1.本发明涉及污水处理过程控制的研究领域,特别涉及一种基于深度学习的污水处理过程溶解氧控制方法及系统。
背景技术:
2.曝气过程,即向好氧池中通入空气或适当浓度的氧气,是污水处理中的重要过程,其能够促进好氧菌降解、转化污水中的有毒有害污染物质。好氧池中溶解氧浓度过高或过低都会影响污水处理效率。当溶解氧浓度过高时,会增加污水处理泵送能耗并且对微生物絮凝过程起到破坏作用;当溶解氧的浓度过低时,会导致污泥膨胀,甚至是生物处理效率大幅下降或完全失效,因此,精准且平稳地控制污水处理过程中的溶解氧浓度对污水处理效率至关重要。
3.pid控制作为经典工业控制方法,广泛适用于稳定的工业生产生活过程控制。而污水处理系统属于复杂的非线性系统,过程复杂多变,特别是水质波动较大时,控制器参数无法进行自适应调整优化,对污水处理过程中关键参数(如溶解氧)调控滞后、精确度低。因此,需要一种将深度学习模型与pid控制器结合起来的方法,利用深度学习来对pid控制器参数进行动态调整优化,实现对污水处理过程中溶解氧的快速、精准控制。
技术实现要素:
4.本发明的主要目的在于克服现有技术的缺点与不足,提供一种基于深度学习的污水处理过程溶解氧控制方法及系统,基于活性污泥处理过程中的仿真基准1号(bsm1)模型中的pid控制器,充分利用卷积神经网络(cnn)的空间特征提取能力与注意力机制(attention)中的重要成分获取能力,利用attention
‑
cnn模型来动态调整pid控制器的三个参数,创建基于attention
‑
cnn
‑
pid的溶解氧复合控制器,对污水处理过程中的溶解氧浓度进行精准且平稳的控制,提高污水处理效率。
5.本发明的第一目的在于提供一种基于深度学习的污水处理过程溶解氧控制方法。
6.本发明的第二目的在于提供一种基于深度学习的污水处理过程溶解氧控制系统。
7.本发明的第一目的通过以下的技术方案实现:
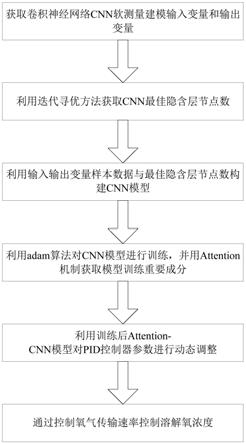
8.一种基于深度学习的污水处理过程溶解氧控制方法,其特征在于,包括以下步骤:
9.通过pid控制器获取历史数据,从历史数据中确定卷积神经网络cnn软测量模型的输入变量和输出变量,其中所述输入变量包括输入变量为溶解氧实际值与期望值的误差e及误差变化率ec,输出变量为pid控制器的三个参数:p、 i、d;
10.利用迭代寻优方法获取cnn软测量模型的最佳隐含层节点数;
11.根据获取的输入变量和输出变量样本与最佳隐含层节点数构建卷积神经网络cnn软测量模型;
12.通过adam学习率算法对cnn软测量模型进行训练,并用attention机制获取cnn软测量模型训练的重要成分,进而得到attention
‑
cnn模型,对 attention
‑
cnn模型进行训
练,得到训练后的attention
‑
cnn模型;
13.通过训练后的attention
‑
cnn模型对pid控制器的p、i、d三个参数进行动态调整,并获得溶解氧控制结果。
14.进一步地,所述利用迭代寻优方法获取卷积神经网络的最佳隐含层节点数,具体为:
15.第一步、设置cnn隐含层节点数的范围为8~1024,步长设置为32;
16.第二步、将cnn网络的初始训练误差用max_mse表示,设置max_mse=2000,把当前所选取的隐含层节点数为m(i)时对应的每个输出变量的均方误差之和记作mse(i),其中i表示所选取的隐含层节点的顺序;
17.第三步、将”rand(
‘
state’,0)”命令输入到命令行,以保证每次迭代寻优时网络的初始化状态相同;
18.第四步、当mse(i)<max_mse时,则将max_mse的值赋值给当前的mse(i),并将此时选取的隐含层节点数m(i)记为de_m(i);
19.第五步、当所有候选的隐含层节点数目全部轮完一遍时,此时的max_mse 即为训练的最小误差,对应的de_m(i)即为最佳隐含层节点数。
20.进一步地,所述根据获取的输入变量和输出变量样本与最佳隐含层节点数构建卷积神经网络cnn软测量模型,具体如下:
21.第一步、采集pid控制器的500组离线数据,并将其输入attention
‑
cnn模型,其中模型的输入变量为溶解氧实际值与期望值的误差e及误差变化率ec,输出变量为p、i、d三个参数;
22.第二步、根据深度神经网络训练集与测试集为8:2的比例,将前400组数据作为attention
‑
cnn模型的训练集,后100组数据作为测试集;
23.第三步、将e和ec按照1*2*1的方式输入attention
‑
cnn模型;
