无人机系统控制方法、无人机系统、计算机设备和存储介质
1.引用并入
2.本技术要求于2020年3月25日提交的、申请号为62/994,576、发明名称为“无人机系统通信”的美国临时申请的优先权以及于2020年10月30日提交的美国申请第17/085,083号、发明名称为“无人机系统通信系统和方法”的优先权,其全部内容通过引用并入本技术中。
技术领域
3.本技术涉及计算机控制技术,尤其涉及一种无人机系统控制方法、无人机系统、计算机设备和存储介质。
背景技术:
4.目前,无人机(uav)并不能获得从空域的角度来看其飞行是否合法的实时信息,导致在不被允许时,还在限制空域进行操作。由于uav飞行员不需要获得许可,他们甚至可能不知道什么是管制空域,或者如何避开它。因此需要一些技术手段来至少通知飞行员和/或避免飞行进入限制空域。
技术实现要素:
5.针对上述技术问题以及其他问题,本技术实施例提供了相应的解决方案。
6.本技术实施例提供了一种无人机系统控制方法,包括:
7.获取第一数字信息,所述第一数字信息用于指示所述无人机系统中无人机的位置;
8.获取第二数字信息,所述第二数字信息用于识别飞行员通告notam的区域;
9.基于所述第一数字信息和所述第二数字信息,将所述无人机的位置与所述区域进行比较,确定是否发生空域侵犯;及,
10.根据确定的结果,控制所述无人机系统警告所述无人机系统的用户已发生空域侵犯或可能发生空域侵犯,或控制所述无人机自动返回或着陆。
11.本技术实施例还提供了一种无人机系统,包括:
12.无人机;
13.控制器,用于与所述无人机进行无线通信,并且控制所述无人机;
14.其中,所述无人机和所述控制器中的至少一个包括:
15.至少一个处理器;
16.存储器,包括计算机代码,所述计算机代码用于,当由所述至少一个处理器执行时,控制所述至少一个处理器:
17.获取第一数字信息,所述第一数字信息用于指示所述无人机系统中无人机的位置;
18.获取第二数字信息,所述第二数字信息用于识别飞行员通告notam的区域;
19.基于所述第一数字信息和所述第二数字信息,将所述无人机的位置与所述区域进行比较,确定是否发生空域侵犯;及,
20.根据确定的结果,控制所述无人机系统警告所述无人机系统的用户已发生空域侵犯或可能发生空域侵犯,或控制所述无人机自动返回或着陆。
21.本技术实施例还提供一种计算机设备,包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行,以实现上述无人机系统控制方法。
22.本技术实施例还提供一种非暂时性计算机可读介质,其上存储有指令,当所述指令由计算机执行时,使得所述计算机执行上述无人机系统控制方法。
23.本技术实施例还提供一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述无人机系统控制方法。
24.由上述技术方案可见,本发明实施例提供的方法,实现了对无人机系统内无人机飞行的控制,当确定无人机已经进入限制空域或者可能发生碰撞时,可以采取纠正动作,例如通知飞行员、自动返回和/或自动着陆,从而提高了无人机系统的通信功能,保障了飞行安全。
附图说明
25.根据以下详细说明和附图,所公开的主题的进一步的特征、性质和各种优点将更加显而易见,其中:
26.图1是根据本技术一实施例的无人机系统(uas)的示意图;
27.图2是根据本技术一实施例的包括uas通信以及uas服务系统的uas的示意图;
28.图3是根据本技术一实施例的第一图的示意图;
29.图4是根据本技术一实施例的第二图的示意图;
30.图5是根据本技术一实施例的包括uas的系统的示意图;
31.图6是根据本技术另一实施例的包括uas的系统的示意图;
32.图7a示出了根据本技术一实施例的rest位置查询的示意图;
33.图7b示出了根据本技术一实施例的json回复的示意图;
34.图8a示出了根据本技术一实施例的参数表的第一部分;
35.图8b示出了根据本技术一实施例的参数表的第二部分;
36.图9示出了根据本技术一实施例的uas的计算机代码结构图;以及
37.图10示出了根据本技术一实施例的计算机设备的示意图。
具体实施方式
38.参考图1,无人机系统(uas)(100)可包括无人机(uav)(101)和控制器(102)。控制器(102)可使用数据链路(103)将控制命令从控制器(102)通信到uav(101)。控制器(102)可以包括至少一个通信电路,该至少一个通信电路被配置为经由甚高频(vhf)、超高频(uhf)或模拟或数字无线电传输的其它无线技术提供通信,来组成数据链路(103)。控制器(102)
经由数据链路(103)可控制uav(101)的发动机(114)的功率水平或uav(101)的控制表面。也可以使用更抽象的命令,例如俯仰、偏航和滚转,类似于直升机或飞机的命令。经验丰富的飞行员可以利用这些基本控制来操作一些uav,而不依赖于uav内控制信号的任何先进机载处理。uav已经具有许多形式,包括直升机和飞行器。
39.最近,机载电子设计的进展允许将某些任务从操作人员卸载到uav本身。如今,许多uav包括至少一个传感器(104),其向uav(101)的机载控制器(105)指示uav(101)的特征,例如,uav(101)的姿态和加速度。机载控制器(105)可以是具有按比例缩小的用户界面或不存在用户界面的计算机设备。除了由数据链路(103)从控制器(102)接收的控制输入之外,由至少一个传感器(104)获取的信息可以使得uav(101)保持稳定,除非从控制器(102)获取正控制输入。
40.甚至最近,uav可包括接收器(106),该接收器(106)被配置为从全球导航卫星系统(gnss)(诸如由美国运营的全球定位系统(gps))之一接收通信。图1图示了单一卫星(108),其提供信号(107)作为此类通信,以表示gnss。然而,uav(101)的接收器(106)可从gnss接收通信,gnss包括三个或更多个,并且通常是四个或更多个视线(line of sight)卫星,以对uav(101)在空间中的位置进行三角测量。接收器(106)(其可为gnss接收器)可以相当准确地确定uav(101)在空间和时间上的位置。在一些uav中,可通过uav(101)在垂直(z
‑
)轴上的附加传感器(诸如超声波或lidar传感器)来增强gnss以实现软着陆(未示出)。根据一些实施例,uav(101)可被配置为基于gnss功能执行诸如“飞回”和“自动着陆”的特性,其中uav(101)飞到它的起始位置。此类特性可由uav(101)基于来自控制器(102)的简单命令(如:按下单个按钮)来执行,或者,当来自控制器(102)的数据链路(103)丢失时执行,或者当其他有意义的控制输入超时时执行。
