1.本发明属于远程驾驶的技术领域,具体涉及一种设置有外景采集系统的远程驾驶系统。
背景技术:
2.专利文件cn110083154a公开了一种汽车自动驾驶控制系统,该发明虽然能够实现车辆的自动和半自动驾驶,但无法在车辆驾驶员出现特殊情况时代替驾驶员实现远程驾驶控制,为驾驶员的生命安全提供保障;自动驾驶车辆(autonomous vehicles;self
‑
driving automobile)又称无人驾驶车辆、电脑驾驶车辆或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能车辆;目前,随着经济发展和国家建设的需求,各种各样的无人驾驶汽车正在被制造出来;但由于无人驾驶汽车研究现处于初始阶段,其安全性较差,现阶段还无法完全替代人为直接驾驶的;但对于一些特殊情况人为驾驶又无法解决,如,在开车途中突然不适,或聚会喝酒后,或者工程车辆由于工作环境恶劣,安全性差,驾驶员劳动强度大等。
3.现有的驾驶系统分为两种,即无人驾驶和人为驾驶,其无人驾驶研究现处于初始阶段,其安全性较差,现阶段无法完全替代人为直接驾驶;而人为驾驶在面对一些特殊情况则无能为力,无法在车辆驾驶员出现特殊情况时代替驾驶员实现远程驾驶控制,为驾驶员的生命安全提供保障;为此,我们提出一种设置有外景采集系统的远程驾驶系统。
技术实现要素:
4.有鉴于此,本发明提供了一种设置有外景采集系统的远程驾驶系统,能够实时获取无人驾驶车辆的各类外部环境信息以及车辆内部信息,保证无人驾驶车辆的远程驾驶安全。
5.实现本发明的技术方案如下:
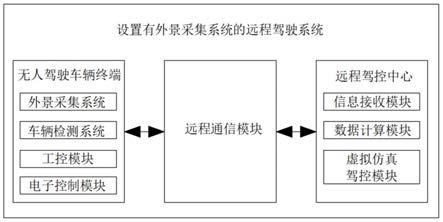
6.一种设置有外景采集系统的远程驾驶系统,包括无人驾驶车辆终端、远程通信模块和远程驾控中心;
7.其中,所述无人驾驶车辆终端包括外景采集系统、车辆检测系统、工控模块和电子控制模块;所述外景采集系统包括图像采集模块、距离感知模块、北斗定位模块和音频接收模块;所述车辆检测系统包括方向盘转角检测模块、行驶速度检测模块和电池检测模块;
8.所述远程驾控中心包括信息接收模块、数据计算模块和虚拟仿真驾控系统;所述虚拟仿真驾控系统包括三维构建模块、三维显示模块和仿真驾驶模块,所述仿真驾驶模块与电子控制模块通信连接;
9.所述图像采集模块用于实时采集无人驾驶车辆四周的环境图像信息;所述距离感知模块用于实时获取四周障碍物与无人驾驶车辆的距离与角度信息;所述北斗定位模块用于实时采集无人驾驶车辆的地理位置信息;所述音频接收模块用于实时获取无人驾驶车辆外围环境所发出的音频信息;
10.所述方向盘转角检测模块用于实时获取无人驾驶车辆的方向盘转角信息;所述行
驶速度检测模块用于实时获取无人驾驶车辆行驶过程中的时速信息;所述电池检测模块用于实时检测无人驾驶车辆的供电能源信息;
11.所述工控模块用于将环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息进行差分放大、滤波和模数转换处理;所述远程通信模块用于将处理后的环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息远距离传输给远程驾控中心;
12.所述信息接收模块用于接收处理后的环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息,同时将其分发至数据计算模块和虚拟仿真驾控系统;所述数据计算模块用于对环境图像信息、距离与角度信息、地理位置信息、方向盘转角信息、时速信息和供电能源信息进行仿真计算,形成三维仿真数据;所述三维构建模块用于根据三维仿真数据进行虚拟三维仿真建模,形成仿真驾驶环境;所述三维显示模块用于将仿真驾驶环境进行可视化展示;
13.所述仿真驾驶模块用于远程操控人员根据可视化的仿真驾驶环境和音频信息向远程无人驾驶车辆发送控制命令;所述电子控制模块用于接收控制命令,并根据控制命令对无人驾驶车辆进行驾驶控制。
14.进一步地,所述图像采集模块为摄像设备。
15.进一步地,所述距离感知模块包括激光雷达或毫米波雷达。
16.进一步地,所述音频接收模块为拾音器。
17.进一步地,所述方向盘转角检测模块为转矩传感器。
18.进一步地,所述远程通信模块为5g通信网络。
19.有益效果:
20.1、本发明包括有外景采集系统和车辆检测系统,其能够实时获取无人驾驶车辆的各类外部环境信息以及车辆内部信息,从而有利于辅助远程操控人员全方位的了解无人驾驶车辆的现场驾驶环境和车辆驾驶状况;此外本发明以5g通信网络为信息传输媒介,从而能够有效降数据上传和控制命令发送的延迟,进而有利于保证无人驾驶车辆的远程驾驶安全;
