一种基于5g和北斗的电力巡检机器人
技术领域
1.本实用新型属于电力巡检技术领域,更具体地,涉及一种基于5g和北斗的电力巡检机器人。
背景技术:
2.伴随经济发展和人民生活水平的提高,社会用电量不断提升,对电网运行稳定性提出更高挑战,变电、输电、配电等电力系统各环节的巡检需求进一步提高。目前电力公司仍主要采用传统的人工巡检方式,即利用看、听、闻等感知手段,对电力设备运行状态进行查验和记录,此种方式存在着人力成本高、巡检手段单一、巡检数据主观性强、受天气影响大、数据管理分散等问题,逐渐无法满足准确、实时、高频率的电力设备巡检需求。
3.我国目前正从劳动密集型向现代化制造业方向发展,振兴制造业、实现工业化是我国经济发展的重要任务。从工业发展历程看,生产手段必然要经历机械化、自动化、智能化、信息化的变革。随着国民经济的快速发展以及生产技术的不断进步和劳动力成本的不断上升,使用机械、自动化技术代替人力成为巡检管理的必然趋势。
技术实现要素:
4.本实用新型的目的是针对现有技术中存在的不足,提供一种基于5g和北斗的电力巡检机器人,该机器人通过按照预设路线自动巡检,替代人工外出,降低人工成本,并通过延展结构增加检测范围,加强适用性,使检测能力提升。
5.为了实现上述目的,本实用新型提供一种基于5g和北斗的电力巡检机器人,包括:
6.机箱,内部设置有控制系统;
7.驱动结构,设置在所述机箱的下端,与所述控制系统电性连接;
8.检测结构,设置在所述机箱的上端,与所述控制系统电性连接;
9.延展结构,设置在所述机箱的上端,与所述控制系统电性连接。
10.可选地,所述控制系统包括:
11.处理模块,用于根据预设程序或控制指令控制所述机器人运动;
12.5g通讯模块,设置在所述机箱内部,与所述处理模块电性连接,用于远程通讯连接,接收所述控制指令和反馈现场信息;
13.北斗定位模块,设置在所述机箱内部,与所述处理模块电性连接,用于定位所述机器人位置。
14.可选地,所述驱动结构包括:
15.六轮减震底盘,设置在所述机箱的下端;
16.实心越野胎,设置在所述六轮减震底盘的轮毂上;
17.电子眼,设置在所述机箱的外周上,与所述控制系统电性连接。
18.可选地,所述检测结构包括:
19.伸缩杆,设置在所述机箱上;
20.云台,设置所述伸缩杆的一端;
21.摄像机,设置在所述云台上。
22.可选地,所述摄像机包括:
23.调焦模块,用于自动对焦;
24.照明模块,用于补充光线强度;
25.夜视模块,用于夜间观测;
26.热成像模块,用于热成像检测。
27.可选地,所述延展结构包括:
28.起降平台,设置在所述机箱上;
29.无人机,设置在所述起降平台上;
30.通讯模块,设置在所述起降平台上,用于中转和加强所述控制指令和所述现场信息。
31.可选地,还包括采集结构,所述采集结构包括温度传感器和湿度传感器。
32.可选地,所述无人机也与所述控制系统电性连接。
33.可选地,所述机箱的外周设置有荧光板。
34.可选地,还包括扬声器,设置在所述机箱上,与所述控制系统电性连接。
35.本实用新型提供一种基于5g和北斗的电力巡检机器人,其有益效果在于:
36.1、该机器人通过按照预设路线自动巡检,替代人工外出,降低人工成本,并通过延展结构增加检测范围,加强适用性,使检测能力提升;
37.2、该机器人通过5g通讯模块和北斗定位系统实时通讯定位,增加远程操作稳定性;
38.3、该机器人检测手段多样,检测方面完善,检测多方面比对,结果安全可靠。
39.本实用新型的其它特征和优点将在随后具体实施方式部分予以详细说明。
附图说明
40.通过结合附图对本实用新型示例性实施方式进行更详细的描述,本实用新型的上述以及其它目的、特征和优势将变得更加明显,其中,在本实用新型示例性实施方式中,相同的参考标号通常代表相同部件。
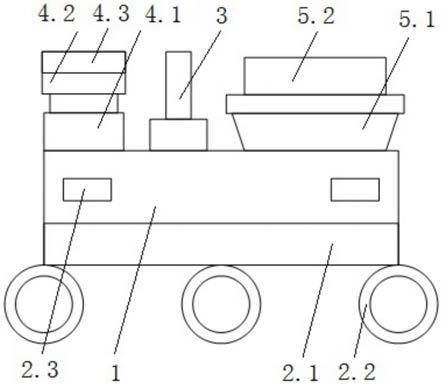
41.图1示出了根据本实用新型的一个实施例的一种基于5g和北斗的电力巡检机器人的主视的结构示意图。
42.图2示出了根据本实用新型的一个实施例的一种基于5g和北斗的电力巡检机器人的左视的结构示意图。
43.附图标记说明:
44.1、机箱;2、驱动结构;2.1、六轮减震底盘;2.2、实心越野胎;2.3电子眼;3、采集结构;4、检测结构;4.1、伸缩杆;4.2、云台;4.3、摄像机;5、延展结构;5.1、起降平台;5.2无人机。
具体实施方式