41.作为另一最新发展,uav(101)还可包括至少一个摄像机(109)。在一些情况下,uav(101)包括由万向架支承的摄像机作为摄像机(109)中的一个,并且可被用于记录图片和视频,其质量足以满足uav用户——如今,通常以高清晰度电视分辨率。在一些情况下,uav(101)包括其它摄像机(110),通常覆盖运动的一些轴或所有轴,并且uav(101)可被配置为基于来自摄像机(110)的信号执行机载信号处理,以避免与固定物体和移动物体发生碰撞。
42.在一些情况下,uav(101)包括“主”摄像机作为摄像机(109)中的一个,并且其摄像机信号可通过uav(101)的通信接口(例如,通信电路)经由数据链路(111)实时地通信给人类用户,并显示在显示设备(112)上,显示设备(112)可被包含在控制器(102)中、附接于控制器(102)中或与其分离。数据链路(111)可与数据链路(103)相同或不同。因此,使用被称为“第一人称视角”(fpv)的技术,uav可以成功地飞离人类飞行员的视线。
43.由于这些技术及其它技术的发展,uav已经变得相当容易飞行,这又使得它们不仅受到专业uav飞行员、有决心且富裕的业余爱好者的欢迎,而且也受到普通大众的欢迎。因此,与大约15年前的数千架(如果有那么多)直升机相比,现在每年售出数百万架无人机。同时,用户群体的知识、熟练程度和参与程度,在平均水平上已经有所降低。
44.除了可能最小的uav之外,所有uav都可能对载人航空造成危害,这不仅由于空中碰撞,而且还由于飞行员的分心、空中交通管制(atc)资源饱和等等。在某些天里同时飞行的成千上万的uav,以及(平均并且当与载人飞行器的飞行员比较时)技术不足的、训练不足的、不知情的且偶尔不顾后果的uav飞行员的组合,已经导致花费了数百万美元在中断起
飞、错过进场、改道、载人飞行器的停飞、因例如载人空中资源无法扑灭的野火等造成的财产损失,等等。已有报道称,业余驾驶的uav和直升机之间的空中碰撞造成了人员伤亡。由于这些和其它原因,包括联合国国际民用航空组织(icao)和美国联邦航空管理局(faa)在内的监管机构已经开始对uav进行监管,包括重量小于55磅的小型uav。更重的uav已在过去受到监管。
45.在美国,此类监管的一个方面是要求飞行员在进行几乎所有商业的(供租用)uav操作时,必须持有“远程飞行员证书”。该证书的主要目的不是针对uav的机械方面,而是针对对监管的理解和遵守,包括例如空域、飞行限制等。虽然商业远程飞行员可通过获取证书而意识到他/她在遵守包括空域在内的uav操作的规则和监管等方面的义务,但业余爱好者没有充分意识到这一点。uas变得如此便宜和易于操作,以至于通过模型飞机俱乐部和类似组织获得能力的历史方法也无法可靠地发挥作用。例如,相当多的uav在模型飞机俱乐部所维护的飞行场地之外由个人操作,这些人从来没有加入过此类俱乐部,而且可能从来没有研究过相关监管,更不用说获取过关于当前空域布局的简报。
46.所提出的用于监管的另一方面包括识别uav及其到atc、其它uav等的飞行。在美国,faa于2019年12月31日发布了题为“无人机系统的远程识别”的“拟议规则”(第2019
‑
28100号文件)。当基本上所有uas实施拟议规则时,将使atc在任何给定时刻对uav活动有一定的了解。拟议规则还要求如果uas和与atc接口的系统(被称为uav服务供应商(uss))之间的报告机制在uav在空中时处于非活动状态,要装备uas以通知飞行员。然而,不同于载人飞行器在管制空域中的许多操作要求机组人员与atc、squawk应答机代码等进行(语音)联系,在拟议规则中并未设想此类要求,并且在没有大量增加atc资源的情况下此类要求也可能是不实际的。就此而言,虽然faa通过uss可以获取一定量的现有uav操作的实时知识,但是“拟议规则”并未设想atc对uav飞行产生直接的(通过技术手段)或间接(通过与飞行员的通信)的影响。相反,拟议规则旨在通知atc关于与atc的任务有关的uav操作。
47.参考图2,uas(200)可包括uav(201)和控制器(202)。uav(201)和控制器(202)分别与图1所示的uav(101)和控制器(102)相同或相似。根据本技术实施例,可能由人类飞行员(203)操作的uas(200)可被配置为根据“拟议规则”实时通知至少一个uss(204)关于uav(201)的位置。可以使用因特网(205)进行报告。对于除涉及系留(tethered)uav的最奇异的使用案例之外的所有其他情况,这意味着uav(201)和uas(200)的控制器(202)中的一者或两者,可被配置为具有通过诸如网络(207)(例如,5g网络)等无线网络到因特网(205)的连接(206),并且uss(204)也可具有到因特网(205)的连接(208)。对于拟议规则,可以假设此类场景,并且也可在本技术假设此类场景,但是本技术的实施例不限于此。也可以使用因特网(205)以外的网络。例如,可以设想,非因特网的闭合无线网络可被用于uas(200)与uss(204)之间的通信。闭合无线网络可被用于某些军用uav。当此后提到“因特网”时,意味着包括此类网络。
48.许多物理无线网络技术可被部署在应用中,使得连接(206)(例如,无线连接)和网络(207)(例如,无线网络)能够将系统(诸如uas(200)的控制器(202)或uav(201))连接到因特网(205)。对于室外应用,可以使用移动网络,例如,第5代或“5g”网络。此后,可以假设使用此类5g网络,但是本技术的实施例不限于此。同样可以采用其它物理网络技术,包括例如3g、3.5g、4g、lte移动网络、基础设施或自组织模式中的无线lan、无线个域网等。在本技术
的实施例中,承载因特网的移动网络可提供双向通信,例如,uas(200)与uss(204)之间的通信。然而,每个方向上的服务质量可能不同。根据本技术的实施例,uav(201)、控制器(202)和/或uss(204)可包括通信接口(包括例如发送器和/或接收器)和至少一个处理器,该处理器具有实施至少一种物理无线网络技术的存储器,以便被配置为经由本技术的至少一种网络类型进行通信。
49.参考图2,因特网(205)通过网络(207)(例如,5g网络)到uav(201)和/或控制器(202)之间的连接(206)可以是双向的。当使用诸如因特网协议(ip)、传输控制协议(tcp)、用户数据报协议(udp)、超文本传输协议(http)、快速udp因特网连接(quic)等因特网协议,用于uas(200)与uss(204)(如拟议规则所设想的)之间的通信时,根据此类协议的性质,这些协议可能需要双向链路进行工作。此外,拟议规则包括要求大概由控制器(202)或uav(201)本身通知人类飞行员(203)有关uas(200)与uss(204)之间失去通信的情况,这可以通过uss(204)与uas(200)之间的数据链路来实现——这又可能需要双向通信。因此,出于此类原因,连接206可以是双向的。
