1.本实用新型属于小车自主驾驶技术领域,具体涉及一种基于电磁感应自主循迹小车运动场景下目标检测装置。
背景技术:
2.随着科技的飞速发展带动各个研究领域技术的不断提升,智能化应用已成为现代生产方式的必须存在条件。在智能化发展中,智能技术在工业、军事等多个领域中有着广泛的应用,其中发展最迅速的且生产生活中最常用到的就是移动智能小车。智能小车是按照一定的规定行驶在特定环境下,利用外部传感器感知环境,联合智能小车本身状态,完成一系列执行行为,适合在恶劣复杂环境中工作。
3.现阶段智能小车很多是通过仿真实验进行监测,如果与智能小车实际运行时问题相结合,需要通过图像监控对智能小车运动场景下进行目标检测。目标检测是将图像或者视频中目标与其他不感兴趣的部分进行区分,判断是否存在目标,确定目标位置的一种计算机视觉任务。传统的机器视觉目标检测根据颜色、纹理、形状等特性对目标进行判断识别,此类方法在光照变化时影响很大,图形畸变明显的复杂情况下很难得到令人满意的数据信息,难以取得较好的识别效果。在复杂驾驶复杂环境下,针对智能小车自主驾驶时如何准确自主循迹,以及小车在路面行驶时拍摄的轨迹行驶视频,目标极易快速运动,发生光照、形态以及遮挡等变化,极容易发生小车运行时偏离预先设定的轨迹和目标误判等情况,因此需要考虑建立一种电路设计简单、经济环保、可靠性高、无需人工干预,具备环境感知、自主行动的智能小车运动场景下准确对目标检测的装置系统。
技术实现要素:
4.本实用新型的目的在于提供一种电磁感应自主循迹小车运动场景下目标检测装置。
5.本实用新型包括小车自主循迹主控模块和路况目标图像检测模块。小车自主循迹主控模块包括控制模块、电感循迹模块、编码器测速测距模块、车速与里程显示模块、电机驱动模块和主控uart转usb模块。路况目标图像检测模块包括树莓派图像控制核心、摄像头模块、舵机驱动模块和树莓派uart转usb模块。电感循迹模块将获取的铺设轨道的电磁感应信息传输给控制模块,编码器测速测距模块检测小车行驶过程中的速度和里程传输给控制模块;控制模块连接到车速与里程显示模块内的液晶显示屏。控制模块通过电感循迹模块内的电磁传感器和摄像头模块获取小车行驶数据信息,利用电机驱动模块通过控制电机车速。摄像头模块通过摄像头获取道路路况实时图像信息传输给树莓派图像控制核心;树莓派图像控制核心控制舵机驱动模块实现舵机对摄像头上下转动与左右转动的驱动。主控uart转usb模块与树莓派uart转usb模块通过usb数据线相连,进行控制模块与树莓派图像控制核心的通信。
6.作为优选,所述的树莓派图像控制核心内使用的树莓派u14的型号为
raspberrypi4b。
7.作为优选,所述的摄像头模块包括摄像头csi接口u18、树莓派摄像头、第四十三电容c43、第十七电阻rs17和第十八电阻rs18。树莓派摄像头的采用树莓派pi camera v2
8.8mp摄像头。树莓派摄像头通过15线电缆插入到摄像头csi接口u18。摄像头csi接口u18的1、4、7、10引脚相连均接地。摄像头csi接口u18的15引脚和第四十三电容c43的一端均接3.3v电压。第四十三电容c43的另一端接地。摄像头csi接口u18的13引脚与第十七电阻rs17的一端、树莓派u14的第5引脚相连;摄像头csi接口u18的14引脚与第十八电阻rs18的一端、树莓派u14的第3引脚相连。第十七电阻rs17和第十八电阻rs18的另一端均接到3.3v电压。摄像头csi接口u18的2、3、5、6、11、12引脚与树莓派u14的11、12、13、15、16、28引脚分别相连。摄像头csi接口u18的8、9引脚均与树莓派u14的23引脚相连。摄像头csi接口u18的13引脚与树莓派u14的5引脚相连。
9.作为优选,所述的舵机驱动模块包括舵机驱动芯片u15、第十九电阻rs19、第二十电阻rs20、第二十一电阻rs21、第四十八电容c48、上下转动舵机u16和左右转动舵机u17。舵机驱动芯片u15的型号为pca9685。上下转动舵机u16采用型号为lfd
‑
01的防堵转舵机。左右转动舵机u17采用型号为lfd
‑