21.2、本发明设置有虚拟仿真驾控系统,其包括三维构建模块、三维显示模块和仿真驾驶模块,其中三维构建模块通过各类外部环境信息以及车辆内部信息进行是三维建模,形成仿真驾驶环境,并通过三维显示模块进行可视化显示,而且仿真驾驶模块与电子控制模块通信连接,从而有利于提高远程操控人员的驾驶感觉,进而有利于在车辆驾驶员出现特殊情况时代替驾驶员实现远程驾驶控制,为驾驶员的生命安全提供保障。
附图说明
22.图1为本发明的远程驾驶系统的整体结构示意图。
具体实施方式
23.下面结合附图并举实施例,对本发明进行详细描述。
24.参照图1,本实施例公开了一种设置有外景采集系统的远程驾驶系统,包括无人驾驶车辆终端、远程通信模块和远程驾控中心;
25.其中,无人驾驶车辆终端包括外景采集系统、车辆检测系统、工控模块和电子控制模块;远程驾控中心包括信息接收模块、数据计算模块和虚拟仿真驾控系统;外景采集系统包括图像采集模块、距离感知模块、北斗定位模块和音频接收模块;车辆检测系统包括方向盘转角检测模块、行驶速度检测模块和电池检测模块;虚拟仿真驾控系统包括三维构建模块、三维显示模块和仿真驾驶模块,仿真驾驶模块与电子控制模块通信连接。
26.图像采集模块具体为摄像设备,用于实时采集无人驾驶车辆四周的环境图像信息,该摄像设备型号具体为rs
‑
702c48
‑
12v,其需要安装在无人驾驶车辆的前后杆和两侧车门处。
27.距离感知模块具体为激光雷达,用于实时获取四周障碍物与无人驾驶车辆的距离与角度信息,该激光雷达型号具体为rplid
‑
a2;或者,距离感知模块也可为毫米波雷达,其具体型号为ars408
‑
21。
28.北斗定位模块用于实时采集无人驾驶车辆的地理位置信息;
29.音频接收模块具体为拾音器,用于实时获取无人驾驶车辆外围环境所发出的音频信息。
30.方向盘转角检测模块具体为转矩传感器,用于实时获取无人驾驶车辆的方向盘转角信息;
31.行驶速度检测模块用于实时获取无人驾驶车辆行驶过程中的时速信息;
32.电池检测模块用于实时检测无人驾驶车辆的供电能源信息。
33.工控模块用于将环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息进行差分放大、滤波和模数转换处理,其具体处理过程如下:首先利用8个差分放大器对环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息进行放大,然后利用高低滤波器对放大后的环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息进行滤波去噪;最后通过模电转换器对滤波去噪后的环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息进行电模转换;
34.远程通信模块具体为5g通信网络,用于将处理后的环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息远距离传输给远程驾控中心。
35.信息接收模块用于接着处理后的环境图像信息、距离与角度信息、地理位置信息、音频信息、方向盘转角信息、时速信息和供电能源信息,同时将其分发至数据计算模块和虚拟仿真驾控系统,具体的,将环境图像信息、距离与角度信息、地理位置信息、方向盘转角信息、时速信息和供电能源信息发送至数据计算模块,将音频信息发送至虚拟仿真驾控系统;
36.数据计算模块用于对环境图像信息、距离与角度信息、地理位置信息、方向盘转角信息、时速信息和供电能源信息进行仿真计算,形成三维仿真数据;
37.三维构建模块用于根据三维仿真数据进行虚拟三维仿真建模,形成仿真驾驶环境,具体的,该仿真驾驶环境采集用vr虚拟技术实现,其包括车外场景和车内驾驶场景;
38.三维显示模块用于将仿真驾驶环境进行可视化展示,具体的,该三维显示模块具体为头戴式立体三维vr显示器。
39.仿真驾驶模块用于远程操控人员根据可视化的仿真驾驶环境和音频信息向远程无人驾驶车辆发送控制命令;具体的,该仿真驾驶模块主要通过车辆模拟器实现,该车辆模拟器通过识别远程操控人员的驾驶动作,形成控制命令,直接传输给电子控制模块。
40.电子控制模块用于接收控制命令,并根据控制命令对无人驾驶车辆进行驾驶控制。
41.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