50.空中交通管制(atc)当局,例如faa,或者由atc当局授权的政府或私人主管部门或实体,先前不仅发布了法规,而且发布了关于(载人和无人)飞行器所操作的空域布局的各种形式的图形、文本或口头信息。从历史上看,在不同时期可以通过印刷图、每周出版物和文本信息(例如,通过传真、电话或由飞行服务专家亲自提供)获得相关信息,现在,在包括美国的大多数国家,尽管来源不同,但可通过因特网获得相关信息。例如,此类相关信息可以包括以下:
51.(a)图:在不同的国家和出于不同的目的(例如,低/高空、视觉/仪器飞行规则、规划等)可获得许多不同类型的航空图。对于小型uav的操作,特别相关的是美国剖面图以及“低空授权和通知能力”(laanc)信息,其可以在网络浏览器上以图的形式显示。可按相对长期的周期对图进行更新(例如;vfr截面图:每六个月更新一次)。对于载人飞行器,可能需要使用“有效”图。参考图3,图示了以加利福尼亚利弗莫尔机场(301)为中心的剖面图(300)的摘录。应当注意,剖面图是彩色的,并且颜色具有意义。然而,剖面图(300)的黑白表示,足以示出休闲uav飞行员在解释剖面图时可能遇到的困难。机场周围的虚线圆圈(直径大约8英里)表示空域(302),其在某些时间(当利弗莫尔机场的方向开放时)是“d类”空域,这意味着未经atc事先批准,不得在该圆圈内操作(有人驾驶)飞行器并达到某一高度。从历史上看,同样的规则适用于uav,从而导致uav在利弗莫尔镇的大部分地区(到利弗莫尔机场的东/右边)及周边地区的飞行是非法的。
52.由于认识到对载人飞机操作的要求可能对娱乐性无人机过于严格,因此faa最近允许在管制空域的某些区域飞行娱乐性无人机。参考图4,图示了图(400)的一部分,其是faa通过因特网电子发布并显示在web浏览器中的“uav图”的示例。同样,此类图中的颜色是有意义的,但出于本技术的目的,黑/白表示足以示出图(400)的各方面。如图4所图示,类似于图3,在利弗莫尔机场的周围设有8英里的圆圈,其指示空域(404)。在图(400)的原始版本中,圆圈用蓝色表示。圆圈所覆盖的区域(表示管制空域)被矩形块(405)覆盖。每个此类块(405)的大小大约为一平方英里。每个块(405)可包含标识符(例如,数字),其指示uav在未经事先许可的情况下允许在块(405)内飞行的最大允许高度。可以是使用某些机制(以应用程序的形式),允许某些uav操作员获取高于标识符所指示的块上限上进行飞行的许可。
53.(b)飞行员通告(notam):这些文本通知可具有国际公认的标准格式,并用简明英语书写。文本通知可以在几分钟或几小时内快速发布,这与更新周期以周和月为单位进行测量的图不同,但其有效时间可以从几小时变化到“无限期”或“直到另行通知”。notam的许多目的之一可以是更新图的某些方面。例如,航空图可包括关于诸如高塔等导航障碍物的信息。当架设高于某一阈值(除其它因素外,该阈值由场地与现有机场的进场通道的接近程度决定)的临时起重机时,它可能构成航行危险,因此,可以notam的形式提供其存在、位置、高度和预期的存在持续时间。指示在机场(圣卡洛斯机场,ksql)附近存在起重机的notam示例,如下所示:
54.ksql san carlos
55.!sql 10/003sql obst crane(asn 2018
‑
awp
‑
13591
‑
oe)372917n1221327w(1.9nm se sql)309ft(300ft agl)flagged and lgtd 1910072355
‑
2001312159
56.创建于:2019年10月07日23:55:00
57.来源:sql
58.(c)临时飞行限制(tfr):tfr是notam的一种类型,其可以通知飞行员或机组人员那些需要特殊atc许可进入的空域。tfr可以提前宣布(例如,覆盖长期规划的体育赛事以外的区域),或者实时发布(例如,在发生野火的情况下)。以下所示的是可能与火灾或类似危险相关的tfr的示例;tfr只在一个小时内有效:
59.fdc 9/1767zmp mn..airspace hibbing,mn..temporary flight restrictions wi an area defined as 2nm radius of 472601n0930200w(hibbing vor/dme hib299015.6)sfc
‑
4500ft blasting./暂时飞行限制区域,出现爆炸
60.pursuant to 14cfr section 91.137(a)(1)temporary flight restrictions are in effect./暂时飞行限制区域起效
61.only relief acft ops under direction of hibbing taconite are auth in the airspace./只有救援acft行动可进入空域
62.hibbing taconite telephone 218
‑
262
‑
5940is in charge of on scene emerg response act./现场紧急反应行动电话
63.minneapolis/zmp/artcc telephone 651
‑
463
‑
5580is the faa cdn facility./联邦航空局cdn电话
64.日期:2001031630
‑
2001031730
65.在美国和许多其它国家,所有上述信息都可以以数字格式获得。在美国,此类访问可以是免费的。上述信息的数据格式可以是标准化的、公开的和相当紧凑的。与给定日期有关的所有上述美国数据可以纳入16gb。
66.faa正在将国家空域系统(nas)转换为基于性能的导航(pbn),其主要使用全球导航卫星系统(gnss)形式的卫星导航。gps(全球定位系统)是gnss的系统之一,是用于全球导航和测量的系统。gps系统可利用地理纬度线和经度线,来为人的位置或名胜古迹提供坐标。纬度线是横跨地球从东向西延伸的水平线。纬度线中最长和最主要的线称为赤道。赤道以0
°
纬度表示。经度线是从北极延伸到南极的垂直线。经度的主线称为本初子午线。本初子午线以0
°
经度表示。地球上的大多数位置并不沿着纬度或经度线,而是位于由水平线和垂直线的交点形成的形状之内。