06的防堵转舵机。舵机驱动芯片u15的26、27引脚与树莓派u14的26、27引脚分别相连。舵机驱动芯片u15的1、2、3、4、5、14、24引脚均接地。舵机驱动芯片u15的28引脚及第四十八电容c48的一端接3.3v电压;第四十八电容c48的另一端接地。舵机驱动芯片u15的23引脚与第二十一电阻rs21的一端相连;第二十一电阻rs21的另一端接地。舵机驱动芯片u15的15引脚与第十九电阻rs19的一端相连,第十九电阻rs19的另一端接上下转动舵机u16的1引脚。舵机驱动芯片u15的18引脚与第二十电阻rs20的一端相连,第二十电阻rs20的另一端接左右转动舵机u17的1引脚。上下转动舵机u16的2引脚和左右转动舵机u17的2引脚均接6v电压,上下转动舵机u16的3引脚和左右转动舵机u17的3引脚均接地。
10.作为优选,所述的树莓派uart转usb模块包括第一usb转接芯片u20、第一usb接口u19、第四十六电容c46、第二十二电阻rs22、第二十三电阻rs23、第四十七电容c47、第二十四电阻rs24、第四十四电容c44、第四十五电容c45、第三三极管q3、第二十五电阻rs25、第二十六电阻rs26、第四三极管q4、第四发光二极管le4、第二十七电阻rs27。第一usb转接芯片u20的型号为ch340g。第一usb转接芯片u20的3、2引脚与树莓派u14的8、10引脚分别相连。第一usb接口u19的1引脚接5v电压,第4引脚接地。第四十四c44电容一端和第四十五电容c45的一端均接5v电压;第四十四c44电容另一端和第四十五电容c45的另一端均接地。第一usb接口u19第2引脚与第二十二电阻rs22的一端相连;第二十二电阻rs22的另一端与第一usb转接芯片u20的6引脚相连。第一usb接口u19第3引脚与第二十三电阻rs23的一端相连;第二十三电阻rs23的另一端与第一usb转接芯片u20的5引脚相连。第一usb转接芯片u20的1引脚接地,16引脚接5v电压。第一usb转接芯片u20的2引脚与树莓派u14的10引脚相连,第一usb转接芯片u20的3引脚与树莓派u14的9引脚相连。第一usb转接芯片u20的4引脚与第四十六电容c46的一端相连,第四十六电容c46的另一端接地。第四十七电容c47的一端接5v电压,另一端接地。第一usb转接芯片u2014引脚与第二十四电阻rs24的一端相连,第二十四电阻rs24的另一端与第三三极管q3的基极相连。第一usb转接芯片u20的13引脚与第三三极管q3发射极相连。第三三极管q3的集电极与第二十五电阻rs25的一端相连,第二十五电阻rs25的另一端与第二十六电阻rs26的一端、第四三极管q4的基极相连。第二十六电阻rs26的另
一端与第四发光二极管le4的负极相连均接地。第四发光二极管le4的正极与第二十七电阻rs27的一端相连均接地,第二十七电阻rs27的另一端与第四三极管q4的发射极相连。第四三极管q4的集电极接5v电压。
11.作为优选,所述的控制模块内的控制器u1采用型号为stm32f103zet6的单片机。
12.作为优选,所述的电机驱动模块包括前轮电机驱动芯片u9、后轮电机驱动芯片u10、前向左轮直流电机、前向右轮直流电机、后向左轮直流电机和后向右轮直流电机。前轮电机驱动芯片u9和后轮电机驱动芯片u10的型号均为tb6612fng;后轮电机驱动芯片u10的3、4、10、11、18引脚接地,19、20引脚接3.3v电压,13、14、24引脚接12v电压。后轮电机驱动芯片u10的15、16、17、21、22、23引脚与控制器u1的37、41、40、36、35、34引脚分别相连。后轮电机驱动芯片u10的1、2引脚均与后向左轮直流电机的第一接线端相连。后轮电机驱动芯片u10的5、6引脚均与后向左轮直流电机的第二接线端相连。后轮电机驱动芯片u10的11、12引脚均与后向右轮直流电机的第一接线端相连。tb6612后轮电机驱动芯片u107、8引脚与后向右轮直流电机的第二接线端相连。前轮电机驱动芯片u9的3、4、10、11、18引脚均接地,19、20引脚均接3.3v电压,13、14、24引脚均接12v电压。前轮电机驱动芯片u9的15、16、17、21、22、23引脚与控制器u1的88、90、89、87、57、56引脚分别相连。前轮电机驱动芯片u9的1、2引脚均与前向左轮直流电机的第一接线端相连。前轮电机驱动芯片u9的5、6引脚均与前向左轮直流电机的第二接线端相连。前轮电机驱动芯片u9的11、12引脚均与前向右轮直流电机的第一接线端相连。tb6612前轮电机驱动芯片u97、8引脚与前向右轮直流电机的第二接线端相连。
