1.本发明属于工业机器人控制的技术领域,具体地涉及一种集群控制系统及方法。
背景技术:
2.随着工业生产规模不断扩大,大量流水线作业对操作工人的需求量大大增加,而劳动力成本的不断提高,制约着企业的发展;采用工业机械人代替人工作业,将大大降低企业对人工作业的依赖。工业机械臂是目前在工业机器人领域中得到最广泛实际应用的自动化机械装置,工业机械臂因具有生产效率高等特点,其在军事、航空航天制造、汽车制造、设备制造等工业制造领域中得到广泛的应用。
3.传统工业机械臂的控制系统大多采用信号线缆的方式与工业机械臂连接,此种控制方式存在诸多弊端:1、工业机械臂因过多的线缆存在造成占用空间大、维保困难,且灵活性不高;2、工业机械臂因过多的线缆存在通讯效率较低,易产生信号延迟,工作效率低;3、工业机械臂不能实现大规模集成及柔性化控制操作,无法实现群体智能控制。随着5g技术的快速发展和智能工业机械臂研究的不断深入,基于5g通讯的工业机械臂产品已成为当前社会关注的热点。目前,基于5g通讯的工业机械臂产品可以有效解决传统工业机械臂控制方式存在的占用空间大、维保困难、灵活性不高及工作效率低的问题。但是,仍然在信号的传输效率、时延现象和工业机械臂的大规模集成及柔性化控制操作等方面未取得较大改善。
技术实现要素:
4.为了解决上述技术问题,本发明通过云端单元中设置实时集群控制算法模块和时序数据控制模块,实时集群控制算法模块可实现控制大规模机械臂单元的集成及柔性化控制操作,且时序数据控制模块可实现同步协同所述机械臂单元和周边设备工作的一致性。
5.为了达到上述目的,本发明所采用的技术方案是:
6.一种集群控制系统,应用于大规模工业机器人的柔性化智能集群控制;所述集群控制系统包括:
7.至少一个机械臂单元,所述机械臂单元包括至少两个驱控一体化模组单元;
8.至少一个控制器单元,所述控制器单元与所述机械臂单元一一对应且通讯连接,用于控制与其相对应的所述机械臂单元动作;
9.云端单元,用于控制所述控制器单元,以使间接控制所述驱控一体化模组单元;
10.工业屏单元,所述工业屏单元与所述云端单元连接,用于展示及监控所述机械臂单元的实时工作状态;所述驱控一体化模组单元、所述控制器单元及所述云端单元内均包括5g通讯模块,以使所述控制器单元分别与所述驱控一体化模组单元及所述云端单元之间实现5g通讯连接;
11.较佳地,所述云端单元还包括实时集群控制算法模块和时序数据控制模块;所述实时集群控制算法模块实时接收mes或erp的不同数据,并将该不同数据转化为集群控制指
令,所述控制器单元接收集群控制指令以协同控制不同所述机械臂单元,实现对不同机械臂单元的集群控制;且所述时序数据控制模块接收周边设备的工作参数数据,并将该工作参数数据转化为时序数据控制指令,所述控制器单元接收时序数据控制指令以同步协同所述机械臂单元与周边设备工作的一致性。
12.相对于现有技术,本集群控制系统的有益效果为:通过5g通讯模块以使所述控制器单元分别与所述驱控一体化模组单元及所述云端单元之间实现5g通讯连接,提高模块之间的信号传输效率且改善信号时延,达到整体提升集群控制系统工作效率;并通过云端单元中的实时集群控制算法模块和时序数据控制模块,实时集群控制算法模块经5g通讯模块与实时控制算法模块通讯,以协同控制不同所述机械臂单元,以使控制大规模机械臂单元的集成及柔性化控制操作,且时序数据控制模块经5g通讯模块与实时控制算法模块通讯,经通用接口模块与其周边设备自动匹配对接,以使同步协同所述机械臂单元和周边设备工作的一致性。实现协同大规模机械臂单元的最优化节拍的集群控制,且实现机械臂单元与周边设备自动匹配对接的一体化控制,符合工厂智能发展的趋势。
13.较佳地,所述驱控一体化模组单元还包括传感器模块、电机模块、驱动器模块、制动器模块和减速机模块;所述5g通讯模块与所述驱动器模块连接,所述5g通讯模块接收到所述控制器单元的动作指令后,转化为驱动指令,所述驱动器模块接收到该驱动指令以驱动所述电机模块运作,并依次经所述传感器模块、所述制动器模块及所述减速机模块后,以使所述机械臂单元对外输出动作。
14.较佳地,所述5g通讯模块与所述驱动器模块的连接方式采用网络接口方式或者芯片集成方式。
15.较佳地,所述传感器模块收集所述机械臂单元的各种参数数据,收集的各种参数数据经所述5g通讯模块反馈至所述控制器单元,再经所述5g通讯模块反馈至所述云端单元,并通过所述工业屏展示出来。