67.为了准确地将人定位在地球表面上,纬度线和经度线被进一步划分,并以三种常见格式中的至少一种来表示:度、分、秒(dms)。表示gps坐标的常用方式可以是一组纬度(n/s)和经度(e/w)的格式。北n(orth)/南s(outh)可被放在每个dms的末端,以表示它是在赤道的北面还是南面。东e(ast)/西w(est)可被放在每个dms的末端,以表示它是在本初子午线的左侧还是本初子午线的右侧。每个纬度或经度线之间的间隔(代表1
°
)被划分为60分钟,并且每分钟被划分为60秒。gps坐标的示例可如下所示:(25
°
24’10.1
″
n,20
°
15’16.5
″
e)。
68.如上所述,使用为载人飞行器设计的传统手段来解释空域是困难的,并且需要一定量的训练。虽然faa越来越多地为非专业人员提供设计的简化图(如图400)、应用程序和其它工具,但是此类工具仍然难以操作,并且可能更重要的是,要求uav飞行员在驾驶他/她的uav之前来实际咨询他们。最近与管制空域中uav相关的许多事件已经清楚地表明,并非所有的uav飞行员都这样做。
69.此外,特别是对于相对小型的uav,未经训练(或者甚至经过训练)的uav飞行员可能难以测量出他/她的uav正在飞行的高度。例如,在此之前,对于uav飞行员来说,很难知道他/她的小型uav的高度是90英尺(如uav图所示在某些区域可能是合法的)或110英尺(这可能是非法的)。可能需要在uav(例如,uav(201))或控制器(例如,控制器(202))中构建技术系统,以帮助解决此类问题。
70.参考图5
‑
6,在本技术的实施例中,可以提供一种系统。该系统可包括uav(501)和控制器(502),其一起构成uas(500)。uav(501)和控制器(502)可包括关于图1
‑
2所示的uas(100)和uas(200)所述的任何数量的硬件(例如,摄像机和通信接口)和软件部件,并且可被配置为执行关于uas(100)和uas(200)所述的功能。根据本技术实施例,参考图5,uav(501)可包括计算机设备(520),该计算机设备包括至少一个处理器和存储计算机代码的存储器,其中计算机代码被配置为在由uav(501)的至少一个处理器执行时,使得uav(501)执行其功能。计算机设备(520)可由计算机设备(900)中任何数量的部件来实施,稍后将参考图10进行描述,但是不考虑图10中所图示的大部分用户界面部件。计算机设备(520)可以是嵌入式系统,并且有利地(出于空间和重量的原因),作为uav(501)的机载飞行控制电路的一部分或集成到其中。计算机设备(520)可具有获取其在三维空间中的位置的机制。例如,计算机设备(520)可包括gps天线(523),其连同gps接收器一起,可以作为此类机制的一个示例。计算机设备(520)可包括其它机制,例如gps与(可能更准确的)气压高度传感器的组合,从基于地面的导航工具(全向范围导航系统(vor)、蜂窝电话塔等)确定横向位置的三角测量机制等。uav(501)还包括可由uav(501)的用户(509)访问的存储器(524)。例如,如图5所图示,存储器(524)可以是微型sd卡。然而,存储器(524)也可以是另一种可变半导体存储器,uav(501)中的机载nv
‑
ram,可通过网络插头从计算机或无线lan等访问到它。
71.控制器(502)还包括计算机设备,该计算机设备包括至少一个处理器和存储计算机代码的存储器,其中计算机代码被配置为在由控制器(502)的至少一个处理器执行时,使得控制器(502)执行其功能。控制器(502)的计算机设备可由计算机设备(900)中任何数量的部件来实施,稍后将参照图10进行描述。参考图6,控制器(502)包括可由控制器(502)的用户(509)访问的存储器(534)。存储器(534)可具有与存储器(524)相同或相似的配置。根据本技术实施例,uas(500)包括存储器(524)和存储器(534)中的一者、两者或不包括两者。
72.存储器(524)和/或存储器(534)的大小足以存储与uav可在其中操作的至少一个
空域有关的信息。此类信息包括图、notam、tfr等的数字表示。该数字信息可由uav(501)的计算机设备(520)和/或控制器(502)的计算机设备解释,并且可以在三维(包括横向位置和高度)上与uav(501)的位置进行比较(例如,相关)。作为比较(例如,相关)过程的结果,uav(501)的计算机设备(520)和/或控制器(502)的计算机设备,可以确定uav(501)在uav(501)当前占据的空域中“合法飞行”或“不合法飞行”。可选地或另外地,uav(501)的计算机设备(520)和/或控制器(502)的计算机设备可以确定其它结果,诸如“合法飞行但接近合法空域边界”、“合法飞行但如果不更改航向则在10秒内将是非法的”等。存储器(524)和/或存储器(534)可以加载有与uav(501)预期飞行进入的至少一个空域有关的数字信息。
73.在uav(501)飞行之前或期间,uas(500)可通过来自无线连接(541)和无线连接(542)中的至少一者来获取与至少一个空域有关的数字信息(或附加数字信息)。例如,参考图5,uas(500)的uav(501)可被配置为具有通过诸如网络(507)(例如,5g网络)等无线网络到因特网(505)的无线连接(541),并且uss(504)可具有到因特网(505)的连接。可选地或另外地,参考图6,uas的控制器(502)可被配置为具有通过无线网络(诸如网络(507),例如,5g网络)到因特网(505)的无线连接(542),并且uss(504)可具有到因特网(505)的连接。因此,uas(500)的uav(501)和/或控制器(502)可被配置为经由因特网(505)与uss(504)和/或其它系统通信。经由无线连接(541)和/或无线连接(542),uas(500)可从uss(504)或其它系统接收与至少一个空域有关的数字信息(或附加数字信息)。
74.例如,根据本技术实施例,无人机(501)和/或控制器(502)可以向uss(408)(和/或类似的服务器)查询如下信息,然后,无人机(501)和/或控制器(502)获取到信息后存储在存储器(524)和/或存储器(534)中:
75.(a)图:若uav(501)或控制器(502)确定出存储器(524)和/或存储器(534)中相关区域的机载图不是当前的(例如,航空图中携带截止日期);uas(500)可以查询并且获得与uas(500)识别出的特定区域相关的图。例如,特定区域可以是uas(500)通过gps天线(523)获得的地理位置(例如,uas(500)的位置),或者其他地理参考数据,包括uav(501)周围合理的半径,这个合理的半径可以由uav(501)或者控制器(502)根据uav(501)的耐力(例如,最大飞行时间)、uav(501)的最大速度、容纳风的安全因子以及其他环境因子计算得到。