13.所述的车速与里程显示模块包括光电传感器u8,检测比较器u7,第四十二电容c42,第十一电阻rs11,第十二电阻rs12,第十三电阻rs13,第十四电阻rs14和第十五电阻rs15。光电传感器u8的型号为itr9702;检测比较器u7的型号为lm393f。光电传感器u8的1引脚与第十一电阻rs11的一端相连,第十一电阻rs11的另一端和第十二电阻rs12的一端均接3.3v电压。光电传感器u8的2、4引脚和第十五电阻r15的一端均接地。光电传感器u8的3引脚、lm393f检测比较器u7的2引脚和第十三电阻rs13的一端相连,第十三电阻rs13的另一端接3.3v电压。lm393f检测比较器u7的1脚与第四十二电容c42、第十四电阻rs14的一端以及控制器u1的59引脚相连。lm393f检测比较器u7的3引脚与第十二电阻rs12、第十五电阻rs15的另一端相连。lm393f检测比较器u7的5引脚与第十四电阻rs14的另一端相连均接3.3v电压。lm393f检测比较器u7的4引脚与第四十二电容c42的另一端均接地。
14.作为优选,所述的电感循迹模块包括电磁传感器u2、第三电阻rs3、第四电阻rs4、第六电容c6、第七电容c7、第八电容c8、第九电容c9、第十电容c10、第十一电容c11、第十二电容c12、第十三电容c13、第十四电容c14、第十五电容c15、第十六电容c16、第十七电容c17、第十八电容c18、第十九电容c19、第二十电容c20、第二十一电容c21、第二十二电容c22、第二十三电容c23、第二十四电容c24、第二十五电容c25、第二十六电容c26和第二十七电容c27。电磁传感器u2的型号为ldc1314。电磁传感器u2的3、8、17引脚相连均接地。电磁传感器u2的1引脚与第四电阻rs4一端、控制器u1的69引脚相连。电磁传感器u2的2引脚与第三电阻rs3一端、控制器u1的69引脚相连。第四电阻rs4另一端与第三电阻rs3另一端相连均接3.3v电压。电磁传感器u2的7引脚与第六电容c6、第七电容c7一端相连均接3.3v电压。第六电容c6、第七电容c7另一端相连均接地。电磁传感器u2的4、5、6引脚与控制器u1的29、44、45
引脚分别相连。电磁传感器u2的9引脚与第一组电感极片的b端、第九电容c9、第十电容c10、第十二电容c12的一端相连。电磁传感器u2的10引脚与第一组电感极片的a端、第十二电容c12的另一端、第八电容c8、第十一电容c11的一端相连。第八电容c8、第十一电容c11的另一端与第九电容c9、第十电容c10的另一端相连均接地。电磁传感器u2的11引脚与第二组电感极片的b端、第十四电容c14、第十五电容c15、第十六电容c16的一端相连。电磁传感器u2的12引脚与第一组电感极片的a端、第十六电容c16的另一端、第十三电容c13、第十七电容c17的一端相连。第十三电容c13、第十七电容c17的另一端与第十四电容c14、第十五电容c15的另一端相连均接地。电磁传感器u2的13引脚与第四组电感极片的b端、第十九电容c19、第二十一电容c21、第二十二电容c22的一端相连。电磁传感器u2的14引脚与第四组电感极片的a端、第二十二电容c22的另一端、第十八电容c18、第二十电容c20的一端相连。第十八电容c18、第二十电容c20的另一端与第十九电容c19、第二十一电容c21的另一端相连均接地。电磁传感器u2的15引脚与第三组电感极片的b端、第二十四电容c24、第二十六电容c26、第二十七电容c27的一端相连。电磁传感器u2的16引脚与第三组电感极片a端、第二十七电容c27的另一端、第二十三电容c23、第二十五电容c25的一端相连。第二十三电容c23、第二十五电容c25的另一端与第二十四电容c24、第二十六电容c26的另一端相连均接地。
15.作为优选,所述的主控uart转usb模块包括第二usb接口u11,第二usb转接芯片u12,第五电阻rs5,第六电阻rs6,第七电阻rs7,第八电阻rs8,第九电阻rs9,第十电阻rs10,第一pnp型三级管q1,第二pnp型三级管q2,第一led发光二极管le1,第二十八电容c28,第二十九电容c29,第三十电容c30和第三十一电容c31。第二usb转接芯片u12的型号为ch340g。第二usb接口u11的1引脚、第二十八电容c28和第二十九电容c29的一端均接5v电压。第二usb接口u11的4引脚、第二十八电容c28和第二十九电容c29的另一端均接地。第二usb接口u11的2引脚与第五电阻rs5一端相连;第五电阻rs5的另一端与第二usb转接芯片u12的6引脚相连。第二usb接口u11的3引脚与第六电阻rs6的一端相连,第六电阻rs6的另一端与第二usb转接芯片u12的5引脚相连。