24.第四步、确定迭代寻优方法选择出的最佳隐含层节点数为attention
‑
cnn模型的隐含层节点数;
25.第五步、利用adam算法和400组训练数据来训练attention
‑
cnn模型;
26.第六步、利用100组测试数据来测试训练好的attention
‑
cnn模型。
27.进一步地,所述attention
‑
cnn模型的由七层结构构成。
28.进一步地,所述attention
‑
cnn模型的七层结构具体如下:
29.模型的第一层为输入层,负责将输入样本导入到cnn网络,输入样本表示为:
30.t=(t1,t2,
……
t
n
);
31.其中,t
n
表示第n个输入变量;
32.模型的第二层为卷积层,该层在数据块上做卷积运动,负责提取输入层的空间特征,经过卷积层的输出可以表示为:
[0033][0034]
其中,和分别为卷积层中第j个神经元的输出与第i个神经元的输入,表示卷积层中的卷积核,f为卷积层的激活函数;
[0035]
第三层为池化层,该层通过最大池化的方式利用down函数对卷积层的输出进行降
采样,经过池化层的输出可以表示为:
[0036][0037]
其中,和分别为池化层中第m个神经元的输出与输入,为降采样函数的系数;
[0038]
第四层同为卷积层,其卷积过程与第二层相同;
[0039]
第五层为注意力层,注意力层根据不同的目标值为不同的信号段生成权重系数,并以加权平均值的形式组合来自不同信号段的信息,使重要的参数具有较大的权重,从而使回归预测模型具有更好的泛化性能,经过注意力层的输出表示为:
[0040][0041][0042][0043]
其中,为注意力层的第i个单元的输出,x
i
为注意力层的第i个单元的输入,α
i
为注意力层生成的对应x
i
的权重系数,f()为激活函数,且f()=tan;
[0044]
第六层为全连接层,全连接层的每个节点与注意力层所有节点相连,则全连接层的输出表示为:
[0045][0046]
其中,为全连接层的第k个单元的输出,w
jk
为注意力层中第j个单元与全连接层中第k个单元的权值,o
j
为注意力层的第j个单元的输出,b
k
为第k个单元阈值;
[0047]
第七层为回归层,输出p、i和d三个参数的值,根据这三个参数与溶解氧浓度变化e(t)的线性组合计算出氧气传输速率的值,其计算公式如下:
[0048][0049]
其中,e(t)表示溶解氧浓度变化,u(t)表示溶解氧的操作变量,即氧气传输速率。
[0050]
进一步地,所述attention
‑
cnn模型的训练过程如下:
[0051]
第一步、训练样本进行初次迭代时,首先对网络的权值进行随机初始化;
[0052]
第二步、计算模型输出与预测输出之间的误差值e
i
;
[0053]
第三步、计算出模型权重的更新值,其计算过程如下:
[0054]
δw
ij
=βσ
′
(u
i
)e
i
n
j
[0055]
其中,n
j
为第j个神经元的输出,e
i
为第二步所计算出来的误差,σ
′
为激活函数的导数,β为模型的学习率,u
i
为输出节点的加权和;
[0056]
第四步、在权值更新值上面加上动量这一元素,得到更新后的权值,其更新过程如下:
[0057]
w=w n=w δw
ij
α
η
‑
[0058]
其中,α表示常数,α的取值介于0~1之间,η表示动量,η
‑
表示前一个动量;
[0059]
第五步、通过adam法对attention
‑
cnn网络的各层进行训练,获得各层的更新权值。
[0060]
进一步地,所述通过训练后的attention
‑
cnn模型对pid控制器的p、i、d 三个参数进行动态调整,并获得溶解氧控制结果,具体如下:
[0061]
第一步、收集e与ec,并将其输入attention
‑
cnn模型,该模型的输出变量同时也是pid控制器的输入变量为p、i、d三个参数,pid控制器的输出变量则为氧气传输速率,通过操纵氧气传输速率来控制氧气的浓度;
[0062]
第二步、再次收集下一时刻的e与ec,将其输入attention
‑
cnn模型,然后对p、i、d三个参数进行调整,实现对溶解氧浓度的反馈控制。
[0063]
本发明的第二目的通过以下技术方案实现:
[0064]
一种基于深度学习的污水处理过程溶解氧控制系统,包括硬件部分和软件部分,硬件部分包括溶解氧水质参数仪、显示和操作装置、中央处理器、pid控制器组成,软件部分为基于attention
‑
cnn网络的溶解氧浓度预测模型;
[0065]