76.(b)notam:uas(500)可以查询并且获得与uas(500)识别出的特定区域相关的notam,该特定区域可以和上述特定区域相同或者相似。
77.(c)tfr:uas(500)可以查询并且获得与uas(500)识别出的特定区域相关的tfr,该特定区域可以和上述特定区域相同或者相似。
78.(d)其他信息:uas(500)可以查询并且获得和uav的飞行相关的其他信息(例如,与uas(500)识别出的特定区域相关)。例如,其他信息包括天气数据,例如包括风的数据。根据本技术实施例,uas(500)可以使用天气数据确定安全因子,来计算uav(501)当前位置周围的合理半径。
79.使用上述机制接收到的信息可以和机载信息集成在存储器(524)和/或存储器(534)中,并且按照如下所述的方式进行使用。
80.用于在uas(500)(例如,uav(501)或者控制器(502))和uss(504),或者其他的服务器,之间通信的协议的细节,依赖于uss(504)或者其他的服务器所提供的服务。从历史上,作为示例,在涉及空中交通管制中心的地理区域(美国几个州的大小)的文件中可以找到
notam(例如tfr)。根据本技术实施例,uas(500)(例如,uav(501)或者控制器(502))可以(a)请求与uav(501)正在操作的状态(例如,由uas(500)根据gps位置和机载图识别出的)相对应的文件,(b)使用协议,例如ftp或者http,下载相关的文本notam文件,(c)解析该文件得到相关信息,(d)将识别出的相关信息和机载图信息集成在存储器(524)和/或存储器(534)中。这种处理,在飞行之前至少发生一次,但是,在飞行过程中也可以发生好几次,例如,以1分钟或者5分钟为间隔。由于相对小的文件大小,这种处理是实用的。如下所述的本技术的其他接入机制,将会更加有效。
81.最近,包括faa在内的空域当局已经实施了现代的查询界面,允许自动下载和特定位置相关的信息,颗粒度比州还要精细。这些界面是基于表述性状态转移(rest)操作。rest技术可以使得客户端使用预定格式,通过标准http方法(包括,例如,get、post、put、patch或者delete),查询由基本的统一资源标识符(uri)标识的服务器。这种预定的标准格式,有一个是所知的java对象标识法(json)。
82.根据本技术实施例,参照图7a
‑
b,uas(500)(例如,uav(501)或者控制器(502))可以向faa设计的uss服务器(例如uss 504),提供关于uav图的rest请求,并且,作为响应,接收服务器的json已编码响应(602)。例如,如图7b所示,json已编码响应(602)可以指示信息,例如“上限”(603),单位为英尺(604)。“上限”(603)可以是uav(501)的最大允许高度。json已编码响应(602)还可以指示如下信息,例如,uav图的有效日期(605)以及uav图的最近编辑日期(606)(由此,uas(500)可以得到uav图的截止日期),以及上限(603)所应用的空域的位置(607)和形状(608)。
83.uas(500)查询notam(例如tfr)和/或其他实时更新信息的格式相似。
84.由于查询消息和回复的大小都相对比较小(如图7a
‑
b中的示例所示),并且和解析大小为几千字节的文本文件相比,处理这些消息的计算需求相对比较低,因此,相比于全文件下载和解析,这样的查询机制更加适合于uav。根据所建议的规则,uav需要通知uss有关它的任何位置,因此,也就大概没有了对隐私的考虑。
85.参考图5,uav(501)的计算机设备(520)可包括通信接口,该通信接口包括例如至少一个通信器,诸如通信器(525),其可包括例如5g天线。通信器(525)可被配置为通过使用网络(507)向因特网(505)发送数据,并从其接收数据(例如,与至少一个空域有关的信息)。通信器(525)或uav(501)的通信接口的另一通信器可被配置为,经由无线连接(510)向控制器(502)发送数据(例如,传感器数据、视频数据、与至少一个空域有关的信息),并从其接收数据(例如,命令数据)。控制器(502)还可具有与通信器的通信接口,该通信器被配置为,经由无线连接(510)向uav(501)发送数据(例如,命令),并从其接收数据(例如,传感器数据、视频数据、与至少一个空域有关的信息)。参考图6,控制器(502)的通信器(515)或控制器(502)的通信接口的另一通信器,可被配置为通过使用网络(507)向因特网(505)发送数据,并从其接收数据(例如,与至少一个空域有关的信息)。本技术的每个通信器包括例如,发送器和接收器。
86.根据本技术实施例,uas(500)可被配置为接收与至少一个空域有关的数字信息。根据本技术实施例,uas(500)可被配置为在uav(501)与控制器(502)之间通信与至少一个空域有关的数字信息。根据本技术实施例,uav(501)和/或控制器(502)可被配置为,基于与至少一个空域有关的数字信息作出决定(例如,非法飞行)。根据本技术实施例,uav(501)
和/或控制器(502)可被配置为,使得uav(501)和/或控制器(502)警告用户(509)有关决定,和/或使得uav(501)基于决定执行动作(例如,自动返回或着陆)。
87.再回到图5
‑
6,根据本技术上述的任何机制或其他任何合适的机制,在已经获取到存储在存储器(524)和/或存储器(534)中图信息的更新信息之后,uas(500)将根据更新后的图信息进行比较(例如相关)的处理结果发送给用户(509)。当用户(509)驾驶uav(501)时,对获取到的细节不太感兴趣。相反,用户(509)对事件的指示最感兴趣,这些事件包括uav(501)的飞行非法或者已经非法。
88.根据本技术实施例,参考图5,uas(500)可以使用uav(501)和控制器(502)之间的无线连接(510),发送对比较(例如相关)结果进行编辑的信号,来通知用户(509),并且通过例如控制器(502)的振动,将视觉信号通知给用户(509),该视觉信号例如为警告或者在显示(512)上显示的消息,显示(512)可以是控制器(502)的一部分或者附着于控制器(502)。假定,如所建议的faa规则所要求的的,无线连接(510)是存在的。但是,如果由于任何原因,这样的无线连接不存在,替代地或者附加地,uav(501)可以包括允许将比较(例如相关)过程结果通知给用户(509)的机载机制。例如,uav(501)包括地面视觉警告灯。作为另一个示例,uav(501)可以“快速点头”(快速振荡垂直运动)。