16.较佳地,所述控制器单元还包括实时控制算法模块、数据监控模块、中断应急模块和数据处理模块;所述实时控制算法模块经所述5g通讯模块接收所述云端单元发出的动作指令,用于控制所述机械臂单元的运动参数。
17.较佳地,所述控制器单元还包括通用接口模块,所述实时控制算法模块与所述接口模块电连接以传递控制指令,以使所述机械臂单元匹配对接周边设备。
18.较佳地,所述通用接口模块用于自动检测并匹配对应的通讯协议设备,该通讯协议设备包括modbus rtu、modbus tcp、modbus ascii、opc da server或opc ua server。
19.较佳地,所述集群控制系统还包括示教器,所述示教器内包括5g通讯模块;在所述示教器中输入的调试编程程序,经所述5g通讯模块传输至所述实时控制算法模块,用于控制所述机械臂的调试动作。
20.一种集群控制方法,应用于大规模工业机器人的柔性化智能集群控制,包括上述的所述集群控制系统;所述集群控制方法包括以下步骤:
21.步骤s101:所述时序数据控制模块接收所述机械臂单元周边设备的工作参数数据,将其转化为时序数据控制指令,所述实时控制算法模块经所述5g通讯模块接收时序数据控制指令,通过所述通用接口模块匹配对接所述机械臂单元周边设备,使得同步协同所述机械臂单元和周边设备工作的一致性;
22.步骤s102:所述实时集群控制算法模块实时接收到调度工厂mes或erp的不同数据,并将其转化为集群控制指令,所述实时控制算法模块经所述5g通讯模块接收集群控制指令,并经所述数据处理模块处理将其转换成驱动指令输出;
23.步骤s103:不同所述机械臂单元内的所述5g通讯模块分别接收驱动指令,并将其传输给对应的所述驱动器模块,所述驱动器模块接收到该驱动指令以驱动所述电机模块运作,并依次经所述传感器模块、所述制动器模块及所述减速机模块后,使得不同的所述机械臂单元同时对外输出动作;
24.步骤s104:所述传感器模块收集不同所述机械臂单元的各种参数数据,收集的各种参数数据经所述5g通讯模块反馈至所述数据监控单元,再经所述5g通讯模块反馈至所述云端单元,并通过所述工业屏展示出来。
25.较佳地,所述步骤s101的步骤之前,还包括步骤s001~s002:
26.步骤s001:在所述示教器中输入的动作编程程序,经所述5g通讯模块传输至所述实时控制算法模块,并经所述实时控制算法模块处理转化成调试指令;
27.步骤s002:所述机械臂单元内的所述5g通讯模块接收调试指令,并将其传输给对应的所述驱动器模块,所述驱动器模块接收到该调试指令以驱动所述电机模块运作,并依次经所述传感器模块、所述制动器模块及所述减速机模块后,使得所述机械臂单元对外输出调试动作。
附图说明
28.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
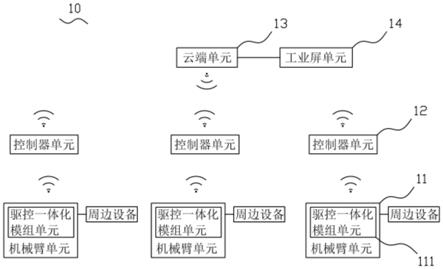
29.图1为本发明实施例一提供的集群控制系统的系统流程图;
30.图2为本发明实施例一提供的控制器单元的结构框图;
31.图3为本发明实施例一提供的云端单元的结构框图;
32.图4为本发明实施例一提供的驱控一体化模组单元的结构框图;
33.图5为本发明实施例一提供的示教器控制流程图;
34.图6为本发明实施例二提供的集群控制方法的流程图;
35.图7为本发明实施例三提供的集群控制方法的调试流程图。
36.附图标记说明:
37.10
‑
集群控制系统;
38.11
‑
机械臂单元、111
‑
驱控一体化模组单元、1111
‑
传感器模块、1112
‑
电机模块、1113
‑
驱动器模块、1114
‑
制动器模块、1115
‑
减速器模块;
39.12
‑
控制器单元、121
‑
实施控制算法模块、122
‑
数据监控模块、123
‑
中断应急模块、124
‑
数据处理模块、125
‑
通用接口模块;
40.13
‑
云端单元、131
‑
实时集群控制模块、132
‑
时序数据控制模块;
41.14
‑
工业屏单元;
42.15
‑
示教器。
具体实施方式
43.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明的实施例,而不能理解为对本发明的限制。
