本实用新型涉及雾化技术领域,具体涉及一种自动雾化系统。
背景技术:
室内空气消毒与净化的方法主要通过自然通风换气法、层流洁净、循环风空气消毒机净化法和化学消毒剂消毒法。
其中,化学消毒剂雾化消毒具有较好的消毒效果,可广泛应用于学校、医疗、交通、餐饮、商业等公共场所领域及畜牧养殖领域。
目前,雾化消毒在室内环境的应用主要是通过人工喷洒、消毒设备喷洒和室内专用管道喷洒。
人工喷洒方式劳动强度大,喷洒精度及效率不能保证;消毒设备喷洒智能程度不高,大多需要人工监管及操作,喷洒消毒效果受操作者影响。
专用管道喷洒虽然效率高,但是需要对室内环境改造,成本高,而且受管道安装布局影响,消毒效果不均。
随着智能机器人行业的不断发展,智能机器人的应用范围越来越广,解决家居不同方面问题的机器人逐渐出现。
现有技术中也有用于喷洒消毒水的雾化机器人,例如,公开号为201820163805.1的专利申请公开了一种多功能雾化消毒机器人,包括底座、上壳、顶罩、控制模块及与控制模块分别电连接的驱动模块、采集模块、调整模块、雾化组件、喇叭;控制模块固定在底座及顶罩内;喇叭固定在底座内;驱动模块固定在底座的下发;采集模块固定在底座的四周;调整模块固定在底座的前端、后端及顶罩内;顶罩固定在上壳的顶部;上壳与底座可拆卸固定相连。
采用该技术方案后,采集模块能过对预消毒的空间进行静态建模后规划行程,调整模块采集机器人的实时运动轨迹,根据动态环境的变化及时调整规划路线,达到均匀喷洒的目的,
但是,这种雾化机器人在内部液体不足的情况下,只能通过人工的方式进行补液,从而造成补液的麻烦,导致雾化过程的效率下降,因此,还有待进一步改进,以提高雾化过程的自动化程度。
技术实现要素:
为了解决上述技术问题,本实用新型的目的在于提供一种自动雾化系统,其包括移动机器人以及固定基站,通过在固定基站内设置液体补液部以及电源充电部,在移动机器人缺液和/或缺电的情况下,可移动至固定基站进行补液和/或补电,有利于保持移动机器人内的液体以及驱动其移动的动力充足,减少需要人工补液的麻烦,有利于提高雾化过程的自动化程度。
为实现上述实用新型目的,本实用新型采取的技术方案如下:
一种自动雾化系统,包括移动机器人,所述移动机器人包括底座、行走组件以及雾化组件,自动雾化系统还包括固定基站,所述固定基站内设置有液体补料部以及电源充电部,所述移动机器人上设置蓄电池以及储液腔,所述蓄电池与所述行走组件连接并为其供电,所述储液腔与所述雾化组件连接并为其提供雾化液体,所述储液腔还连接有补液管,所述补液管与所述液体补料部对接,所述蓄电池还连接有充电接头,所述充电接头与所述电源充电部对接,所述移动机器人还设置有第一定位部,所述固定基站内还对应第一定位部设置有第二定位部。
通过这样设置,移动机器人在缺液和/或蓄电池电源不足的情况下,可移动至固定基站内,通过设置第一定位部与第二定位部,使移动机器人能移动至固定基站内进行姿态定位,使补液管与液体补料部对接,充电接头与电源充电部对接,从而液体补料部可向储液腔进行液体补充,电源充电部可向蓄电池充电,从而对移动机器人进行液体和/或电源的补充,从而减少需要人工的干预,提高雾化过程的自动化程度。
作为优选,所述移动机器人包括与所述底座固定的外罩,所述补液管的开口朝上设置且位于所述外罩的顶部,所述液体补料部包括与固定基站固定连接的补液接头,所述移动机器人移动至所述固定基站内后,所述补液接头位于所述补液管的开口的正上方。
