1.本发明属于扫地机器人技术领域,具体地说,是涉及一种扫地机器人控制方法及扫地机器人。
背景技术:
2.现有的扫地机器人通常按照随机清扫、陀螺仪导航、视觉导航和激光雷达导航等四类方式进行清扫。
3.其中,视觉导航可以基于摄像头获取图像进行识别来判断墙体的位置,激光雷达导航也可以通过激光雷达识别墙体,进而,能够基于识别出的墙体执行清扫控制。譬如,基于识别出的墙体实现弓字形路线清扫,提高扫地机器人的清扫效率和清扫路线的美观性。
4.但是,不管是按照视觉导航还是激光雷达导航来识别墙体,均需为扫地机器人配置专用控制芯片,利用控制芯片实现墙体识别,从而导致基于识别出的墙体才能执行的清扫控制实现方式复杂,成本较高。
技术实现要素:
5.本发明的目的在于提供一种扫地机器人控制方法及扫地机器人,无需专门配置控制芯片即可识别墙体,解决了基于墙体识别执行的清扫控制方式复杂、成本高的技术问题。
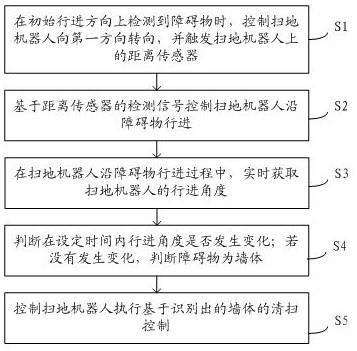
6.为解决上述技术问题,本发明采用以下技术方案予以实现:提出一种扫地机器人控制方法,包括:在初始行进方向上检测到障碍物时,控制所述扫地机器人向第一方向转向,并触发所述扫地机器人上的距离传感器;所述距离传感器安装于所述扫地机器人的侧部;基于所述距离传感器的检测信号控制所述扫地机器人沿所述障碍物行进;在所述扫地机器人沿所述障碍物行进过程中,实时获取所述扫地机器人的行进角度,若在设定时间内所述行进角度未发生变化,识别出所述障碍物为墙体;控制所述扫地机器人执行基于识别出的所述墙体的清扫控制。
7.进一步的,控制所述扫地机器人执行基于识别出的所述墙体的清扫控制,具体包括:控制所述扫地机器人再次向所述第一方向转向;控制所述扫地机器人直行,并在检测到障碍物后,控制所述扫地机器人向第二方向转向;所述第二方向与所述第一方向反向;控制所述扫地机器人直行设定距离后,控制所述扫地机器人再次向所述第二方向转向并直行;在检测到障碍物后,控制所述扫地机器人向所述第一方向转向并直行所述设定距离后,再次向所述第一方向转向;重复上述步骤直至清扫结束。
8.进一步的,所述方法还包括:若在所述设定时间内所述扫地机器人的行进角度发生变化,识别出所述障碍物为非墙体,控制所述扫地机器人继续行进,在行进过程中,仍实时获取所述扫地机器人的行进角度,并判断所述设定时间内所述行进角度是否发生变化。
9.进一步的,所述方法还包括:在控制所述扫地机器人继续行进期间,若再次检测到障碍物,控制所述扫地机器人向所述第一方向转向,以使所述距离传感器再次被触发。
10.提出一种扫地机器人,包括:行进角度检测单元,用于获取所述扫地机器人行进期
间的行进角度;障碍物检测单元,安装于所述扫地机器人前端,用于在所述扫地机器人的行进方向上检测到障碍物时产生障碍物检测信号;还包括:距离传感器,安装于所述扫地机器人的侧部;距离传感器触发单元,用于在所述扫地机器人在初始行进方向上行进时,若接收到所述障碍物信号时,控制所述扫地机器人向第一方向转向,并触发所述距离传感器;行进控制单元,用于基于所述距离传感器的检测信号控制所述扫地机器人沿所述障碍物行进;墙体识别单元,用于基于所述行进角度检测单元输出的行进角度,判断在设定时间内所述扫地机器人的行进角度是否发生变化,并在所述设定时间内所述行进角度未发生变化时,识别出所述障碍物为墙体;清扫控制单元,用于控制所述扫地机器人执行基于识别出的所述墙体的清扫控制。