45.下面将更详细地描述本实用新型的优选实施方式。虽然以下描述了本实用新型的
优选实施方式,然而应该理解,可以以各种形式实现本实用新型而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本实用新型更加透彻和完整,并且能够将本实用新型的范围完整地传达给本领域的技术人员。
46.图1示出了根据本实用新型的一个实施例的一种基于5g和北斗的电力巡检机器人的主视的结构示意图;图2示出了根据本实用新型的一个实施例的一种基于5g和北斗的电力巡检机器人的左视的结构示意图
47.如图1
‑
2所示,一种基于5g和北斗的电力巡检机器人,包括:
48.机箱1,内部设置有控制系统;
49.驱动结构2,设置在机箱1的下端,与控制系统电性连接;
50.检测结构4,设置在机箱1的上端,与控制系统电性连接;
51.延展结构5,设置在机箱1的上端,与控制系统电性连接。
52.具体的,通过机箱1放置控制系统,通过控制系统实时监控驱动结构2驱动机器人移动并将信息回传,通过检测结构4检测现场情况,通过延展结构5增加机器人检测范围,提升检测效果。
53.在本实施例中,控制系统包括:
54.处理模块,用于根据预设程序或控制指令控制机器人运动;
55.5g通讯模块,设置在机箱1内部,与处理模块电性连接,用于远程通讯连接,接收控制指令和反馈现场信息;
56.北斗定位模块,设置在机箱1内部,与处理模块电性连接,用于定位机器人位置。
57.具体的,通过处理模块处理分析采集的信息,自动分析处理现场情况,降低人工作业量,通过5g通讯模块进行远程通讯,保证通讯连接稳定,通过北斗定位模块进行卫星定位,确认机器人位置。
58.在本实施例中,驱动结构2包括:
59.六轮减震底盘2.1,设置在机箱1的下端;
60.实心越野胎2.2,设置在六轮减震底盘2.1的轮毂上;
61.电子眼2.3,设置在机箱1的外周上,与控制系统电性连接。
62.具体的,通过六轮减震底盘2.1方便机器人移动,增强机器人越野能力,适应恶劣天气和崎岖道路,通过实心越野胎2.2增加越野能力,避免轮胎漏气影响移动,通过电子眼2.3检查附近路面,将附件路面信息上传控制系统,使机器人可自动分析路面状况并进行行进,减少行进磕碰。
63.在本实施例中,检测结构4包括:
64.伸缩杆4.1,设置在机箱1上;
65.云台4.2,设置伸缩杆4.1的一端;
66.摄像机4.3,设置在云台4.2上。
67.具体的,通过伸缩杆4.1升降云台4.2和摄像机4.3,通过云台4.2快速调整摄像机4.3,通过摄像机4.3采集现场信息。
68.在本实施例中,摄像机4.3包括:
69.调焦模块,用于自动对焦;
70.照明模块,用于补充光线强度;
71.夜视模块,用于夜间观测;
72.热成像模块,用于热成像检测。
73.在本实施例中,延展结构5包括:
74.起降平台5.1,设置在机箱1上;
75.无人机5.2,设置在起降平台5.1上;
76.通讯模块,设置在起降平台5.1上,用于中转和加强控制指令和现场信息。
77.具体的,通过起降平台5.1搭载无人机5.2,通过无人机5.2检测机器人不方便查看的位置地点,例如屋顶、电线杆顶等较高地点。
78.在本实施例中,还包括采集结构3,采集结构3包括温度传感器和湿度传感器。
79.具体的,通过采集结构3采集现场环境参数,通过控制系统比对阈值判断是否存在安全隐患。
80.在本实施例中,无人机5.2也与控制系统电性连接。
81.在本实施例中,机箱1的外周设置有荧光板。
82.具体的,通过荧光板增加机器人夜间辨识度,防止夜晚因光线不足发生碰撞。
83.在本实施例中,还包括扬声器,设置在机箱1上,与控制系统电性连接。
84.具体的,通过扬声器播放预设音频,驱赶野生动物。
85.本实施例机器人使用时,以有日常巡检为例,机器人根据预设程序启动进行巡检,控制系统控制驱动结构2移动,按照设定路线行进,行进过程中通过检测结构4检测沿途的电力线路是否正常,同时采集结构3采集环境参数,通过控制系统比对阈值判断是否存在安全隐患,遇到无法通过或难以查看地点时,通过延展结构5查看,启动无人机5.2,从空中进行多角度俯拍查看,防止遗漏,同时通过5g通讯模块将巡检数据实时上传,并实时接收控制指令,可依照指令重点排查。
86.以上已经描述了本实用新型的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