44.实施例一:
45.在本发明的实施例一中,如图1所示,一种集群控制系统10,应用于大规模工业机器人的柔性化智能集群控制。本实施例中,所述集群控制系统10包括:三个机械臂单元11、三个控制器单元12、云端单元13和工业屏单元14;其中,每一所述机械臂单元11包括三个驱控一体化模组单元111,所述驱控一体化模组单元111、所述控制器单元12及所述云端单元13内均包括5g通讯模块,使得所述控制器单元12分别与所述驱控一体化模组单元111及所述云端单元13之间实现5g通讯连接。具体地,所述云端单元13经5g通讯模块与所述控制器单元12通讯连接,所述控制器单元12与所述机械臂单元11一一对应设置,且通讯连接,所述云端单元13控制所述控制器单元12,以使间接控制所述驱控一体化模组单元111。
46.如图2所示,所述控制器单元12还包括实时控制算法模块121、数据监控模块122、中断应急模块123和数据处理模块124;所述实时控制算法模块121经5g通讯模块接收所述云端单元13发出的动作指令,用于控制所述机械臂单元11的运动参数。需要说明的是,此处运动参数指所述机械臂单元11输出动作的工作转速、工作节拍等参数。
47.如图3所示,所述云端单元13还包括实时集群控制算法模块131和时序数据控制模块132。具体地,所述实时集群控制算法模块131实时接收工厂mes或erp等信息系统的不同数据,并将该不同数据转化为集群控制指令,所述实时控制算法模块121经5g通讯模块接收集群控制指令处理后,再经5g通讯模块控制三个所述机械臂单元12,以协同控制三个所述机械臂单元12,实现对三个所述机械臂单元12的集群控制。
48.如图2所示,所述控制器单元12还包括通用接口模块125,所述时序数据控制模块132接收周边设备的工作参数数据,并将该工作参数数据转化为时序数据控制指令,所述实时控制算法模块121经5g通讯模块接收时序数据控制指令处理后,与所述实时控制算法模块121电连接的所述通用接口模块125传递控制指令,以使所述机械臂单元11匹配对接周边设备,实现同步协同三个所述机械臂单元11与周边设备工作的一致性。需要说明的是,此处工作的一致性是指所述机械臂单元11与其配套的周边设备保持生产节拍等参数相一致。本实施例中,所述通用接口模块125用于自动检测并匹配对应的通讯协议设备,该通讯协议设备为modbus rtu。具体的检测及匹配的步骤包括:程序初始化、扫描接口程序列表、逐条匹配、成功则停止,若逐条匹配未成功继续返回直至匹配成功才停止。需要说明的是通讯协议设备也可以为modbus tcp、modbus ascii、opc da server或opc ua server。
49.如图4所示,所述驱控一体化模组单元111还包括传感器模块1111、电机模块1112、驱动器模块1113、制动器模块1114和减速机模块1115。本实施例中,5g通讯模块与所述驱动器模块1113连接;其中,5g通讯模块与所述驱动器模块1113的连接方式采用网络接口方式。具体地,5g通讯模块接收到所述控制器单元12的动作指令后,转化为驱动指令,所述驱动器模块1113接收到该驱动指令以驱动所述电机模块1112运作,并依次经所述传感器模块1111、所述制动器模块1114及所述减速机模块1115后,以使所述机械臂单元11对外输出动
作。当然,5g通讯模块与所述驱动器模块1113的连接方式也可采用将所述5g通讯模块集成至所述驱动器模块1113内,以实现5g通讯模块与所述驱动器模块1113的连接。
50.进一步地,所述工业屏单元14与所述云端单元13连接,用于展示及监控所述机械臂单元11的实时工作状态。具体地,所述传感器模块1111收集所述机械臂单元11的各种参数数据,收集的各种参数数据经5g通讯模块反馈至所述控制器单元12,再经5g通讯模块反馈至所述云端单元13,并通过所述工业屏单元14展示出来。通过所述工业屏单元14将整个控制系统实时数据展示出来,使其实时监控现有工作状态,并呈现报警信息,有利于整个车间智能化生产状态的监控,指令下达以及设备维护。需要说明的是,此处各种参数数据包括所述机械臂单元的作业效率、功耗,生产节拍、报警信息等数据参数。