11.进一步的,所述清扫控制单元,具体用于:控制所述扫地机器人再次向所述第一方向转向之后,控制所述扫地机器人直行,并在检测到障碍物后,控制所述扫地机器人向第二方向转向;控制所述扫地机器人直行设定距离后,控制所述扫地机器人再次向所述第二方向转向并直行;在检测到障碍物后,控制所述扫地机器人向所述第一方向转向并直行所述设定距离后,再次向所述第一方向转向;重复上述步骤直至清扫结束;其中,所述第二方向与所述第一方向反向。
12.进一步的,所述扫地机器人还包括:非墙体识别单元,用于若在所述设定时间内所述扫地机器人的行进角度发生变化时,识别出所述障碍物为非墙体,控制所述扫地机器人继续行进,在行进过程中,仍实时获取所述扫地机器人的行进角度,并判断所述行进角度是否发生变化。
13.进一步的,所述非墙体识别单元,还用于:在识别出所述障碍物为非墙体,控制所述扫地机器人继续行进期间,若再次检测到障碍物,控制所述扫地机器人向所述第一方向转向,以使所述距离传感器再次被触发。
14.与现有技术相比,本发明的优点和积极效果是:本发明提出的扫地机器人控制方法及扫地机器人中,在扫地机器人的初始行进方向上检测到障碍物时,首先控制扫地机器人向第一方向转向,触发设置在扫地机器人侧部上的距离传感器;然后,根据距离传感器的检测信号控制扫地机器人沿障碍物行进,行进期间获取扫地机器人的行进角度信息,若在设定时间内扫地机器人的行进角度均未发生变化,表明障碍物满足墙体特性,识别出该障碍物是墙体,进而能够执行基于识别出的墙体的清扫控制。在本发明中的墙体识别过程中,障碍物检测和行进角度检测可以利用扫地机器人的现有结构方便实现,再结合距离传感器的检测结果及相应的控制方法即可实现墙体识别,无需额外配置专用控制芯片,实现方式简单,成本低,有效解决了基于墙体识别执行的清扫控制方式复杂、成本高的技术问题。
15.结合附图阅读本发明实施方式的详细描述后,本发明的其他特点和优点将变得更加清楚。
附图说明
16.图1为本发明提出的扫地机器人控制方法的一个实施例的流程图;图2为本发明提出的扫地机器人控制实施例示意图之一;图3为本发明提出的扫地机器人控制实施例示意图之二;图4为本发明提出的扫地机器人控制实施例示意图之三;
图5为本发明提出的扫地机器人控制实施例示意图之四;图6为本发明提出的扫地机器人控制实施例示意图之五;图7为本发明提出的扫地机器人控制方法的又一个实施例的流程图;图8为本发明提出的扫地机器人控制方法的再一个实施例的流程图;图9为本发明基于墙体识别的清扫控制的一个实施例的流程图;图10为本发明提出的扫地机器人的一个实施例的功能架构图。
具体实施方式
17.下面结合附图对本发明的具体实施方式作进一步详细的说明。
18.本发明提出的扫地机器人控制方法,旨在在不增加额外控制芯片的情况下,实现扫地机器人的墙体识别功能,以使得扫地机器人能够执行基于识别出的墙体的清扫控制,譬如,基于识别出的墙体执行弓字形路线清扫控制。具体的,如图1,本发明提出的扫地机器人控制方法的一个实施例,包括如下步骤:步骤s1:在初始行进方向上检测到障碍物时,控制扫地机器人向第一方向转向,并触发扫地机器人上的距离传感器。
19.本发明实施例中的扫地机器人,在前端安装有诸如红外传感器、碰撞传感器等的障碍物检测单元器,用于检测行进过程中是否存在障碍物,并在检测到障碍物时产生障碍物检测信号;其侧部(左侧或者右侧)安装有距离传感器,用于基于其检测信号可以控制扫地机器人距离障碍物按照设定距离行进;在扫地机器人的机体内部还设置有诸如陀螺仪、加速度计等的进行角度检测单元,用于检测扫地机器人行进过程中的行进角度。
20.扫地机器人启动初期,按照一个初始行进方向运行,该初始行进方向可以为随机方向,也可以为一个设定的方向,例如其前端垂直于墙体的方向;如图2所示,初始行进方向标记为1,在初始行进方向上若存在障碍物a,或者为桌子、立式空调等的屋内设施,或者为墙体,则扫地机器人前端的障碍物检测单元被触发,产生障碍物检测信号,扫地机器人在接收到该障碍物检测信号之后,控制自身向第一方向转向,该第一方向为相对扫地机器人自体转动的方向,为左边或者右边。