第二usb转接芯片u12的1引脚接地,16引脚接5v电压。第二usb转接芯片u12的2引脚与控制器u1的102引脚相连,3引脚与控制器u1的101引脚相连。第二usb转接芯片u12的4引脚与第三十一电容c31的一端相连,第三十一电容c31的另一端接地。第三十电容c30的一端接5v电压,另一端接地。第二usb转接芯片u12的14引脚与第一三级管q1基极相连,13引脚与第一三级管q1发射极相连。第一三级管q1集电极与第八电阻rs8一端相连,第八电阻rs8另一端、第九电阻rs9的一端和第二三极管q2的基极相连。第九电阻rs9的另一端、第一发光二极管le1的一端相连均接地。第十电阻rs10的一端、第一发光二极管le1的另一端相连均接5v电压。第十电阻rs10的另一端与第二三极管q2的发射极相邻。第二三极管q2集电极接5v电压。
16.作为优选,本实用新型还包括电源供电模块。所述的电源供电模块通过第一稳压芯片将外部输入的12v电压转换为5v电压为树莓派图像控制核心、树莓派uart转usb模块、车速与里程显示模块、主控uart转usb模块供电。电源供电模块通过第二稳压芯片将5v电压转换为3.3v电压为控制模块、电感循迹模块、编码器测速测距模块、树莓派控制核心、摄像头模块和舵机驱动模块供电。电源供电模块通过第三稳压芯片将外部输入的12v电压转换为6v电压为舵机驱动模块对应的舵机供电。
17.本实用新型具有的有益效果是:
18.1.本实用新型利用电磁传感器来实现小车在铺设金属丝轨道上自主循迹,配合树莓派摄像头实现小车在自主行驶中实时获取道路状况图像信息。相较于现有的红外循迹小车,本实用新型利用电磁检测的特点极大提升小车自主行驶时的体验感,小车面临复杂路况时也可以准确判断。
19.2、本实用新型应用的电磁感应传感技术很好的解决了轨道铺设金属丝小车自主循迹问题,进而提高了小车行驶的精度。
20.3、本实用新型应用的树莓派摄像头采集图像,应用图像处理与机器学习技术很好的解决了小车即使面临复杂路况也可以准确自主行驶。
附图说明
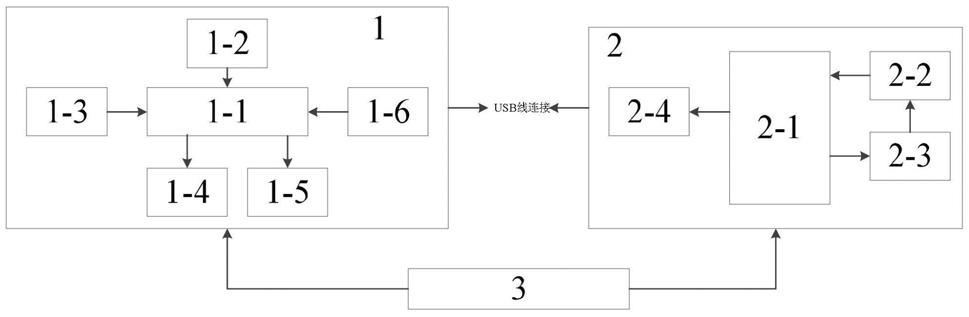
21.图1是本实用新型的系统框图;
22.图2是本实用新型中树莓派图像控制核心的外围电路图;
23.图3是本实用新型中摄像头模块的电路原理图;
24.图4是本实用新型中舵机驱动模块的电路原理图;
25.图5是本实用新型中树莓派uart转usb模块的电路原理图;
26.图6是本实用新型中控制模块的电路原理图;
27.图7是本实用新型中电机驱动模块的电路原理图;
28.图8是本实用新型中车速与里程显示模块的电路原理图;
29.图9是本实用新型中电感循迹模块的电路原理图;
30.图10是本实用新型中主控uart转usb模块的电路原理图;
31.图11是本实用新型中电源供电模块的电路原理图。
具体实施方式
32.以下结合附图对本实用新型作进一步说明。
33.如图1所示,一种电磁感应自主循迹小车在运动场景下的目标检测装置,包括电源供电模块3、小车自主循迹主控模块1和路况目标图像检测模块2。小车自主循迹主控模块1包括控制模块1
‑
1、电感循迹模块1
‑
2、编码器测速测距模块1
‑
3、车速与里程显示模块1
‑
4、电机驱动模块1
‑
5和主控uart转usb模块1
‑
6。路况目标图像检测模块2包括树莓派图像控制核心2
‑
1、摄像头模块2
‑
2、舵机驱动模块2
‑
3和树莓派uart转usb模块2
‑
4。树莓派图像控制核心2
‑
1内使用的树莓派u14的型号为raspberry pi 4b。
34.电源供电模块3通过第一稳压芯片将外部输入的12v电压转换为5v电压为树莓派图像控制核心2
‑
1、树莓派uart转usb模块2
‑
4、车速与里程显示模块1
‑
4、主控uart转usb模块供电。电源供电模块通过第二稳压芯片将5v电压转换为3.3v电压为控制模块1
‑
1内的stm32单片机、电感循迹模块1
‑
2、编码器测速测距模块1
‑
3、树莓派控制核心、摄像头模块2
‑
2和舵机驱动模块2
‑
3供电。电源供电模块通过第三稳压芯片将外部输入的12v电压转换为6v电压为舵机驱动模块2
‑
3对应的舵机供电。外部输入的12v电压滤波后直接为电机驱动模块供电。电感循迹模块1
‑
2将获取的铺设轨道的电磁感应信息传输给控制模块1
‑
1,编码器测速测距模块1
‑
3检测小车行驶过程中的速度和里程传输给控制模块1
‑
1;控制模块1
‑
1连接到lcd显示屏,以显示车速与里程。控制模块1
