料盘2以滑动的方式通过饵料盘出入口17。
43.具体在本实施例中,箱体1的各个部件以及饵料盘2均为3d打印制造,其材料为pla,其颜色配置为深色。
44.驱动装置3则固定安装在箱体1内,驱动装置3的输出端与饵料盘2连接以驱动饵料盘2从饵料盘出入口17中进出箱体1。本实施例中,设置驱动装置3为电机,其通过电机支架31固定,电机支架31则通过螺钉或者一体成型的方式固定在箱体1的左侧壁15或者是右侧壁16上,电机的输出轴则通过联轴器或者齿轮传动的方式与上述的转轴连接。同时箱体1上还安装有用于操作电机的电机控制电路,以进行电机的启动、停止、正转和反转等操作。
45.可以理解的是,为了提高灭蟑效果,同时降低电机的负荷,设置上述的饵料盘2有两个,两个饵料盘2对称地设置在饵料盘出入口17的两侧,并且两个饵料盘2各配置有一个驱动装置3,两个驱动装置3则分别安装在左侧壁15和右侧壁16上。
46.同时,在左侧板13和/或右侧板14的前部设置有缺口18以避让饵料盘2,以便于饵料盘2能够具有更大的打开角度。例如,当饵料盘2配置为一个时,只需在左侧板13和右侧板14其中的一个上设置缺口18即可,而当饵料盘2对称地配置为两个时,则分别在左侧板13和右侧板14上设置缺口18。
47.使用时,毒性饵料事先放置在饵料盘2内,当需要进行灭蟑时,操作驱动装置3(电机),电机带动转轴转动,从而使固定在转轴上的饵料盘2以转动的方式从饵料盘出入口17中旋出,即可进行灭蟑;而当不需要进行灭蟑,或者是需要防止人或者动物误食毒性饵料时,则操作驱动装置3(电机),由电机带动转轴转动,从而使固定在转轴上饵料盘2以转动的方式通过饵料盘出入口7,被收纳到箱体1内,从而做到对人和动物的保护。
48.本实施例中,还为基于物联网的检测与灭蟑机器人配置有处理器4和生物探测仪5。其中,处理器4安装在箱体1内,以进行防尘和防水等保护。而生物探测仪5安装在箱体1上以检测人或者动物,而该处理器与上述的驱动装置3以及生物探测仪5电性连接,如图6所示。可以理解的是,直接将生物探测仪5安装在箱体1的外侧壁(顶板12)上,并在其外部套设透明保护罩51,如图5所示;或者当生物探测仪5安装在箱体1内时,在箱体1的侧壁上设置有供生物探测仪5的探头观察箱体1外部环境的透明窗口。
49.处理器4配置为一plc芯片,其固定安装在电路板上,该电路板设置有电源接口以进行供电,而用于控制电机的电机控制电路通过该电路板与plc连接,以便于接收plc的控制信号;生物探测仪5以及通信模块6分别通过相应的接口连接到电路板上,从而与plc进行连接以便于进行数据通信。
50.生物探测仪5优选为红外线生物探测仪,其通过探测人和动物发出的红外线来进行人和动物的识别。
51.可以理解的是,在使用时,可以事先向plc芯片加载控制程序,例如,设定灭蟑工作时间,由plc芯片向电机控制电路发送指令,使电机转动并带动饵料盘2旋出到箱体1外进行灭蟑作业,当生物探测仪5检测到有人或者动物靠近时,plc芯片则再次通过电机控制电路
发送指令,使电机反向转动并带动饵料盘2旋入到箱体1内,从而防止人和动物误食饵料盘2中的毒性饵料。
52.本实施例中,还为基于物联网的检测与灭蟑机器人配置有通信模块6,通信模块6安装在箱体1上,具体是箱体1的表面或者内部均可,例如将其安装在箱体1的内部以进行防尘和防水。通信模块6配置为wi fi模块,并在使用时连接到wi fi网络上,从而通过互联网接收远程终端(智能手机、平板电脑、笔记本电脑或者台式电脑等设备)发送的控制指令或者向远程终端发送信息;当然,通信模块6也可以配置为3g、4g或者5g模块。
53.使用时,操作者在远程终端上发送控制信息,通信模块6接收到该控制信息后转发给处理器4,处理器4根据控制信息进行相应的操作,例如使饵料盘2伸出或者收回。同时,当生物探测仪5探测到人或者动物靠近时,通信模块6也同步地将该信息发送给远程终端,以便于远程的操作者知晓,并对基于物联网的检测与灭蟑机器人发生远程控制指令或者是通过其他方式对该信息进行确认等等。使用物联网技术对本基于物联网的检测与灭蟑机器人进行集中管理与控制,远程终端通过其搭载的app即可控制饵料盘2的运动,方便管理人员换药。
54.本实施例中,还为基于物联网的检测与灭蟑机器人配置有检测电路7,该检测电路7设置在饵料盘出入口17处,以便于检测蟑螂进出箱体1的情况,同时,检测电路7通过电路板与处理器4电性连接。
55.本实施例中,检测电路7包括电源、电压或者电流检测装置71以及至少两个导电胶带72。至少两个导电胶带72互相平行且间隔布置,导电胶带72连接在电源的正极或者负极上,并且连接在电源的正极上的导电胶带与连接在电源的负极上的导电胶带相互交错布置。而电压或者电流检测装置71则连接在电源的正极或者负极,以在检测电路被导通时产生的电压或者电流信号能够被其所检测到。