通过这样设置,将补液管以开口朝上的状态设置于外罩的顶部,当移动机器人移动至固定基站内,与固定基站固定的补液接头位于补液管的开口正上方,便于向补液管补液。
作为优选,所述补液管为伸缩管。
通过这样设置,将补液管设置为伸缩管,可调整补液管端部的高度,以便将补液管与补液接头的相对位置进行调整,使补液过程稳定、可靠。
作为优选,所述补液管的开口设置为喇叭状。
通过这样设置,在补液接头向补液管输送液体时,喇叭状的开口有利于减少液体飞溅,从而降低液体的浪费,并减少因液体飞溅造成的清理麻烦。
作为优选,所述底座内设置有升降驱动件,所述升降驱动件与所述补液管固定,并驱动所述补液管沿竖直方向升降。
通过这样设置,升降驱动件可驱动补液管升降,从而可在补液前使补液管与补液接头进行对接,从而进一步减少液体飞溅的可能,将补液管与补液接头对接后,还可加大补液接头向补液管输送液体的流量,有利于缩短补液时间、提高补液效率。
作为优选,所述底座上还设置有雾化腔以及扩散腔,所述扩散腔内设置有扩散组件,所述雾化腔开设有与所述移动机器人外部连通的雾化出气口,所述雾化腔的上部与所述扩散腔连通,所述雾化组件设置于所述雾化腔内,所述雾化腔内还设置抽液泵,所述抽液泵的进液端连接有进液管,所述进液管延伸至所述储液腔内的液面之下,所述抽液泵的出液端位于所述雾化腔内。
通过这样设置,将雾化腔与储液腔分开,通过抽液泵将待雾化的液体由储料腔向雾化腔输送,从而在雾化组件停止工作后,因雾化腔与储液腔独立,有利于减少液体在雾化腔内过多残留,并降低停机后储料腔内液体受污染的可能;设置扩散腔,并使雾化腔的上部与扩散腔连通,通过设置于扩散腔内的扩散组件将雾化后的气体向移动机器人外部扩散。
作为优选,所述雾化组件包括雾化器,所述雾化器与所述蓄电池电性连接,所述雾化器固定于所述雾化腔的底部,所述雾化腔的内壁上还设置有第一液位检测元件。
通过这样设置,蓄电池为雾化器提供工作电源,雾化腔内设置第一液位检测元件,当液位检测元件检测到雾化腔内的液位过低,即雾化腔内的液位无法没过雾化器的雾化片时,启动抽液泵,向雾化腔内补液,补液及时,有利于减少因雾化腔过低而导致雾化器损坏的情况发生。
作为优选,所述储液腔内设置有第二液位检测元件以及第三液位检测元件,所述第二液位检测元件、所述第三液位检测元件沿竖直方向分布于所述储液腔内壁上,且所述第二液位检测元件位于所述第三液位检测元件的上方。
通过这样设置,设置于储液腔内第二液位检测元件、第三液位检测元件分别检测储液腔内液位高位以及低位,当第二液位检测元件检测到液位时,可停止补液,减少补液过程中因补液过多而造成液体溢出的情况发生;当第三液位检测元件检测到液位时,则此时储液腔内的液体较少,需要进行补液,可将此检测信号作为补液信号,控制移动机器人移动至固定基站进行补液。
作为优选,所述扩散组件包括风机,所述风机与所述蓄电池电性连接。
通过这样设置,蓄电池为风机提供工作电源,通过风机将雾化后的气体由扩散腔喷出,提高雾化气体扩散的范围,提高雾化扩散效果。
作为优选,所述第二定位部包括激光发射组件,所述第一定位部包括激光接收组件。
通过这样设置,激光发射组件和激光接收组件可辅助移动机器人移动至固定基站内的定位,有利于提高移动机器人移动的精确性。
作为优选,第二定位部还可以选用红外发射定位装置、超声波发射定位装置,第一定位部可选用对应的红外接收定位装置、超声波接收定位装置。
通过这样设置,均能起到对移动机器人定位及导向的效果。
相对于现有技术,本实用新型取得了有益的技术效果:
1、设置固定基站,在固定基站内设置液体补液部以及电源充电部,当移动机器人缺液和/或缺电时,移动机器人可移动至固定基站内进行补液和/或补电,减少需要人工补液及充电的麻烦,有利于提高雾化过程的自动化程度。
2、设置补液管,并将其设置为伸缩管,配合升降驱动件,在补液时,可使补液管与补液接头进行对接,以减少补液过程中液体飞溅的情况发生。
3、将雾化腔与储液腔分离,并设置扩散腔,通过扩散组件对雾化后的气体进行扩散,提高雾化扩散的效果。
附图说明
图1是本实用新型其中一实施例中自动雾化系统的整体结构示意图;
图2是本实用新型其中一实施例中移动机器人的整体结构示意图;
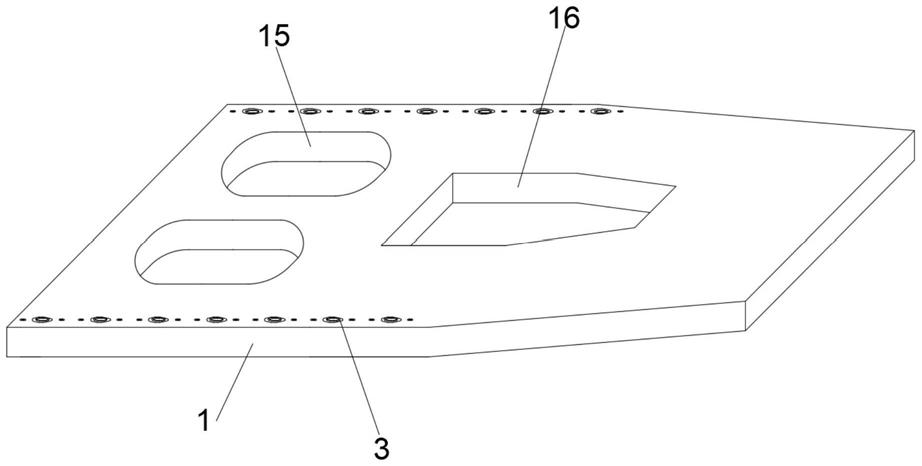
图3是本实用新型实施例1中自动雾化系统的俯视方向示意图;
图4是本实用新型实施例2中自动雾化系统的俯视方向示意图。
图5是本实用新型实施例3中移动机器人的整体结构示意图。
其中,各附图标记所指代的技术特征如下:
1、移动机器人;101、底座;102、行走组件;1021、移动轮;103、雾化组件;1031、雾化器;104、蓄电池;1041、充电接头;105、储液腔;1051、补液管;1052、第二液位检测元件;1053、第三液位检测元件;106、行走控制器;107、第一定位部;1071、激光接收组件;108、外罩;109、升降驱动件;110、雾化腔;1101、抽液泵;11011、进液管;11012、抽液控制器;1102、第一液位检测元件;1103、雾化出气口;11031、出气管;110311、出气孔;111、扩散腔;1111、扩散组件;11111、风机;2、固定基站;201、侧壁;202、顶壁;3、液体补料部;301、补液接头;4、电源充电部;5、第二定位部;501、激光发射组件;502、定位滑槽。
具体实施方式
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合实施例对本实用新型进行进一步详细说明,但本实用新型要求保护的范围并不局限于下述具体实施例。
实施例1
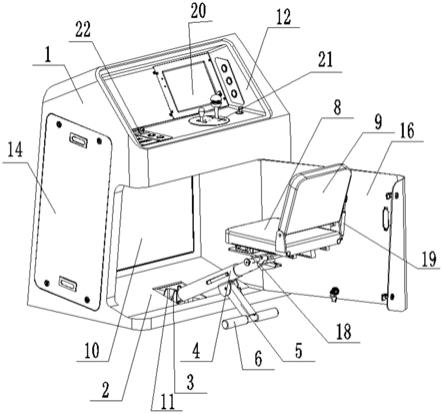
参考图1~3,本实施例公开了一种自动雾化系统,包括移动机器人1,移动机器人1包括底座101、行走组件102以及雾化组件103,行走组件102设置于底座101的下方,雾化组件103设置于底座101的上方,行走组件102包括驱动电机(图中未示出)、移动轮1021、避障组件(图中未示出)以及视觉传感器(图中未示出),避障组件设置于底座101的侧部,用于检测障碍物并进行障碍物的避让,其可采用现有技术的避障组件,例如红外避障传感器、超声波传感器,其工作原理在此不再赘述,视觉传感器可采用摄像机,器固定于移动机器人1的顶部或侧部,其工作原理为现有技术,在此也不再赘述。
自动雾化系统还包括固定基站2,固定基站2内设置有液体补料部3以及电源充电部4,移动机器人1上设置蓄电池104以及储液腔105,蓄电池104与行走组件102连接并为其供电,具体地,底座101上还设置有行走控制器106,行走控制器106与蓄电池104、行走组件102的驱动电机均电性连接,通过行走控制器106控制驱动电机运转;
储液腔105与雾化组件103连接并为其提供雾化液体,雾化液体可以是消毒水,还可以是清水,储液腔105还连接有补液管1051,补液管1051与液体补料部3对接,蓄电池104还连接有充电接头1041,充电接头1041与电源充电部4对接;