其中溶解氧水质参数仪模块是用来获取污水处理过程中的溶解氧浓度,中央处理模块是pc机,可根据不同要求进行自主配备,水质参数测量装置和中央处理装置之间通过usb接口进行数据通讯,pc机与pid控制器之间通过信号线连接;
[0066]
所述基于attention
‑
cnn网络的溶解氧浓度预测模型为溶解氧控制系统的核心,开发语言为matlab语言;水质参数测量模块获取的数据经过处理后作为模型的输入,从而建立基于attention
‑
cnn网络的软测量模型。
[0067]
进一步地,所述软件部分还能查询历史数据和越限报警。
[0068]
本发明与现有技术相比,具有如下优点和有益效果:
[0069]
本发明采用attention机制、迭代寻优方法及adam学习率算法对卷积神经网络进行训练优化,建立attention
‑
cnn模型。将e(t)和ec(t)的样本数据输入到 attention
‑
cnn模型,借助训练好的attention
‑
cnn模型能够准确预测出pid控制器的三个参数,通过这三个参数与溶解氧浓度变化e(t)的线性组合计算出氧气传输速率的值,进而对好氧池中氧气的浓度进行精准和平稳的控制。
附图说明
[0070]
图1是本发明所述一种基于深度学习的污水处理过程溶解氧控制方法的流程图;
[0071]
图2是本发明所述实施例中基于attention
‑
cnn
‑
pid控制器的模块结构图;
[0072]
图3是本发明所述实施例中基于attention
‑
cnn
‑
pid控制器的溶解氧浓度跟踪控制图;
[0073]
图4是本发明所述实施例中基于attention
‑
cnn
‑
pid控制器的溶解氧浓度误差图;
[0074]
图5是本发明所述一种基于深度学习的污水处理过程溶解氧控制系统的结构框图。
具体实施方式
[0075]
下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
[0076]
实施例:
[0077]
一种基于深度学习的污水处理过程溶解氧控制方法,实施流程如图1所示,基于活性污泥处理过程中的仿真基准1号(bsm1)模型中的pid控制器,充分利用卷积神经网络(cnn)的空间特征提取能力与注意力机制(attention)中的重要成分获取能力,利用attention
‑
cnn模型来动态调整pid控制器的三个参数,创建基于attention
‑
cnn
‑
pid的溶解氧复合控制器,对污水处理过程中的溶解氧浓度进行精准且平稳的控制,提高污水处理效率。
[0078]
具体过程如下:
[0079]
第一步、获取控制器模型的输入输出变量,输入变量包括溶解氧浓度变化 e(t)和溶解氧浓度变化率ec(t),输出变量包括p、i和d三个参数。
[0080]
第二步、采用迭代寻优的方法获取卷积神经网络的最佳隐含层数;
[0081]
s201、设置cnn隐含层节点数的范围为32~1024,步长设置为32;
[0082]
s202、将cnn网络的初始训练误差用max_mse表示,设置max_mse=2000,把当前所选取的隐含层节点数为m(i)时对应的每个输出变量的均方误差之和记作mse(i),其中i表示所选取的隐含层节点的顺序;
[0083]
s203、将”rand(
‘
state’,0)”命令输入到命令行,以保证每次迭代寻优时网络的初始化状态相同;
[0084]
s204、当mse(i)<max_mse时,则将max_mse的值赋值给当前的mse(i),并将此时选取的隐含层节点数m(i)记为de_m(i);
[0085]
s205、当所有候选的隐含层节点数目全部轮完一遍时,此时的max_mse即为训练的最小误差,对应的de_m(i)即为最佳隐含层节点数。
[0086]
最终确定最佳隐含层节点数为64;
[0087]
第三步、根据获取的输入输出样本与最佳隐含层数构建卷积神经网络cnn 模型;
[0088]
进一步地,所述attention
‑
cnn模型的具体结构由七层构成,如图2所示: 模型的第一层为输入层,负责将输入样本导入到cnn网络,输入样本可以表示为:t=(t1,t2,
……
t
n
);
[0089]
其中,t
n
表示第n个输入变量;
[0090]
模型的第二层为卷积层,该层在数据块上做卷积运动,负责提取输入层的空间特征,经过卷积层的输出可以表示为:
[0091][0092]
其中,和分别为卷积层中第j个神经元的输出与第i个神经元的输入,表示卷积层中的卷积核,f为卷积层的激活函数;
[0093]
第三层为池化层,该层通过最大池化的方式利用down函数对卷积层的输出进行降采样,经过池化层的输出可以表示为:
[0094][0095]