‑
1通过电感循迹模块1
‑
2内的电磁感应传感
器和摄像头模块2
‑
2获取小车行驶数据信息利用电机驱动模块1
‑
5通过控制电机车速实现小车自主行驶。摄像头模块2
‑
2通过获取道路路况实时图像信息传输给树莓派图像控制核心2
‑
1,树莓派图像控制核心2
‑
1控制舵机驱动模块2
‑
3实现舵机对摄像头上下转动与左右转动的驱动,使得摄像头对道路路况实时图像可以准确获取。主控uart转usb模块1
‑
6与树莓派uart转usb模块2
‑
4通过usb数据线相连。
35.如图2所示,树莓派摄像头的采用树莓派pi camera v28mp摄像头。树莓派u14的1、17引脚接电源供电模块的3.3v供电输出端。树莓派u14的2、4引脚接电源供电模块的5v供电输出端。树莓派u14的3引脚与摄像头csi接口u18的第14引脚相连;树莓派u14的5引脚与摄像头csi接口u18的13引脚相连。
36.如图3所示,摄像头模块2
‑
2包括摄像头csi接口u18、树莓派摄像头、第四十三电容c43、第十七电阻rs17和第十八电阻rs18。树莓派u14的6、9、14、20、25、30、34、39引脚均接地。树莓派pi camera v28mp摄像头通过15线电缆插入到摄像头csi接口u18。摄像头csi接口u18的1、4、7、10引脚相连均接地。摄像头csi接口u18的15引脚和第四十三电容c43的一端均接电源供电模块的3.3v供电输出端。第四十三电容c43的另一端接地。摄像头csi接口u18的13引脚与第十七电阻rs17的一端、树莓派u14的第5引脚相连;摄像头csi接口u18的14引脚与第十八电阻rs18的一端、树莓派u14的第3引脚相连。第十七电阻rs17和第十八电阻rs18的另一端均接到电源供电模块的3.3v供电输出端。摄像头csi接口u18的2、3、5、6、11、12引脚与树莓派u14的11、12、13、15、16、28引脚分别相连。摄像头csi接口u18的8、9引脚均与树莓派u14的23引脚相连。
37.如图4所示,舵机驱动模块2
‑
3包括舵机驱动芯片u15、第十九电阻rs19、第二十电阻rs20、第二十一电阻rs21、第四十八电容、上下转动舵机u16和左右转动舵机u17。舵机驱动芯片u15的型号为pca9685。上下转动舵机u16采用型号为lfd
‑
01的防堵转舵机。左右转动舵机u17采用型号为lfd
‑
06的防堵转舵机。舵机驱动芯片u15的26、27引脚与树莓派u14的26、27引脚分别相连。舵机驱动芯片u15的1、2、3、4、5、14、24引脚均接地。舵机驱动芯片u15的28引脚及第四十八电容c48的一端接电源供电模块的3.3v供电输出端;第四十八电容c48的另一端接地。舵机驱动芯片u15的23引脚与第二十一电阻rs21的一端相连;第二十一电阻rs21的另一端接地。舵机驱动芯片u15的15引脚与第十九电阻rs19的一端相连,第十九电阻rs19的另一端接上下转动舵机u16的1引脚。舵机驱动芯片u15的18引脚与第二十电阻rs20的一端相连,第二十电阻rs20的另一端接左右转动舵机u17的1引脚。上下转动舵机u16的2引脚和左右转动舵机u17的2引脚均接电源供电模块的6v供电输出端,上下转动舵机u16的3引脚和左右转动舵机u17的3引脚均接地。
38.如图5所示,树莓派uart转usb模块2
‑
4包括第一usb转接芯片u20、第一usb接口u19、第四十六电容c46、第二十二电阻rs22、第二十三电阻rs23、第四十七电容c47、第二十四电阻rs24、第四十四电容c44、第四十五电容c45、第三三极管q3、第二十五电阻rs25、第二十六电阻rs26、第四三极管q4、第四发光二极管le4、第二十七电阻rs27。第一usb转接芯片u20的型号为ch340g。第一usb转接芯片u20的3、2引脚与树莓派u14的8、10引脚分别相连。第一usb接口u19的1引脚接电源供电模块的5v供电输出端,第4引脚接地。第四十四c44电容一端和第四十五电容c45的一端均接电源供电模块的5v供电输出端;第四十四c44电容另一端和第四十五电容c45的另一端均接地。第一usb接口u19第2引脚与第二十二电阻rs22的一端
