1.本发明涉及农业自动化领域,具体说是一种玉米联合收获机偏差检测传感装置及自动对行方法。
背景技术:
2.随着我国玉米收获机械化的逐步实现,提高玉米收获的质量和效率已成为国内高校和科研院所研究的热点问题。玉米收获过程特点为时间紧、任务重、工作环境恶劣,驾驶员长时间驾驶玉米收获机进行作业,很容易感到疲劳。除此之外,在夜间能见度降低的情况下作业,也会降低玉米收获的质量和效率。国外农机公司已推出搭载自动对行传感器的自动对行系统,国内也有一些学者开展了应用于玉米收获机上的自动对行系统的研究工作,并取得了一些成果,但总体技术还不完善。
3.为了降低玉米收获的劳动强度,实现智能收获,针对玉米收获过程中对行困难的问题,提出一种能够实时检测玉米收获机相对于玉米行间横向偏差的偏差检测传感装置,并设计了自动对行系统与控制方法。
技术实现要素:
4.玉米收获机的收获质量与效率受到对行质量的影响,需要实时调整玉米收获机的前进方向以保证对行质量。目前我国对于玉米联合收获机自动对行系统的研究较为缺少,采用的传感器多为相机或组装的机械式传感器,存在环境适应性不强和易于损坏等问题。
5.为达到以上目的,本发明采取的技术方案是:
6.针对上述问题,本发明设计了一种基于玉米联合收获机的自动对行系统,包括:偏差检测传感装置10、控制器30、收获机状态检测传感器20和转向执行机构40;
7.所述偏差检测传感装置10与收获机状态检测传感器20分别与控制器30连接,所述控制器30与转向执行机构40连接;
8.所述偏差检测传感装置10用于检测玉米联合收获机相对于待收获玉米行的横向偏差值e并通过can总线发送给控制器30,所述控制器30根据获得的横向偏差值e计算航向偏角ψ;
9.所述收获机状态检测传感器20用于检测玉米联合收获机行驶状态数据并发送给控制器30,所述控制器30根据获得的玉米联合收获机行驶状态数据与航向偏角ψ进行期望转向轮转角θ的计算;
10.所述转向执行机构40用于根据控制器30计算得到的期望转向轮转角θ控制转向轮转动;
11.所述偏差检测传感装置10包括左对行传感器和右对行传感器;
12.所述左对行传感器和右对行传感器相对安装于同一割道两侧的分禾器底部,所述控制器30安装在驾驶室内副驾驶座下,所述转向执行机构40设置在驾驶室下方;
13.所述左对行传感器和右对行传感器用于在玉米联合收获机偏离时与玉米行接触,
检测两者间的横向偏差,并将横向偏差值e通过can总线发送至控制器30。
14.所述收获机状态检测传感器20包括:车速传感器201、后轮转角传感器202、转向比例阀芯位置传感器203和方向盘位置传感器204;
15.所述车速传感器201安装于玉米收获机前轮的轴上,用于采集玉米联合收获机的行驶速度;
16.所述后轮转角传感器202通过四边形连杆结构与车轮相连,用于采集玉米联合收获机后轮转角角度;
17.所述转向比例阀芯位置传感器203设置在驾驶室下方,用于获取阀芯位置;
18.所述方向盘位置传感器204安装于方向盘内部转轴上,用于获取玉米联合收获机方向盘转角数据;
19.所述偏差检测传感装置10包括:传感器外壳101、信号采集板102、内壳端盖103、弹簧挡板104、复位弹簧105、弹簧座106、内壳107、磁钢108、滚动轴承109、轴用挡圈110、旋转轴111和触碰杆112;
20.所述触碰杆112固定于旋转轴111头部,旋转轴111的底部穿过滚动轴承109和轴用挡圈110后与弹簧座106连接,复位弹簧105的端部搭在弹簧座106上,弹簧挡板104的左端穿过复位弹簧105,所述弹簧挡板104的右端与内壳端盖103连接,磁钢108安装于旋转轴111的底部,用于为信号采集板102提供磁场,信号采集板102固定在内壳端盖103上,滚动轴承109一端与内壳107上设有的凸台接触,另一端通过轴用挡圈110限制滚动轴承109的轴向运动;