89.参考图6,本技术实施例可以包括替代的或附加的实施方式,将一部分计算负担从uav(501)转移到控制器(502)。例如,在这种情况下,控制器(502)可以访问包括图数据(可能已更新)的存储器(534),并且根据由uav(501)经由无线连接(510)发送的位置信息(由gps天线(523)获取),执行上述比较(例如相关)过程。可以使用上述的任何一种合适的机制,对图数据进行更新,通过通信器(515)(例如5g接口)、网络(507)(例如5g网络)、因特网(505),到达uss(504)。比较的结果(例如合法飞行或者非法飞行)在控制器(502)的本地是可用的,并且由控制器(502)发送给用户(509),例如通过视觉信号(例如,通过灯)、在显示(512)上显示的消息、振动提示,或者其他合适的机制。由于控制器(502)控制uav(501),也可以由uav(501)自身对结果可见,例如通过附着于uav(501)的灯,或者通过uav(501)“快速点头”。由于用户(509)将精力集中在uav(501)本身而不是控制器(502)的用户界面上,因此,由uav(501)指示确定结果是有益的。
90.如上所述,可以实施rest操作来重新获取notam/tfr数据。rest操作返回的数据可以是标准格式,例如json。
91.在近tfr区域,并不是所有返回的数据对于uav(501)进行操作是重要的。如图8a
‑
b所示,表(700)中列出的参数,可以指示对于uas(500)有用的数字信息,uas(500)可以经由本技术实施例所述的数据通信机制来获取。
92.参考图8a
‑
b,术语“强制的”是指有条件地强制。即,如果相关信息可用,则必须包括该信息。但如果不可用,则不包括在内。表(700)中的“强制的”和”可选的”的指定,符合本技术的一个非限制性示例实施例,并且本技术的实施例可包括针对每种信息类型的各种指定。例如,表(700)中指定为“强制的”的任意个属性可被指定为”可选的”,并且表(700)中指定为”可选的”的任意个属性可被指定为“强制的”。在表(700)中列出的信息的数据类型、单元和精度也是非限制性示例,并且参数也可以以其它数据类型提供,并具有不同的单元和精度。
93.参考表(700),由uas(500)获取的notam(例如tfr)信息包括例如“位置”、“半径”、
“
上限ceiling”、“日期时间”、“下限floor”、“免除”、“上限和下限几何环”等属性。
[0094]“位置”可以是描述notam(例如tfr)区域的gps位置的信息,并且可被设置为“强制的”。“位置”可以是uav(501)识别notam(例如tfr)区域的有用参数。“半径”可以是描述notam(例如tfr)区域的半径的信息,可被设置为“强制的”。“上限”可以是描述notam(例如tfr)区域的上限的信息,并且可被设置为“强制的”。“日期时间”可以是描述notam(例如tfr)有效日期的信息,可被设置为“强制的”。“日期时间”对于uav(501)是一个有用的参数,可以识别出notam(例如tfr)的限制时间。“下限”可以是描述notam(例如tfr)区域的下限的信息,并且可被设置为“强制的”。“免除”是指指示uav(501)是否从notam(例如tfr)中免除的信息(例如布尔信息)。例如,在notam(例如tfr)区域中多次执行特殊的操作,例如,针对特殊任务,需要装有摄像机的无人机抓拍灾难场景的识破,例如,野火。“免除”参数使得uas(500)向用户(509)指示uav(501)在这类区域飞行是否是合法的。真(t)表示uav(501)飞行穿过tfr是合法的,假(f)表示uav(501)飞行穿过tfr是非法的。“上限和下限几何环”可以是notam(例如tfr)区域的每个上限和下限环的几何数据,并且可被设置为”可选的”。
[0095]
属性“半径”、“上限”、“下限”和“上限和下限几何环”可以各自使用字典数据类型。使用字典数据类型的所有参数,可以为同一目的采用键值。例如,对于notam(例如tfr)区域的“半径”,如果仅定义了一个半径,则{key,value}数据对可以是{“0”:半径}。然后,{“0”:上限}可以表示与键值“0”相关联的半径的上限。还可以为“下限”和“上限和下限几何环”数据提供类似的关系。
[0096]
根据一些实施例,几何属性(例如,“上限和下限几何环”)可被设置为”可选的”,并且可以单独使用“半径”来表示notam(例如tfr)的覆盖。
[0097]
当notam(例如tfr)区域没有规则的环边界,或者具有相关联的多个环边界时,对于“半径”、“上限”和“下限”中的每一个参数,可以使用字典数据类型。根据一些实施例,可以使用下面的几何json格式来表示每个边界:
[0098]
[0099][0100]
以上所示的键“0”和“1”各自表示相应的环边界的键值,其也指向“半径”、“上限”和“下限”的信息中的相同键。如上所示,键“0”和“1”中的每一个,可与dms格式的gps坐标的相应阵列相关联,gps坐标指示环边界的信息。
[0101]
uas(500)可以从uss/utm获取上述航空信息,相应地采用适当的操作。
[0102]
uas(500)可以从uss/utm(例如uss 504)获取上述航空信息(如表(700)所示的信息),并且以下列方式中的至少一种使用该信息:
[0103]
(1)在启动期间,uas(500)可以查询服务器,例如与uss(504)合作的服务器、laanc服务器或类似的服务器,以与其自身已知的位置进行比较(例如,相关),以及飞行是否合法(以及在其当前位置周围的预期视觉范围内合法飞行的高度是多少)。视觉范围可通过试探法来确定,例如,涉及uav的大小——一英尺长的无人机在几百英尺之外几乎不可见。如果在当前位置飞行是非法的,uas(500)可将此类情况通知给飞行员。uas(500)还可通知飞行
员合法飞行的最大高度(这在多环环境中是特别相关的)。uas(500)还可帮助飞行员获取飞行的laanc授权。
[0104]
(2)在飞行中,uas(500)可将由uav(501)的机载gps获取的位置信息进行相关。如果uas(500)确定uav(501)已经进入非法空域,则它可以采取纠正动作,例如通知飞行员、自动返回和/或自动着陆。
[0105]
本技术的uas包括至少一个处理器和存储计算机代码的存储器。当由至少一个处理器执行时,计算机代码可被配置为使得至少一个处理器执行本技术实施例的功能。
[0106]
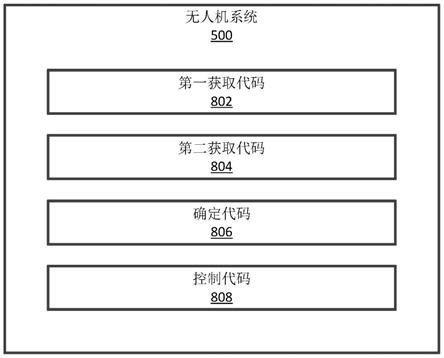