相连;第二十二电阻rs22的另一端与第一usb转接芯片u20的6引脚相连。第一usb接口u19第3引脚与第二十三电阻rs23的一端相连;第二十三电阻rs23的另一端与第一usb转接芯片u20的5引脚相连。第一usb转接芯片u20的1引脚接地,16引脚接电源供电模块的5v供电输出端。第一usb转接芯片u20的2引脚与树莓派u14的10引脚相连,第一usb转接芯片u20的3引脚与树莓派u14的9引脚相连。第一usb转接芯片u20的4引脚与第四十六电容c46的一端相连,第四十六电容c46的另一端接地。第四十七电容c47的一端接电源供电模块的5v供电输出端,另一端接地。第一usb转接芯片u2014引脚与第二十四电阻rs24的一端相连,第二十四电阻rs24的另一端与第三三极管q3的基极相连。第一usb转接芯片u20的13引脚与第三三极管q3发射极相连。第三三极管q3的集电极与第二十五电阻rs25的一端相连,第二十五电阻rs25的另一端与第二十六电阻rs26的一端、第四三极管q4的基极相连。第二十六电阻rs26的另一端与第四发光二极管le4的负极相连均接地。第四发光二极管le4的正极与第二十七电阻rs27的一端相连均接地,第二十七电阻rs27的另一端与第四三极管q4的发射极相连。第四三极管q4的集电极接电源供电模块的5v供电输出端。
39.如图6所示,控制模块1
‑
1包括控制器u1、第一电容c1、第二电容c2、第三电容c3、第四电容c4、第五电容c5、第一电阻rs1、第二电阻rs2、第一按键开关sw1、第一晶振osc1和第二晶振osc2。车速与里程显示模块1
‑
4包括液晶显示屏u3。控制器u1采用型号为stm32f103zet6的单片机;液晶显示屏u3型号为lcd 12864。控制器u1的复位引脚(25引脚)与第一电容c1、第一电阻rs1及第一按键开关sw1的一端相连。第一电容c1及第一按键开关sw1的另一端均接地。第一电阻rs1的另一端接电源供电模块的3.3v供电输出端。控制器u1的72、108、144、39、17、52、62、84、95、121、131引脚均接电源供电模块的3.3v供电输出端;控制器u1的71、107、143、38、16、51、61、83、94、120、130引脚均接地。控制器u1的8引脚与第一晶振osc1、第二电容c2的一端相连;控制器u1的9引脚与第一晶振osc1的另一端、第三电容c3的一端相连。第二电容c2及第三电容c3的另一端均接地。控制器u1的23引脚与第二晶振osc2、第二电阻rs2、第五电容c5的一端相连;控制器u1的24引脚与第二晶振osc2、第二电阻rs2、第四电容c4的一端相连。第四电容c4及第五电容c5的另一端均接地。液晶显示屏u3的1、20引脚相连均接地,液晶显示屏u3的2、19引脚均接电源供电模块的5v供电输出端。液晶显示屏u3的4、5、6、7、8、9、10、11、12、13、14、15、17引脚与控制器u1的114、115、117、77、78、79、80、81、82、85、86、1、2引脚分别相连。
40.如图7所示,电机驱动模块1
‑
5包括前轮电机驱动芯片u9、后轮电机驱动芯片u10、前向左轮直流电机、前向右轮直流电机、后向左轮直流电机和后向右轮直流电机。前轮电机驱动芯片u9和后轮电机驱动芯片u10的型号均为tb6612fng;四个直流电机的型号均为chr
‑
gm25
‑
370。后轮电机驱动芯片u10的3、4、10、11、18引脚接地,19、20引脚接电源供电模块的3.3v供电输出端,13、14、24引脚接电源供电模块12v供电输出端。后轮电机驱动芯片u10的15、16、17、21、22、23引脚与控制器u1的37、41、40、36、35、34引脚分别相连。后轮电机驱动芯片u10的1、2引脚均与后向左轮直流电机的第一接线端相连。后轮电机驱动芯片u10的5、6引脚均与后向左轮直流电机的第二接线端相连。后轮电机驱动芯片u10的11、12引脚均与后向右轮直流电机的第一接线端相连。tb6612后轮电机驱动芯片u107、8引脚与后向右轮直流电机的第二接线端相连。前轮电机驱动芯片u9的3、4、10、11、18引脚均接地,19、20引脚均接电源供电模块的3.3v供电输出端,13、14、24引脚均接电源供电模块12v供电输出端。前轮电机
驱动芯片u9的15、16、17、21、22、23引脚与控制器u1的88、90、89、87、57、56引脚分别相连。前轮电机驱动芯片u9的1、2引脚均与前向左轮直流电机的第一接线端相连。前轮电机驱动芯片u9的5、6引脚均与前向左轮直流电机的第二接线端相连。前轮电机驱动芯片u9的11、12引脚均与前向右轮直流电机的第一接线端相连。tb6612前轮电机驱动芯片u97、8引脚与前向右轮直流电机的第二接线端相连。