21.在上述方案的基础上,所述触碰杆112垂直于割台中心线并通过螺栓固定于旋转轴111头部,所述旋转轴111与弹簧座106通过内六角螺钉连接,信号采集板102通过铜柱固定在内壳端盖103上。
22.在上述方案的基础上,所述信号采集板包括:电源模块、信号预处理模块、霍尔芯片、微控制器和can收发模块;
23.所述电源模块分别与信号预处理模块、霍尔芯片、微控制器和can收发模块连接,用于为信号预处理模块、霍尔芯片、微控制器和can收发模块供电;
24.所述霍尔芯片与信号预处理模块连接,所述信号预处理模块与微控制器连接,所述微控制器与can收发模块连接;
25.所述磁钢108用于为霍尔芯片提供磁场,所述霍尔芯片用于检测磁场变化,当检测到磁场变化时,霍尔芯片用于将磁场变化转换为模拟电压发送至信号预处理模块,信号预处理模块用于对模拟电压进行分压、稳压和滤波得到的模拟电压值输出至微控制器,微控制器用于将模拟电压值转换为横向偏差值e,通过can收发模块将横向偏差值e发送至can总线,所述控制器30通过can总线接收横向偏差信息。
26.在上述方案的基础上,所述转向执行机构40包括转向开关阀401、转向比例电磁阀402、转向液压缸403;转向开关阀401用于控制转向液压缸403液压油的供给;转向比例电磁阀402根据控制器30计算得到的期望转向轮转角θ通过控制液压油供给流量的大小控制车轮转动速度。
27.一种基于玉米联合收获机的自动对行方法应用上述系统,具体包括如下步骤:
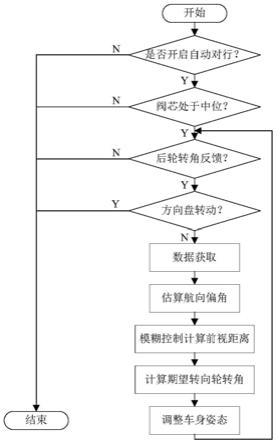
28.步骤1:启动玉米联合收获机,确认是否开启自动对行系统,若开启,玉米联合收获机进入自动对行模式并进入步骤2,若不开启,进入步骤10;
29.步骤2:通过转向比例阀芯位置传感器203获取阀芯位置,若处于中心位置,进入步骤3,若不处于中心位置,进入步骤10;
30.步骤3:读取后轮转角传感器202的后轮转角角度,若读取到后轮转角角度数值时,进入步骤4,若无法读取角度数值进入步骤10;
31.步骤4:读取方向盘位置传感器204数据,判断方向盘转向角度是否发生转动,当没有发生转动时,进入步骤5,若发生转动进入步骤10;
32.步骤5:读取偏差检测传感器10、车速传感器201、后轮转角传感器202数据,得到玉米联合收获机的横向偏差值e、实际车速v和后轮转角θ,然后进入步骤6;
33.步骤6:控制器30通过航向偏角估算公式计算航向偏角ψ,然后进入步骤7;
34.步骤7:根据步骤6计算得到的航向偏角ψ及横向偏差值e,通过模糊控制模型计算前视距离d,然后进入步骤8;
35.步骤8:根据步骤6计算得到的航向偏角ψ及横向偏差值e,根据步骤7计算得到的前视距离d,计算期望转向轮转角θ;
36.步骤9:根据步骤8得到的期望转向轮转角θ,控制器30通过pid算法计算控制电压,向转向比例电磁阀发送电压形式的控制信号,进而驱动车轮偏转,实现一次车身姿态的调整,然后返回步骤3;
37.步骤10:关闭玉米联合收获机的自动对行系统。
38.在上述方案的基础上,步骤6所述的通过航向偏角估算公式计算航向偏角ψ,具体包括如下步骤:
39.通过在时间间隔δt内读取两次连续偏差检测传感器数据判断玉米收获机车身位姿状态,并通过公式(1)计算航向偏角ψ。
[0040][0041]
式中,e1为第一次读取的横向偏差值;e2为第二次读取的横向偏差值;δt表示时间间隔;v表示车速;
[0042]
在上述方案的基础上,步骤7所述的模糊控制模型的输入变量为横向偏差值e与航向偏角,根据模糊控制模型的控制规则得到输出变量,所述输出变量为前视距离。
[0043]
在上述方案的基础上,所述横向偏差值论域的范围是[
‑