21.图2以第一方向为左边为例,扫地机器人在转向左边之后,其右侧部安装的距离传感器检测到信号而被触发。
22.当第一方向为右向时,距离传感器安装于扫地机器人的左侧部机身,当第一方向为左向时,距离传感器安装于扫地机器人的右侧机身;也即,若以扫地机器人的中心为原点建立坐标系,则障碍物检测单元和距离传感器按照相互垂直的探测方向安装,且在扫地机器人未向第一方向转向时,该距离传感器的探测方向与所述第一方向恰好反向。
23.步骤s2:基于距离传感器的检测信号控制扫地机器人沿障碍物行进。
24.距离传感器被触发后,扫地机器人基于其检测信号控制自身与障碍物保持设定距离行进,也即,开始沿着障碍物行进。
25.步骤s3:在扫地机器人沿障碍物行进过程中,实时获取扫地机器人的行进角度。
26.在扫地机器人沿障碍物行进过程中,行进角度检测单元实时检测扫地机器人的行进角度; 该障碍物若为墙体,扫地机器人相对障碍物直行,其行进角度不会发生变化。若该障碍物为非墙体,扫地机器人相对障碍物行进过程中,其行进角度会发生变化。
27.步骤s4:判断在设定时间内行进角度是否发生变化;若未发生变化判断障碍物为墙体。
28.本发明的一些实施例中,为排除非墙体障碍物的情形,限定一个设定时间t,例如2秒,若在该设定时间内,扫地机器人的行进角度均未发生变化,则判断障碍物为墙体,执行步骤s5。
29.步骤s5:控制扫地机器人执行基于识别出的墙体的清扫控制。
30.通过上述步骤,本发明在未配置控制芯片的情况下,利用扫地机器人的现有结构,结合距离传感器的检测结果及相应的控制方法即可实现对墙体的识别,实现方式简单且成本低,解决了基于墙体识别执行的清扫控制方式复杂、成本高的技术问题。
31.在本发明的一些实施例中,若障碍物不是墙,例如是个椅子,则扫地机器人沿障碍物绕行,如图4所示,绕行期间,其行进角度在设定时间内发生了变化,则判断障碍物为非墙体,如图7所示,执行步骤s6:控制扫地机器人继续行进。
32.行进期间实时获取扫地机器人的行进角度,并返回步骤s4:判断设定时间内行进角度是否发生变化;当其绕障碍物行进结束之后,或者再次沿墙行进,或者在检测不到其他障碍物后随机行进;若再次沿墙行进,如图4所示,直至满足在设定时间内行进角度未发生变化的条件后,判断其识别到了墙体,执行步骤s5,控制扫地机器人执行基于识别出的墙体的清扫控制。
33.在本发明的一些实施例中,若在控制扫地机器人继续行进期间,再次检测到了障碍物,如图8所示,执行步骤s7:控制扫地机器人向第一方向转向,以使距离传感器再次触发,并从步骤s2开始执行后续的控制,直至识别出墙体。
34.在本发明的一些实施例中,基于墙体识别执行的清扫控制如图9所示,包括如下控制:步骤s21:控制扫地机器人再次向第一方向转向。
35.扫地机器人识别到墙体后,控制自身再次向第一方向转向,接着上述实施例,以向左为第一方向,此时,扫地机器人已经垂直于墙体,如图3所示。
36.步骤s22:控制扫地机器人直行,并在检测到障碍物后,控制扫地机器人向第二方向转向。
37.这里的第二方向与第一方向反向,在第一方向为左边转向时,第二方向为右边转向,反之亦然。
38.如图5所示,扫地机器人垂直于墙体后,控制其直行,当障碍物检测单元再次检测到障碍物时,控制扫地机器人向第二方向,也即右向转向,如图5所示。
39.再次检测到的障碍物,或者为对面墙体,或者为其他障碍物,多数情况下为对面墙体,即使为其他障碍物,也不影响本实施例中扫地机器人执行弓字形清扫,该点将在如图6所示的实施例中进行说明。