41.如图8所示,车速与里程显示模块1
‑
4包括光电传感器u8,检测比较器u7,第四十二电容c42,第十一电阻rs11,第十二电阻rs12,第十三电阻rs13,第十四电阻rs14和第十五电阻rs15。光电传感器u8的型号为itr9702;检测比较器u7的型号为lm393f。光电传感器u8的1引脚与第十一电阻rs11的一端相连,第十一电阻rs11的另一端和第十二电阻rs12的一端均接电源供电模块的3.3v供电输出端。光电传感器u8的2、4引脚和第十五电阻r15的一端均接地。光电传感器u8的3引脚、lm393f检测比较器u7的2引脚和第十三电阻rs13的一端相连,第十三电阻rs13的另一端接电源供电模块的3.3v供电输出端。lm393f检测比较器u7的1脚与第四十二电容c42、第十四电阻rs14的一端以及控制器u1的59引脚相连。lm393f检测比较器u7的3引脚与第十二电阻rs12、第十五电阻rs15的另一端相连。lm393f检测比较器u7的5引脚与第十四电阻rs14的另一端相连均接电源供电模块的3.3v供电输出端。lm393f检测比较器u7的4引脚与第四十二电容c42的另一端均接地。
42.如图9所示,电感循迹模块1
‑
2包括电磁传感器u2、第三电阻rs3、第四电阻rs4、第六电容c6、第七电容c7、第八电容c8、第九电容c9、第十电容c10、第十一电容c11、第十二电容c12、第十三电容c13、第十四电容c14、第十五电容c15、第十六电容c16、第十七电容c17、第十八电容c18、第十九电容c19、第二十电容c20、第二十一电容c21、第二十二电容c22、第二十三电容c23、第二十四电容c24、第二十五电容c25、第二十六电容c26和第二十七电容c27。电磁传感器u2的型号为ldc1314。电磁传感器u2的3、8、17引脚相连均接地。电磁传感器u2的1引脚与第四电阻rs4一端、控制器u1的69引脚相连。电磁传感器u2的2引脚与第三电阻rs3一端、控制器u1的69引脚相连。第四电阻rs4另一端与第三电阻rs3另一端相连均接电源供电模块的3.3v供电输出端。电磁传感器u2的7引脚与第六电容c6、第七电容c7一端相连均接电源供电模块的3.3v供电输出端。第六电容c6、第七电容c7另一端相连均接地。电磁传感器u2的4、5、6引脚与控制器u1的29、44、45引脚分别相连。电磁传感器u2的9引脚与第一组电感极片的b端、第九电容c9、第十电容c10、第十二电容c12的一端相连。电磁传感器u2的10引脚与第一组电感极片的a端、第十二电容c12的另一端、第八电容c8、第十一电容c11的一端相连。第八电容c8、第十一电容c11的另一端与第九电容c9、第十电容c10的另一端相连均接地。电磁传感器u2的11引脚与第二组电感极片的b端、第十四电容c14、第十五电容c15、第十六电容c16的一端相连。电磁传感器u2的12引脚与第一组电感极片的a端、第十六电容c16的另一端、第十三电容c13、第十七电容c17的一端相连。第十三电容c13、第十七电容c17的另一端与第十四电容c14、第十五电容c15的另一端相连均接地。电磁传感器u2的13引脚与第四组电感极片的b端、第十九电容c19、第二十一电容c21、第二十二电容c22的一端相连。电磁传感器u2的14引脚与第四组电感极片的a端、第二十二电容c22的另一端、第十八电容c18、第二十电容c20的一端相连。第十八电容c18、第二十电容c20的另一端与第十九电容c19、第二十一电容c21的另一端相连均接地。电磁传感器u2的15引脚与第三组电感极片的b端、第二十四电容c24、第二十六电容c26、第二十七电容c27的一端相连。电磁传感器u2的16
引脚与第三组电感极片a端、第二十七电容c27的另一端、第二十三电容c23、第二十五电容c25的一端相连。第二十三电容c23、第二十五电容c25的另一端与第二十四电容c24、第二十六电容c26的另一端相连均接地。
43.如图10所示,主控uart转usb模块1
‑