25,25],横向偏差值的模糊集合为{ll,lm,ls,z,rs,rm,rl},其中ll代表横向偏差左侧大,lm代表左侧偏差中,ls代表左侧偏差小,z代表横向偏差为零,rs代表右侧偏差小,rm代表右侧偏差中,rl代表右侧偏差大;
[0044]
其中,ll为高斯隶属度函数,参数为[2,
‑
25],lm为三角形隶属度函数,参数为[
‑
25,
‑
17,
‑
7],ls为三角形隶属度函数,参数为[
‑
16,
‑
8,
‑
3],z为三角形隶属度函数,参数为[
‑
5,0,5],rs为三角形隶属度函数,参数为[3,7,16],rm为三角形隶属度函数,参数为[8,17,25],rl为高斯隶属度函数,参数为[
‑
2,25]。
[0045]
在上述方案的基础上,所述航向偏角ψ论域的范围是[
‑
10,10],航向偏角的模糊集合为{nl,nm,ns,zo,ps,pm,pl},其中nl代表左侧航向角大,nm代表左侧航向角中,ns代表左侧航向角小,zo代表航向偏角为0,ps代表右侧航向角小,pm代表右侧航向角中,pl代表右侧航向角大;
[0046]
其中,nl为高斯隶属度函数,参数为[
‑
0.6,
‑
10],nm为三角形隶属度函数,参数为[
‑
10,
‑
7,
‑
3],ns为三角形隶属度函数,参数为[
‑
7,
‑
3,
‑
1],zo为三角形隶属度函数,参数为[
‑
2,0,2],ps为三角形隶属度函数,参数为[1,3,7],pm为三角形隶属度函数,参数为[3,7,10],pl为高斯隶属度函数,参数为[0.6,10]。
[0047]
在上述方案的基础上,所述控制规则包括:
[0048]
当横向偏差值属于ll,航向偏角属于nl,nm,ns,zo,ps,pm,pl时,前视距离均属于vc;
[0049]
当横向偏差值属于lm,航向偏角属于nl时,前视距离属于c;,
[0050]
当横向偏差值属于lm,航向偏角属于nm时,前视距离属于rc;
[0051]
当横向偏差值属于lm,航向偏角属于ns时,前视距离属于m;
[0052]
当横向偏差值属于lm,航向偏角属于zo时,前视距离属于rf;
[0053]
当横向偏差值属于lm,航向偏角属于ps时,前视距离属于m;
[0054]
当横向偏差值属于lm,航向偏角属于pm时,前视距离属于rc;
[0055]
当横向偏差值属于lm,航向偏角属于pl时,前视距离属于c;
[0056]
当横向偏差值属于ls,航向偏角属于nl时,前视距离属于c;,
[0057]
当横向偏差值属于ls,航向偏角属于nm时,前视距离属于m;
[0058]
当横向偏差值属于ls,航向偏角属于ns时,前视距离属于rf;
[0059]
当横向偏差值属于ls,航向偏角属于zo时,前视距离属于vf;
[0060]
当横向偏差值属于ls,航向偏角属于ps时,前视距离属于rf;
[0061]
当横向偏差值属于ls,航向偏角属于pm时,前视距离属于m;
[0062]
当横向偏差值属于ls,航向偏角属于pl时,前视距离属于c;
[0063]
当横向偏差值属于z,航向偏角属于nl时,前视距离属于vc;,
[0064]
当横向偏差值属于z,航向偏角属于nm时,前视距离属于rc;
[0065]
当横向偏差值属于z,航向偏角属于ns时,前视距离属于rf;
[0066]
当横向偏差值属于z,航向偏角属于zo时,前视距离属于vf;
[0067]
当横向偏差值属于z,航向偏角属于ps时,前视距离属于rf;
[0068]
当横向偏差值属于z,航向偏角属于pm时,前视距离属于rc;
[0069]
当横向偏差值属于z,航向偏角属于pl时,前视距离属于vc;
[0070]
当横向偏差值属于rs,航向偏角属于nl时,前视距离属于c;,
[0071]
当横向偏差值属于rs,航向偏角属于nm时,前视距离属于m;
[0072]
当横向偏差值属于rs,航向偏角属于ns时,前视距离属于rf;
[0073]
当横向偏差值属于rs,航向偏角属于zo时,前视距离属于vf;