其中,和分别为池化层中第m个神经元的输出与输入,为降采样函数的系数;
[0096]
第四层同为卷积层,其卷积过程与第二层相同;
[0097]
第五层为注意力层,注意力层根据不同的目标值为不同的信号段生成权重系数,并以加权平均值的形式组合来自不同信号段的信息,使重要的参数具有较大的权重,从而使回归预测模型具有更好的泛化性能,经过注意力层的输出表示为:
[0098][0099][0100][0101]
其中,为注意力层的第i个单元的输出,x
i
为注意力层的第i个单元的输入,α
i
为注意力层生成的对应x
i
的权重系数,f()为激活函数,且f()=tan;
[0102]
第六层为全连接层,全连接层的每个节点与注意力层所有节点相连,则全连接层的输出表示为:
[0103][0104]
其中,为全连接层的第k个单元的输出,w
jk
为注意力层中第j个单元与全连接层中第k个单元的权值,o
j
为注意力层的第j个单元的输出,b
k
为第k个单元阈值;
[0105]
第七层为回归层,输出p、i和d三个参数的值,根据这三个参数与溶解氧浓度变化e(t)的线性组合计算出氧气传输速率的值,其计算公式如下:
[0106][0107]
其中,e(t)表示溶解氧浓度变化,u(t)表示溶解氧的操作变量,即氧气传输速率;
[0108]
第四步、利用adam学习率算法对cnn模型进行训练,并用attention机制获取cnn模型训练的重要成分,得到训练后的attention
‑
cnn模型;
[0109]
进一步地,所述attention
‑
cnn模型的训练过程如下:
[0110]
s401、训练样本进行初次迭代时,首先对网络的权值进行随机初始化;
[0111]
s402、计算模型输出与预测输出之间的误差值e
i
;
[0112]
s403、计算出模型权重的更新值,其计算过程如下:
[0113]
δw
ij
=βσ
′
(u
i
)e
i
n
j
[0114]
其中,n
j
为第j个神经元的输出,e
i
为第二步所计算出来的误差,σ
′
为激活函数的导数,β为模型的学习率,u
i
为输出节点的加权和;
[0115]
s404、在权值更新值上面加上动量这一元素,得到更新后的权值,其更新过程如下:
[0116]
w=w n=w δw
ij
α
η
‑
[0117]
其中,α表示常数,α的取值介于0~1之间,η表示动量,η
‑
表示前一个动量;
[0118]
s405、通过adam法对attention
‑
cnn网络的各层进行训练,获得各层的更新权值;
[0119]
第五步、利用训练后的attention
‑
cnn模型对pid控制器的p、i、d三个参数进行动态调整,根据这三个参数与溶解氧浓度变化e(t)的线性组合计算出氧气传输速率的值,并
获得溶解氧控制结果;
[0120]
此外,该溶解氧智能控制方法的实现在bsm1模型上完成,首先利用bsm1 离线生成500组数据,利用之前训练好的attention
‑
cnn模型对离线生成的数据进行处理,迅速预测出pid控制器中的三个参数值,进而根据pid线性公式计算出曝气速率,最后控制溶解氧的浓度,提高污水处理效率。图3和图4为基于attention
‑
cnn
‑
pid控制器的溶解氧浓度的控制器效果图,从图4可以看出该控制器对溶解氧浓度的控制误差主要位于
±
0.2mg/l,基于此结果可知该控制器能快速、精准的控制溶解氧的浓度。
[0121]
一种基于深度学习的污水处理过程溶解氧智能控制系统,适用于各种水体的溶解氧浓度跟踪控制,有利于对各种水体实现精准的曝气控制,本控制系统包括硬件部分和软件部分,硬件部分包括溶解氧水质参数仪、显示和操作装置、中央处理器、pid控制器组成,如图5所示,软件部分为基于attention
‑
cnn网络的溶解氧浓度预测模型;
[0122]
其中溶解氧水质参数仪模块是用来获取污水处理过程中的溶解氧浓度,中央处理模块是pc机,可根据不同要求进行自主配备,水质参数测量装置和中央处理装置之间通过usb接口进行数据通讯,pc机与pid控制器之间通过信号线连接;
[0123]
所述基于attention
‑
cnn网络的溶解氧浓度预测模型为溶解氧控制系统的核心,开发语言为matlab语言;水质参数测量模块获取的数据经过处理后作为模型的输入,从而建立基于attention
‑
cnn网络的软测量模型。
[0124]
进一步地,所述软件部分还能查询历史数据和越限报警。
[0125]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