56.其中,检测电路7的电能取自电路板,因此不必单独为检测电路7配置独立的电源,只需要设置一个正极导电干线和一个负极导电干线即可,正极导电干线用于连接电路板上的电源正极,负极导电干线用于连接电路板上的电源负极。而导电胶带72均布置在底板11的表面,并且布置在导电胶带72平行于饵料盘出入口17(前侧板13),同时导电胶带72的长度配置为有底板11的左右方向宽度相同,相邻的两个导电胶带72之间的间距配置为5
‑
10mm,各个导电胶带72对应的连接在正极导电干线或者负极导电干线上即可。而电压或者电流检测装置71设置在靠近正极导电干线和负极导电干线与电路板连接的接口处,即可使得任意两个导电胶带72被导电体连接起来后,电压或者电流检测装置71通过检测电路7上产生的电压或者电流信号而及时知晓。如图7所示,配置电压或者电流检测装置71为电流表时,检测电路7在底板11上的安装布置示意图。
57.可以理解的是,在饵料盘2被收入到箱体1中时,其会散发相应的气味信号以吸引蟑螂,而当蟑螂从饵料盘出入口17中爬入箱体1内时,其需要经过导电胶带72,当蟑螂同时与两个相邻的导电胶带72接触时,检测电路7的被导通,电压或者电流检测装置71获得一个电压或者电流信号,即可被处理器4获知,处理器4一方面可以根据其内部的程序进行记录,另一方面还可以通过通信模块6将记录的数据发送给远程终端,以便于远程终端进行数据的处理,例如作为测试毒性饵料对蟑螂吸引力和杀伤力的试验数据使用,还可以查看一个或者多个基于物联网的检测与灭蟑机器人的检测数据,以及药物是否到期等信息。
58.实施例二
59.其在实施例一的基础上,为基于物联网的检测与灭蟑机器人配置有加热装置8,加热装置8安装在饵料盘2上,例如饵料盘2的底面或者是内部的安装腔里,加热装置8用于对饵料盘2进行加热,通过提供适于蟑螂获得的温度环境来吸引蟑螂,从而使得毒性饵料能够被蟑螂及时发现和食用,提高灭杀效果。可以理解的是,加热装置8可以配置为恒温加热装置,例如热床,其本身即具有保持恒温的功能。
60.或者,在一个实施例中,当加热装置8不具有保持恒温功能时,还为其配置温度传感器9和湿度传感器10,温度传感器9和湿度传感器10均安装在饵料盘2的用于装载毒性饵料的内凹区域中,以检测饵料盘2内的毒性饵料的温度和湿度,如图8所示,并且,该湿度传感器9和温度传感器10均与处理器4电性连接。从而在毒性饵料所处的温度以及湿度超出适当的范围时,由处理器4对加热装置8进行工作状态的控制。例如设置加热装置8为内嵌在饵料盘2内的电热丝或者热电偶,其工作时发热,使饵料盘2以及其内装载的毒性饵料温度升高,以吸引蟑螂,而当温度超过设定的范围,例如25
‑
30℃时,则处理器4控制其断电即可。
61.实施例三
62.其在实施例一或者二的基础上,为基于物联网的检测与灭蟑机器人配置有光敏元件,光敏元件安装在箱体1上以检测箱体1外部的光照强度,且光敏元件与处理器4电性连接。可以理解的是,当光敏元件安装在箱体1内时,在箱体1的侧壁上设置有供光敏元件的感光部分接收箱体1外部光线照射的透明窗口,或者直接将光敏元件安装在箱体1的外侧壁上,并在其外部套设透明保护罩,例如可将光敏元件安装在实施例二中的透明保护罩51中。
63.如此设置,使得当白天时,光敏元件检测到光线充足,向处理器4发送相应的信号,从而使饵料盘2在处理器4的控制下处于箱体1内部,不进行灭蟑操作,因为白天蟑螂活动少,灭蟑效率低,同时人和动物活动较多,从而可以避免误食;而当夜晚时,蟑螂活动多,光敏元件检测到光线不足,向处理器4发送相应的信号或者不发送信号,从而使饵料盘2在处理器4的控制下伸出到箱体1的外部,以进行灭蟑操作。
64.实施例四
65.其在实施例一、二或者三的基础上,为基于物联网的检测与灭蟑机器人配置有防倾倒检测装置(图中未示出),该防倾倒检测装置安装在箱体1内,且防倾倒检测装置与处理器4电性连接。如此设置,使得当箱体1处于翻到状态时,处理器4通过防倾倒检测装置发送的信号即可知晓,一方面可以通过通信模块6向远程终端发送预警信号,另一方面还可以避免饵料盘2在此状态下被打开,从而造成设备损伤。
66.可以理解的是,上述实施例均配置有一定数量的的电气元件,因此可在箱体1内设置隔板19,如图9所示,隔板19沿左右方向设置在箱体1内以将箱体1分割为相互独立的机械仓和电气仓,其中隔板19上设置有连接耳,底板11和顶板12分别通过螺钉固定在连接耳上。而上述的驱动装置3和饵料盘2等机械运动部件均布置在机械仓内,而处理器4、通信装置6等优选设置在箱体1内部的电气元件则布置在电气仓内。
67.以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