[0074]
当横向偏差值属于rs,航向偏角属于ps时,前视距离属于rf;
[0075]
当横向偏差值属于rs,航向偏角属于pm时,前视距离属于m;
[0076]
当横向偏差值属于rs,航向偏角属于pl时,前视距离属于rc;
[0077]
当横向偏差值属于rm,航向偏角属于nl时,前视距离属于c;,
[0078]
当横向偏差值属于rm,航向偏角属于nm时,前视距离属于m;
[0079]
当横向偏差值属于rm,航向偏角属于ns时,前视距离属于m;
[0080]
当横向偏差值属于rm,航向偏角属于zo时,前视距离属于rf;
[0081]
当横向偏差值属于rm,航向偏角属于ps时,前视距离属于m;
[0082]
当横向偏差值属于rm,航向偏角属于pm时,前视距离属于rc;
[0083]
当横向偏差值属于rm,航向偏角属于pl时,前视距离属于c;
[0084]
当横向偏差值属于rb,航向偏角属于nl,nm,ns,zo,ps,pm,pl时,前视距离均属于vc。
[0085]
在上述方案的基础上,所述前视距离论域的范围是[2,8],前视距离的模糊集合为{vc,c,rc,m,rf,f,vf},其中vc代表很近,c代表近,rc代表较近,m代表适中,rf代表较远,f代表远,vf代表很远。
[0086]
其中,vc为高斯隶属度函数,参数为[0.1,2],c为三角形隶属度函数,参数为[2,3,3.6],rc为三角形隶属度函数,参数为[3.2,3.9,4.6],m为三角形隶属度函数,参数为[3.9,5,6.1],rf为三角形隶属度函数,参数为[5.4,6.1,6.8],f为三角形隶属度函数,参数为[6.4,7.2,8],vf为高斯隶属度函数,参数为[0.1,8]。
[0087]
在上述方案的基础上,步骤8所述的期望转向轮转角θ通过公式(2)计算得到:
[0088][0089]
式中,l表示玉米联合收获机轴距;e表示横向偏差;d表示前视距离;θ表示期望转向轮转角,本发明涉及的玉米联合收获机的转向轮为后轮。
[0090]
在工作过程中,控制器通过读取各传感器数据,并实时估算玉米收获机航向偏角ψ,通过模糊控制计算前视距离d,然后计算期望后轮转向角θ,最后输出控制信号控制转向执行机构调整后轮偏转角度,实现车身姿态调整,进而实现自动对行。
[0091]
本发明具有以下优点:
[0092]
(1)本发明的偏差检测传感装置可以实时准确地检测玉米联合收获机相对于玉米行之间的偏差,相对于应用相机检测的方法,该装置对天气和复杂环境的适应性更好。
[0093]
(2)本发明的装置可以适用于后轮转向的各种类型的玉米联合收获机,加工成本低,易于安装。
[0094]
(3)本发明提出的自动对行系统可以利用偏差检测传感装置进行航向角计算,在降低成本的前提下进行航向角的准确计算,通过模糊控制调节前视距离,使得该自动对行系统可以模仿人类驾驶员习惯进行转向控制。
[0095]
(4)本发明提出的自动对行控制策略在保证安全作业的前提下,可以实现玉米联合收获机的自动对行功能,保证了自动对行系统的准确性与可靠性。
[0096]
(5)本发明提出的自动对行系统减轻了驾驶员的劳动强度,达到提高玉米收获效率和质量的目的。
附图说明
[0097]
本发明有如下附图:
[0098]
图1为偏差检测传感装置结构图;
[0099]
图2为偏差检测传感转置信号采集板硬件电路方案图;
[0100]
图3为自动对行系统组成示意图;
[0101]
图4为自动对行系统组成部件安装位置示意图;
[0102]
图5为自动对行系统控制流程图。
[0103]
图6为玉米联合收获机位姿示意图一
[0104]
图7为玉米联合收获机位姿示意图二
[0105]
图8为横向偏差的隶属度函数和取值范围示意图
[0106]
图9为航向偏角的隶属度函数和取值范围示意图
[0107]