40.步骤s23:控制扫地机器人直行设定距离后,控制扫地机器人再次向第二方向转向并直行。
41.如图5所示,当扫地机器人右向转向之后,控制其直行设定距离d,也即沿对墙或者其他障碍物行进设定距离d,该设定距离d以弓字形清扫所需覆盖面积和清洁程度决定,可以是1/2机身距离,1个机身距离等。
42.直行设定距离d后,再次右向转向,此时,扫地机器人垂直于对面墙体,实现了半个弓字形的清扫周期。
43.右向转向后控制其继续直行。
44.步骤s24:在检测到障碍物后,控制扫地机器人向第一方向转向并直行设定距离后,再次向第一方向转向。
45.如图5所示,再次直行后,当再次检测到障碍物时,或为墙体或为其他障碍物,控制扫地机器人左向转向并直行设定距离d后再次左向转向;此时,完成了一个完整弓字形清扫周期。
46.接下来,重复步骤s21至步骤s24,直至清扫结束。
47.需要说明的是,在寻墙结束,执行弓字形清扫期间,即使检测到的障碍物并非墙体,如图6所示,在做弓字形路线期间,当检测到障碍物为其他障碍物时,根据步骤s21至s24,其会将障碍物默认为墙体实施弓字形清扫。
48.基于上述提出的扫地机器人控制方法,本发明还提出一种扫地机器人,如图10所示,该扫地机器人包括行进角度检测单元1、障碍物检测单元2、距离传感器3、距离传感器触发单元4、行进控制单元5、墙体识别单元6和清扫控制单元7。
49.行进角度检测单元1用于获取扫地机器人行进期间的行进角度,例如陀螺仪、加速度传感器等;障碍物检测单元2安装于扫地机器人前端,用于在扫地机器人的行进方向上检测到障碍物时产生障碍物检测信号,例如红外传感器、激光雷达、摄像头等;距离传感器3安装于扫地机器人的侧部。
50.距离传感器触发单元4用于在扫地机器人在初始行进方向上行进时,若接收到障碍物信号时,控制扫地机器人向第一方向转向,并触发距离传感器3;行进控制单元5用于基于距离传感器3的检测信号控制扫地机器人沿障碍物行进;墙体识别单元6用于基于行进角度检测1单元输出的行进角度,判断在设定时间内扫地机器人的行进角度是否发生变化,并在设定时间内行进角度未发生变化时,识别出障碍物为墙体;清扫控制单元7用于控制扫地机器人执行基于识别出的墙体的清扫控制。
51.在本发明的一些具体实施例中,清扫控制单元7具体用于:制扫地机器人再次向第一方向转向之后,控制扫地机器人直行,并在检测到障碍物后,控制扫地机器人向第二方向转向;控制扫地机器人直行设定距离后,控制扫地机器人再次向第二方向转向并直行;在检测到障碍物后,控制扫地机器人向第一方向转向并直行设定距离后,再次向第一方向转向;重复上述步骤直至清扫结束;其中,第二方向与第一方向反向。
52.在本发明的一些实施例中,扫地机器人还包括非墙体识别单元8,用于若在设定时间内扫地机器人的行进角度发生变化时,识别出障碍物为非墙体,控制扫地机器人继续行进,在行进过程中,仍实时获取扫地机器人的行进角度,并判断行进角度是否发生变化。
53.在本发明的一些实施例中,非墙体识别单元8还用于:在识别出障碍物为非墙体,控制扫地机器人继续行进期间,若再次检测到障碍物,控制扫地机器人向第一方向转向,以使距离传感器再次被触发。
54.该扫地机器人识别墙体的控制方式以及识别出墙体之后的弓字形清扫控制方式,已经在其控制方法中详述,此处不予赘述。
55.应该指出的是,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,
本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