例如,参考图9,本技术的uas(500)包括至少一个处理器和存储计算机代码的存储器。可在uav(501)和控制器(502)中的一者或两者中,提供任意数量的至少一个处理器和存储器,使得本技术的功能可由uav(501)和控制器(502)中的单个、或者由uav(501)和控制器(502)二者来执行,或者在uav(501)与控制器(502)之间进行划分。计算机代码包括第一获取代码(802)、第二获取代码(804)、确定代码(806)和控制代码(808)。
[0107]
第一获取代码(802)可被配置为使得至少一个处理器获取第一数字信息,用于指示无人机系统uas(500)中无人机uav(501)的位置。根据本技术实施例,第一数字信息经由gps获取。
[0108]
第二获取代码(804)可被配置为使得至少一个处理器获取第二数字信息,用于识别飞行员通告notam的区域(例如tfr区域)。
[0109]
根据本技术实施例,第二数字信息的至少一部分可以是基于javascript语言的轻量级的数据交换(json)格式。
[0110]
根据本技术实施例,第二数字信息的至少一部分可具有字典数据类型。
[0111]
根据本技术实施例,可经由无线连接,连接到uas(500)之外的网络,从服务器获取第二数字信息。
[0112]
根据本技术实施例,参考图8a
‑
b所图示的表(700)所述的数字信息,第二数字信息包括至少一个参数,用于指示如下信息中的至少一个:所述区域的位置坐标、所述区域的半径、所述notam的有效日期、所述区域的上限、所述区域的下限,以及将所述无人机从所述notam的禁令中免除的状态。
[0113]
根据本技术实施例,uas(500)可根据所获取的第二数字信息,更新存储在存储器中的信息(例如航空图),并且更新的信息可被用于确定代码(806)的确定操作中。
[0114]
确定代码(806)可被配置为使得至少一个处理器基于第一数字信息和第二数字信息,将无人机uav(501)的位置与notam区域进行比较(例如,相关),确定uav(501)是否发生空域侵犯。
[0115]
在来自uav(501)和控制器(502)中的一个,经由uas(500)之外的网络获取第一数字信息和/或第二数字信息,并且来自uav(501)和控制器(502)中的另一个被配置为执行确定结果的情况下,来自uav(501)和控制器(502)中的一个,可经由来自uav(501)和控制器(502)之间的无线连接(510),将第一数字信息和/或第二数字信息通信到另一方,使得来自uav(501)和控制器(502)中的另一方可执行确定结果。
[0116]
根据本技术实施例,由无人机uav(501)经由第一无线连接,连接到无人机系统uas(500)之外的网络,获取第二数字信息;其中,由无人机uav(501)的至少一个处理器来执行确定是否发生空域侵犯的步骤。
[0117]
根据本技术实施例,由无人机系统uas(500)的控制器(502)经由第一无线连接,连接到无人机系统uas(500)之外的网络,来获取第二数字信息;其中,控制器(502)包括至少一个处理器,用于经由连接到无人机uav(501)的第二无线连接,控制无人机uav(501);由无人机系统uas(500)的控制器(502)的至少一个处理器来执行确定是否发生空域侵犯的步骤。
[0118]
根据本技术实施例,无人机系统uas(500)包括无人机uav(501)和控制器(502),控制器(502)用于经由第一无线连接控制无人机uav(501),无人机uav(501)和控制器(502)均包括至少一个处理器;
[0119]
获取第二数字信息包括:由无人机uav(501)和控制器(502)中的一个,经由第二无线连接,连接到无人机系统uas(500)之外的网络,来获取第二数字信息;其中,由无人机uav(501)和控制器(502)中的另一个的至少一个处理器来执行确定是否发生空域侵犯的步骤。
[0120]
控制代码(808)可被配置为使得至少一个处理器基于确定代码(807)确定的结果,控制无人机系统uas(500)警告无人机系统uas(500)的用户(509)已发生空域侵犯或可能发生空域侵犯,或控制无人机uav(501)自动返回或着陆。
[0121]
例如,根据本技术实施例,控制器(502)可通过例如由控制器(502)的触觉反馈设备(例如,电动机或致动器)使得控制器(502)振动,或者经由控制器(502)的警示灯的视觉信号或通过在控制器(502)的显示器(例如,显示器(512))上显示的消息,通知用户(509)比较的结果(例如,空间侵犯的发生或可能发生)。
[0122]
可选地或另外地,uav(501)可包括机载机制,允许其通知用户(509)比较(例如,相关)过程的结果。例如,uav(501)的至少一个处理器可控制uav(501)的地面视觉警示灯发出信号以通知结果。
[0123]
作为另一示例,uav(501)的至少一个处理器可控制uav(501)“摆动”(快速振荡垂直运动)。
[0124]
根据本技术实施例,当来自uav(501)和控制器(502)中的一个在本地执行比较(例如,相关)过程时,来自uav(501)和控制器(502)中的一个还可向用户(509)发信号通知比较的结果(例如,空域侵犯的发生或可能发生)。
[0125]
可选地或另外地,来自uav(501)和控制器(502)中的一个可经由无线连接(510)将已编码的比较结果的信号,发送给uav(501)和控制器(502)中的另一个,并且uav(501)和控制器(502)中的另一个的至少一个处理器可控制其向用户(509)发信号通知比较的结果。
[0126]
如上所述,本技术的实施例可以在控制器和uav两者中实施为计算机软件,使用并且物理地存储在至少一个计算机可读介质中的计算机可读指令。例如,图10示出了适于实施所公开的主题的某些实施例的计算机设备(900)。
[0127]
可以使用任何合适的机器代码或计算机语言对计算机软件进行编码,可以对机器代码或计算机语言进行汇编、编译、链接等机制以创建包括指令的代码,指令可由计算机中央处理单元(cpu)、图形处理单元(gpu)等直接执行,或者通过解释、微代码执行等执行。
[0128]
指令可在各种类型的计算机或其部件上执行,包括例如个人计算机、平板计算机、服务器、智能电话、游戏设备、物联网设备等。
[0129]
图10所示的用于计算机设备(900)的部件本质上是示例性的,并不旨在对实施本技术实施例的计算机软件的使用范围或功能提出任何限制。部件的配置也不应被解释为具
有与计算机设备(900)的示例性实施例中所示部件中的任一个或其组合有关的任何依赖性或要求。
[0130]