图10为前视距离的隶属度函数和取值范围示意图
[0108]
附图标记:
[0109]
101、传感器外壳;102、信号采集板;103、内壳端盖;104、弹簧挡板;105、复位弹簧;106、弹簧座;107、内壳;108、磁钢;109、滚动轴承;110、轴用挡圈;111、旋转轴;112、触碰杆;10、偏差检测传感装置;20、收获机状态检测传感器;30、控制器;40、转向执行机构;201、车速传感器;202、后轮转角传感器;203、转向比例阀芯位置传感器;204、方向盘位置传感器;401、转向开关阀;402、转向比例电磁阀;403、转向液压缸。
具体实施方式
[0110]
以下结合附图1~10对本发明作进一步详细说明。
[0111]
本发明为适用于玉米联合收获机的偏差检测传感装置与自动对行系统。本系统具有横向偏差检测与车身姿态调整功能,能够实现玉米收获过程中的自动对行功能。
[0112]
触碰杆110用于在玉米收获机偏离时与玉米秆接触,从而带动旋转轴109转动一定角度,磁钢108安装于旋转轴底部,为安装于信号采集板102上的霍尔芯片提供磁场。霍尔芯片检测到磁场变化,转换为模拟电压经过信号预处理信号进行分压、稳压和滤波后输出至微控制器,微控制器将模拟电压值转换为横向偏差值e,通过can收发模块将横向偏差值e发送至can总线,当触碰杆110与玉米秆分离时,在复位弹簧105的驱动下回到初始位置,该装置可减小杂草干扰并提高传感装置检测精度。
[0113]
触碰杆110通过螺栓固定于旋转轴109头部,旋转轴109与弹簧座106通过内六角螺钉,复位弹簧105的端子搭在弹簧座106上,弹簧挡板104穿过复位弹簧105,磁钢108安装于旋转轴底部,信号采集板102通过铜柱固定在内壳端盖上。
[0114]
适用于玉米联合收获机的自动对行系统由偏差检测传感装置10、收获机状态检测传感器20、控制器30和转向执行机构40组成。
[0115]
控制器30安装在副驾驶座下;偏差检测传感装置10相对安装于同一割道两侧的分禾器底部,触碰杆垂直于割台中心线;车速传感器201安装于玉米收获机前轮的轴上,通过控制器30的脉冲信号输入口向控制器30传输数据;后轮转角传感器202通过四边形连杆结构与后轮相连,并通过控制器30的模拟量信号输入口向控制器30传输数据;方向盘位置传感器204安装于方向盘内部转轴上;转向开关阀401、转向比例电磁阀402、转向液压缸403、转向比例阀芯位置传感器203为一整体,设置在驾驶室下方,转向开关阀401控制液压缸供给液压油,来控制车轮转动,比例电磁阀通过控制液压油供给流量大小来控制车轮转动的速度,其中,转向比例阀芯位置传感器203通过控制器30的模拟量信号输入口向控制器30传输数据。
[0116]
本发明的工作过程:
[0117]
在玉米收获机作业过程中,启动自动对行系统,玉米联合收获机进入自动对行模
式。首先,通过转向比例阀芯位置传感器203获取阀芯位置,当阀芯处于中位时,读取后轮转角传感器202的后轮转角角度,然后,读取方向盘位置传感器204数据,连续三次方向盘转向角度没有变化时,读取偏差检测传感器10、车速传感器201、后轮转角传感器202数据,通过公式(1)计算航向偏角。
[0118]
如图6所示,将玉米联合收获机位姿分为9种状态,由图知a,b,c三种状态的航向偏角均为0,横向偏差分别为负值、0、和正值;d,e,f三种状态的航向偏角均为负值,横向偏差分别为负值、0、和正值;g,h,i三种状态的航向偏角均为正值,横向偏差分别为负值、0、和正值。b状态时横向偏差和航向偏角都为0,为正常收获状态,不需要进行调整;a,c两种状态时,对行传感器的触碰机构触碰到玉米秸秆,控制策略控制车轮转向,调整后会分别转化成i和d状态;e,h两种状态时,对行传感器的触碰机构未触碰到玉米秸秆,下一时刻会分别转化成d和i状态;g,f两种状态时,对行传感器的触碰机构触碰到玉米秸秆,控制策略控制车轮转向,调整后会分别转化成i和d状态。