6包括第二usb接口u11,第二usb转接芯片u12,第五电阻rs5,第六电阻rs6,第七电阻rs7,第八电阻rs8,第九电阻rs9,第十电阻rs10,第一pnp型三级管q1,第二pnp型三级管q2,第一led发光二极管le1,第二十八电容c28,第二十九电容c29,第三十电容c30和第三十一电容c31。第二usb转接芯片u12的型号为ch340g。第二usb接口u11的1引脚、第二十八电容c28和第二十九电容c29的一端均接电源供电模块的5v供电输出端。第二usb接口u11的4引脚、第二十八电容c28和第二十九电容c29的另一端均接地。第二usb接口u11的2引脚与第五电阻rs5一端相连;第五电阻rs5的另一端与第二usb转接芯片u12的6引脚相连。第二usb接口u11的3引脚与第六电阻rs6的一端相连,第六电阻rs6的另一端与第二usb转接芯片u12的5引脚相连。第二usb转接芯片u12的1引脚接地,16引脚接电源供电模块的5v供电输出端。第二usb转接芯片u12的2引脚与控制器u1的102引脚相连,3引脚与控制器u1的101引脚相连。第二usb转接芯片u12的4引脚与第三十一电容c31的一端相连,第三十一电容c31的另一端接地。第三十电容c30的一端接电源供电模块的5v供电输出端,另一端接地。第二usb转接芯片u12的14引脚与第一三级管q1基极相连,13引脚与第一三级管q1发射极相连。第一三级管q1集电极与第八电阻rs8一端相连,第八电阻rs8另一端、第九电阻rs9的一端和第二三极管q2的基极相连。第九电阻rs9的另一端、第一发光二极管le1的一端相连均接地。第十电阻rs10的一端、第一发光二极管le1的另一端相连均接电源供电模块的5v供电输出端。第十电阻rs10的另一端与第二三极管q2的发射极相邻。第二三极管q2集电极接电源供电模块的5v供电输出端。
44.如图11所示,电源供电模块包括第一稳压芯片u6、第二稳压芯片u5、第三稳压芯片u4、第二开关sw2、第十六电阻rs16、第四电阻re4、第一二极管d1、第二发光二极管le2、第三发光二极管le3、第三十二电容c32、第三十三电容c33、第三十四电容c34、第三十五电容c35、第三十六电容c36、第三十七电容c37、第三十八电容c38、第三十九电容c39、第四十电容c40、第四十一电容c41、第一电感l1和12v供电电源输入接口u13。第一稳压芯片u6的型号为lm2596;第二稳压芯片u5的型号为ams1117,第三稳压芯片u4的型号为7806。第一稳压芯片u6的1引脚与第四十一电容c41、第二开关sw2一端相相连,第二开关sw2另一端与外部输入12v电压相连;第一稳压芯片u6的3、5、6引脚均接地。第一稳压芯片u6的2引脚与第一二极管d1、第一电感l1一端相连。第一稳压芯片u6的4引脚与第四十电容c40、第十六电阻rs16的一端、第一电感l1的另一端相连,作为电源供电模块的5v供电输出端。第十六电阻rs16的另一端与第三发光二极管le3的一端相连;第三发光二极管le3、第四十电容c40、第一二极管d1的另一端相连均接地。第二稳压芯片u5的1引脚、第三十六电容c36、第三十七电容c37、第三十八电容c38及第三十九电容c39的一端均接地。第二稳压芯片u5的3引脚与第三十六电容c36、第三十七电容c37的另一端相连均接电源供电模块的5v供电输出端。第二稳压芯片u5的2引脚与第三十八电容c38、第三十九电容c39的另一端相连,作为电源供电模块的3.3v供电输出端。第三稳压芯片u4的2引脚与第三十二电容c32、第三十三电容c33、第三十四电容c34、第三十五电容c35、第二发光二极管le2一端相连均接地。第三稳压芯片u4的1引脚与第三十二电容c32、第三十三电容c33的另一端相连均接外部输入12v电压。第四电阻re4的
一端与第二发光二极管le2的另一端相连。第三稳压芯片u43引脚与第三十四电容c34、第三十五电容c35、第四电阻re4的另一端相连,作为,电源供电模块的6v供电输出端。
45.本实用新型工作原理如下:
46.小车在铺设金属丝的轨道上行驶,并排设置的四个ldc1314电磁感应传感器检测电路根据金属丝在磁场中信号的变化,将电磁感应信息传输给控制模块1
‑
1,编码器测速测距模块1
‑
3检测小车行驶过程中的速度和里程传输给控制模块1
‑
1。树莓派图像控制核心2
‑
1控制舵机驱动模块2
‑
3实现摄像头上下与左右转动,帮助摄像头模块2
‑
2准确获取小车行驶道路路况图像信息实时传输给树莓派图像控制核心2
‑
1进行处理,树莓派控制核心通过串行通信将道路路况信息传输给控制模块1
‑
1。控制模块1
‑
1根据获得的电磁感应数据以及路况图像数据信息综合研判,利用电机驱动电路通过控制电机车速实现小车在复杂路况下自主行驶,小车行驶过程中的速度和里程信息通过液晶显示屏u3实时显示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