本实施例中,充电接头1041与电源充电部4可通过接触触点的形式对接,还可以将电源充电部4与充电接头1041设置为以现有技术中常用的无线充电的形式对接。
参考图1、图3,移动机器人1还设置有第一定位部107,固定基站2内还对应第一定位部107设置有第二定位部5。
参考图3,本实施例中,第二定位部5包括激光发射组件501,第一定位部107包括激光接收组件1071,图中线条指示激光光线的发射范围,激光发射组件501、激光接收组件1071分别采用现有技术中激光发射组件501、激光接收组件1071,激光接收组件1071沿底盘的侧向均布多个,激光发射组件501也设置多个,固定设置于固定基座上,通过激光发射组件501向外发射激光信号,为移动机器人1在字条调整时进行提供路径规划的提供参考,激光定位的原理为现有技术,在此不再赘述。
在其他实施例中,第二定位部5还可以选用红外发射定位装置、超声波发射定位装置,第一定位部107可选用对应的红外接收定位装置、超声波接收定位装置,均能起到对移动机器人定位及导向的效果。
参考图1、图2,移动机器人1包括与底座101固定的外罩108,补液管1051的开口朝上设置且位于外罩108的顶部,液体补料部3包括补液接头301,固定基站2为一侧开口的箱状结构,包括侧壁201、顶壁202,补液接头301固定于固定基站2的顶壁202上,且补液接头301开口朝下,补液接头301与蓄液池(图中未示出)连接,蓄液池内还设置有补料泵(图中未示出),通过补料泵将蓄液池中的液体向补液接头301输送;
参考图1,移动机器人1移动至固定基站2内,移动到位到位后,补液接头301位于补液管1051的开口的正上方、充电接头1041与电源充电部4对接。
本实施例中,补液管1051为伸缩管,补液管1051可以是伸缩软管,还可以是伸缩金属管。
参考图1、图2,本实施例中,底座101以及外罩108为圆柱形。
在其他实施例中,为便于实现补液管1051与补料接头的定位,伸缩管可设置于移动机器人1的中心。
本实施例中,补液管1051的开口设置为喇叭状。
参考图2,底座101内设置有升降驱动件109,升降驱动件与补液管1051固定,并驱动补液管1051沿竖直方向升降。
升降驱动件109可以是气动伸缩缸、液动伸缩缸或电动伸缩缸。
参考图2,底座101上还设置有雾化腔110以及扩散腔111,扩散腔111内设置有扩散组件1111,雾化腔110的上部与扩散腔111连通,雾化组件103设置于雾化腔110内;
雾化腔110的顶部开设有雾化出气口1103,外罩108对应出气口1103开设有通孔(图中未标注);
雾化腔110内还设置抽液泵1101,抽液泵1101的进液端连接有进液管11011,进液管11011延伸至储液腔105内的液面之下,抽液泵1101的出液端位于雾化腔110内。
参考图2,雾化组件103包括雾化器1031,雾化器1031采用超声波雾化器1031,雾化器1031与蓄电池104电性连接,雾化器1031固定于雾化腔110的底部,雾化腔110的内壁上还设置有第一液位检测元件1102,第一液位检测元件1102所在的高度与雾化器1031的上表面平齐。
参考图2,抽液泵1101还与抽液控制器11012连接,第一液位检测元件1102与抽液控制器11012连接,通过抽液控制器11012控制抽液泵1101的启停。
本实施例中,行走控制器106、抽液控制均采用现有技术中的控制器,例如plc、单片机。