[0119]
综上所述可将9种状态转化为图7的3种:
[0120]
以状态d为例,通过在时间间隔δt内读取两次连续偏差检测传感器数据判断玉米收获机车身位姿状态,并通过公式计算航向偏角ψ。
[0121][0122]
式中,e1为第一次读取的横向偏差值;e2为第二次读取的横向偏差值;δt表示时间间隔;v表示车速;
[0123]
得到航向偏角ψ后,通过建立玉米收获机二轮车运动学模型计算所需转向轮转角,模拟驾驶员驾驶习惯,通过模糊控制模型计算前视距离。
[0124]
模糊控制模型输入变量为横向偏差与航向偏角,输出变量为前视距离。
[0125]
其中,横向偏差值论域的范围是[
‑
25,25],所述横向偏差值的模糊集合为{ll,lm,ls,z,rs,rm,rl},其中ll代表横向偏差左侧大(负大),lm代表左侧偏差中(负中),ls代表左侧偏差小(负小),z代表横向偏差为零(无横向偏差),rs代表右侧偏差小(正小),rm代表右侧偏差中(正中),rl代表右侧偏差大(正大);
[0126]
在横向偏差中,ll为高斯隶属度函数,参数为[2,
‑
25],lm为三角形隶属度函数,参数为[
‑
25,
‑
17,
‑
7],ls为三角形隶属度函数,参数为[
‑
16,
‑
8,
‑
3],z为三角形隶属度函数,参数为[
‑
5,0,5],rs为三角形隶属度函数,参数为[3,7,16],rm为三角形隶属度函数,参数为[8,17,25],rl为高斯隶属度函数,参数为[
‑
2,25]。
[0127]
航向偏角论域的范围是[
‑
10,10],航向偏角的模糊集合为{nl,nm,ns,zo,ps,pm,pl}其中nl代表左侧航向角大(负大),nm代表左侧航向角中(负中),ns代表左侧航向角小(负小),zo代表航向偏角为0,ps代表右侧航向角小(正小),pm代表右侧航向角中(正中),pl代表右侧航向角大(正大);
[0128]
在航向偏角中,nl为高斯隶属度函数,参数为[
‑
0.6,
‑
10],nm为三角形隶属度函数,参数为[
‑
10,
‑
7,
‑
3],ns为三角形隶属度函数,参数为[
‑
7,
‑
3,
‑
1],zo为三角形隶属度函数,参数为[
‑
2,0,2],ps为三角形隶属度函数,参数为[1,3,7],pm为三角形隶属度函数,参数为[3,7,10],pl为高斯隶属度函数,参数为[0.6,10]。
[0129]
前视距离论域的范围是[2,8],前视距离的模糊集合为{vc,c,rc,m,rf,f,vf},其
中vc代表很近,c代表近,rc代表较近,m代表适中,rf代表较远,f代表远,vf代表很远。
[0130]
在前视距离中,vc为高斯隶属度函数,参数为[0.1,2],c为三角形隶属度函数,参数为[2,3,3.6],rc为三角形隶属度函数,参数为[3.2,3.9,4.6],m为三角形隶属度函数,参数为[3.9,5,6.1],rf为三角形隶属度函数,参数为[5.4,6.1,6.8],f为三角形隶属度函数,参数为[6.4,7.2,8],vf为高斯隶属度函数,参数为[0.1,8]。
[0131]
共制定49条控制规则,如表1所示。
[0132]
表1.前视距离模糊控制规则
[0133][0134]
所述的期望转向轮转角θ通过如下公式计算得到:
[0135][0136]
式中,l表示玉米联合收获机轴距;e表示横向偏差;d表示前视距离;θ表示期望转向轮转角。
[0137]
控制器30计算出所需期望转向轮转角θ后,通过pid算法计算控制电压,向比例电磁阀发送电压形式的控制信号,进而驱动车轮偏转,实现一次车身姿态的调整。
[0138]
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