51.如图5所示,所述集群控制系统10还包括示教器15,所述示教器15内包括5g通讯模块;在所述示教器15中输入的调试编程程序,经5g通讯模块传输至所述实时控制算法模块121,所述实时控制算法模块121接收到调试编程程序处理后,再经5g通讯模块与所述机械臂单元11通讯连接,以使控制所述机械臂单元11的调试动作。
52.本实施例的集群控制系统的有益效果为:
53.1、所述机械臂单元包括的所述驱控一体化模组单元采用驱控制一体化设计,并采用5g通讯模块收发控制信息,取消传统通讯线缆信号连通方式,具有结构紧凑、占用空间小、信号传输快及便于维护等特点。
54.2、所述控制器单元包括所述通用接口模块,结合所述实时控制算法模块及所述云端单元中的时序数据控制模块的5g通讯连接,可以实现所述机械臂单元与其周边设备匹配对接且一体化控制,便于集群化控制。
55.3、所述云端单元中的所述实时集群控制算法模块,结合所述控制器单元中的所述实时控制算法模块,可以兼容多台机器人集中控制,协调不同的机器人实现最优化节拍作业控制,符合工厂智能发展趋势。
56.4、所述工业屏单元与所述云端单元连接,可以同时显示不同所述机械臂单元作业的效率、功耗,生产节拍、报警信息等参数信息,有利于整个车间智能化生产状态的监控。
57.另外,需要说明的是,本发明的集群控制系统中,所述机械臂单元及所述控制器单元的数量不局限三个,可以根据具体车间布设情况或者具体生产情况设置,仅需确保所述机械臂单元数量与所述控制器单元的数量一致即可。
58.实施例二:
59.在本发明的实施例二中,如图6所示,一种集群控制方法,应用于大规模工业机器人的柔性化智能集群控制,包括上述的所述集群控制系统;所述集群控制方法包括以下步骤:
60.步骤s101:所述时序数据控制模块接收所述机械臂单元周边设备的工作参数数据,将其转化为时序数据控制指令,所述实时控制算法模块经所述5g通讯模块接收时序数据控制指令,通过所述通用接口模块匹配对接所述机械臂单元周边设备,使得同步协同所述机械臂单元和周边设备工作的一致性。
61.步骤s102:所述实时集群控制算法模块实时接收到调度工厂mes或erp的不同数据,并将其转化为集群控制指令,所述实时控制算法模块经所述5g通讯模块接收集群控制指令,并经所述数据处理模块处理将其转换成驱动指令输出。
62.步骤s103:不同所述机械臂单元内的所述5g通讯模块分别接收驱动指令,并将其传输给对应的所述驱动器模块,所述驱动器模块接收到该驱动指令以驱动所述电机模块运作,并依次经所述传感器模块、所述制动器模块及所述减速机模块后,使得不同的所述机械臂单元同时对外输出动作。
63.步骤s104:所述传感器模块收集不同所述机械臂单元的各种参数数据,收集的各种参数数据经所述5g通讯模块反馈至所述数据监控单元,再经所述5g通讯模块反馈至所述云端单元,并通过所述工业屏展示出来。
64.本实施例的集群控制方法可以根据具体生产所需控制车间大规模的所述机械臂单元与其对应配套的周边设备匹配对接、且一体化控制,并所述云端单元通过所述控制器单元实现兼容不同所述机械臂的集中控制,协调不同的所述机械臂达到最优化节拍运作,且不同所述机械臂单元作业的效率、功耗,生产节拍、报警信息等参数信息通过所述工业屏展示出来,有利于整个车间智能化生产状态的监控,符合工厂生产智能化控制的发展趋势。
65.实施例三:
66.在本发明的实施例三中,如图7所示,一种集群控制方法,应用于大规模工业机器人的柔性化智能集群控制,所述集群控制系统还包括示教器,在实施例二的步骤s101的步骤之前,还包括步骤s001~s002:
67.步骤s001:在所述示教器中输入的动作编程程序,经所述5g通讯模块传输至所述实时控制算法模块,并经所述实时控制算法模块处理转化成调试指令;
68.步骤s002:所述机械臂单元内的所述5g通讯模块接收调试指令,并将其传输给对应的所述驱动器模块,所述驱动器模块接收到该调试指令以驱动所述电机模块运作,并依次经所述传感器模块、所述制动器模块及所述减速机模块后,使得所述机械臂单元对外输出调试动作。
69.本实施例的集群控制方法中调控过程为:所述示教器经所述控制器单元实现所述机械臂单元的调试动作,在所述示教器中完成所述机械臂单元的调试编程程序,通过5g通讯功能,把调试编程程序传输到在实时控制算法单元中,用来控制所述机械臂单元做相应的调试动作。
70.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