参考图2,储液腔105内设置有第二液位检测元件1052以及第三液位检测元件1053,第二液位检测元件1052、第三液位检测元件1053沿竖直方向分布于储液腔105内壁上,且第二液位检测元件1052位于第三液位检测元件1053的上方。
本实施例中第一检测元件、第二检测元件以及第三检测元件均采用现有技术中常用的液位传感器。
扩散组件1111包括风机11111,风机11111与蓄电池104电性连接。
本实用新型实施例的使用过程:
当第三液位检测元件1053检测到液位时,则此时储液腔105内的液体较少,需要进行补液,第三液位检测元件1053将此检测信号输送至行走控制器106,行走控制器106控制控制移动机器人1向固定基站2移动;
通过第二定位部5、第一定位部107,为移动机器人1的移动到位提供辅助导向,最终使充电接头1041与电源充电部4对接、补液管1051位于液体补料部3的补料接头的正下方,可通过升降驱动组件驱动补液管1051升起,使补液管1051与补料接头对接;
通过补料泵抽取蓄液池中的液体,经补料接头,向补液管1051补料,进而将液体补充至储料腔中;
当第二液位检测元件1052检测到液位时,停止补液,减少补液过程中因补液过多而造成液体溢出的情况发生。
实现移动机器人1补液、充电的自动化。
实施例2
参考图1、图4,本实施例公开另一种雾化系统,基于实施例1,本实施例与实施例1区别的地方在于:
在其他实施例中,第一定位部107与第二定位部5还可额外设置机械定位的方式,具体地,第二定位部5还包括固定设置于固定基站2内的定位滑槽502,第一定位部107还包括固定于移动机器人1上并与定位滑槽502或定位滑轨滑动配合的滑块(图中未示出),移动机器人1想固定基站2滑动时,通过滑块沿定位滑槽502过定位滑轨滑动,将移动机器人1姿态进行调整,使其能顺利进入固定基站2内,并使补液管1051与液体补料部3对接,充电接头1041与电源充电部4对接。
实施例3
参考图5,本实施例公开另一种雾化系统,基于上述实施例,本实施例与上述实施例区别的地方在于:
本实施例中,在雾化出气口1103处设置有可伸缩的出气管11031,出气管11031沿竖直方向可升降,在雾化腔110内固定有驱动出气管11031沿竖直方向伸缩的伸缩驱动件(图中未示出),伸缩驱动件可以电动推杆、气动推杆中的一种,伸缩驱动件可固定于外罩108的顶面或设置于雾化腔110的内部,其伸缩端与出气管11031固定,出气管11031的周向还可开设有若干出气孔110311,通过这样设置,在运用本实施例的雾化系统用于雾化消毒水进行消杀工作时,伸缩驱动件驱动出气管11031伸长而从高出于外罩108顶面,并通过轴向设置的若干出气孔110311,将雾化的气体进行扩散,扩大气体扩散的范围,提高消杀的效果;而在不工作的状态下,可通过伸缩驱动件驱动出气管11031缩回雾化腔110内,进行收纳,一方面是出于美观考虑,另一方面可对出气管进行保护,减少外界对其造成破坏,延长其使用寿命。
根据上述说明书的揭示和教导,本实用新型所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本实用新型并不局限于上面揭示和描述的具体实施方式,对实用新型的一些修改和变更也应当落入本实用新型的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对实用新型构成任何限制。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。