计算机设备(900)可以包括某些人机界面输入设备。这种人机界面输入设备可以通过触觉输入(如:键盘输入、滑动、数据手套移动)、音频输入(如:声音、掌声)、视觉输入(如:手势)、嗅觉输入(未示出),对至少一个人类用户的输入做出响应。所述人机界面设备还可用于捕获某些媒体,气与人类有意识的输入不必直接相关,如音频(例如:语音、音乐、环境声音)、图像(例如:扫描图像、从静止影像相机获得的摄影图像)、视频(例如二维视频、包括立体视频的三维视频)。
[0131]
输入人机接口设备可包括以下中的至少一个(仅示出每样一个):键盘(901)、鼠标(902)、触控板(903)、触摸屏(910)、操纵杆(905)、麦克风(906)、扫描仪(907)和摄像机(908)。
[0132]
计算机设备(900)还包括某些人机接口输出设备。此类人机接口输出设备可通过例如触觉输出、声音、光和嗅觉/味觉刺激至少一个人类用户的感觉。此类人机接口输出设备可包括触觉输出设备(例如通过触摸屏(910)、数据手套或操纵杆(905)的触觉反馈),但也可存在不用作输入设备的触觉反馈设备。例如,此类设备可以是音频输出设备(诸如:扬声器(909)、耳机(未示出))、视觉输出设备(诸如包括crt屏幕、lcd屏幕、等离子屏幕、oled屏幕的屏幕910,每个屏幕具有或不具有触摸屏输入能力,每个屏幕具有或不具有触觉反馈能力,其中的一些能够通过诸如立体输出等方式输出二维视觉输出或多于三维输出;虚拟现实眼镜(未示出)、全息显示器和烟缸(未示出))及打印机(未示出)。
[0133]
计算机设备(900)还可以包括人可访问的存储设备及其相关介质,如包括具有cd/dvd的高密度只读/可重写式光盘(cd/dvd rom/rw)(920)或类似介质(921)的光学介质、拇指驱动器(922)、可移动硬盘驱动器或固体状态驱动器(923),诸如磁带和软盘(未示出)的传统磁介质,诸如安全软件保护器(未示出)等的基于rom/asic/pld的专用设备,等等。
[0134]
本领域技术人员还应当理解,结合所公开的主题使用的术语“计算机可读介质”不包括传输介质、载波或其它瞬时信号。
[0135]
计算机设备(900)还可以包括通往至少一个通信网络的接口。例如,网络可以是无线的、有线的、光学的。网络还可为局域网、广域网、城域网、车载网络和工业网络、实时网络、延迟容忍网络等等。网络还包括因特网、无线局域网、蜂窝网络(gsm、3g、4g、5g、lte等)等局域网、电视有线或无线广域数字网络(包括有线电视、卫星电视、和地面广播电视)、车载和工业网络(包括canbus)等等。某些网络通常需要外部网络接口适配器,用于连接到某些通用数据端口或外围总线(949)(例如,计算机设备(900)的usb端口);其它系统通常通过连接到如下所述的系统总线集成到计算机设备(900)的核心(例如,因特网接口集成到pc计算机设备或蜂窝网络接口集成到智能电话计算机设备)。通过使用这些网络中的任何一个,计算机设备(900)可以与其它实体进行通信。所述通信可以是单向的,仅用于接收(例如,无线电视),单向的仅用于发送(例如can总线到某些can总线设备),或双向的,例如通过局域或广域数字网络到其它计算机设备。上述的每个网络和网络接口可使用某些协议和协议栈。此类通信可包括到云计算环境(955)的通信。如上所述,可以在这些网络和网络接口的每一者上使用某些协议和协议栈。
[0136]
上述人机接口设备、人类可访问的存储设备和网络接口(954)可以连接到计算机
设备(900)的核心(940)。
[0137]
核心(940)可包括至少一个中央处理单元(cpu)(941)、图形处理单元(gpu)(942)、以现场可编程门阵列(fpga)(943)形式的专用可编程处理单元、用于特定任务的硬件加速器(944)等。这些设备以及只读存储器(rom)(945)、随机存取存储器(946)、内部大容量存储器(例如内部非用户可存取硬盘驱动器、固态硬盘等)(947)等可通过系统总线(948)进行连接。在某些计算机设备中,可以以至少一个物理插头的形式访问系统总线(948),以便可通过额外的中央处理单元、图形处理单元等进行扩展。外围装置可直接附接到核心的系统总线(948),或通过外围总线(949)进行连接。外围总线的体系结构包括外部控制器接口pci、通用串行总线usb等。图形适配器(950)可被包括在核心(940)中。
[0138]
cpu(941)、gpu(942)、fpga(943)和加速器(944)可以执行某些指令,这些指令组合起来可以构成上述计算机代码。该计算机代码可以存储在rom(945)或ram(946)中。过渡数据也可以存储在ram(946)中,而永久数据可以存储在例如内部大容量存储器(947)中。通过使用高速缓冲存储器可实现对任何存储器设备的快速存储和检索,高速缓冲存储器可与至少一个cpu(941)、gpu(942)、大容量存储器(947)、rom(945)、ram(946)等紧密关联。
[0139]
所述计算机可读介质上可具有计算机代码,用于执行各种计算机实现的操作。介质和计算机代码可以是为本技术的目的而特别设计和构造的,也可以是计算机软件领域的技术人员所熟知和可用的介质和代码。
[0140]
作为实施例而非限制,具有体系结构(900)的计算机设备,特别是核心(940),可以作为处理器(包括cpu、gpu、fpga、加速器等)提供执行包含在至少一个有形的计算机可读介质中的软件的功能。这种计算机可读介质可以是与上述的用户可访问的大容量存储器相关联的介质,以及具有非易失性的核心(940)的特定存储器,例如核心内部大容量存储器(947)或rom(945)。实现本技术的各种实施例的软件可以存储在这种设备中并且由核心(940)执行。根据特定需要,计算机可读介质可包括一个或一个以上存储设备或芯片。该软件可以使得核心(940)特别是其中的处理器(包括cpu、gpu、fpga等)执行本技术所述的特定过程或特定过程的特定部分,包括定义存储在ram(946)中的数据结构以及根据软件定义的过程来修改这种数据结构。另外或作为替代,计算机设备可以提供逻辑硬连线或以其它方式包含在电路(例如,加速器(944))中的功能,该电路可以代替软件或与软件一起运行以执行本技术所述的特定过程或特定过程的特定部分。在适当的情况下,对软件的引用可以包括逻辑,反之亦然。在适当的情况下,对计算机可读介质的引用可包括存储执行软件的电路(如集成电路(ic)),包含执行逻辑的电路,或两者兼备。本技术包括任何合适的硬件和软件组合。
[0141]
虽然本技术已对多个示例性实施例进行了描述,但实施例的各种变更、排列和各种等同替换均属于本技术的范围内。因此应理解,本领域技术人员能够设计多种系统和方法,所述系统和方法虽然未在本技术中明确示出或描述,但其体现了本技术的原则,因此属于本技术的精神和范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

