1.本实用新型涉及钢结构卸载技术领域,尤其涉及一种钢结构智能卸载系统。
背景技术:
2.在钢结构工程建设中,采用整体吊装、整体提升、滑移等方案,在整体结构没有形成稳定框架时临时使用塔架或钢柱作为支撑,将构件或结构体固定,在完成安装与接口焊接工作、结构完成整体受力时,将临时支撑拆除的过程叫做钢结构的卸载。
3.目前,在钢结构卸载过程中,普遍采用分级切割支撑胎架卸载或液压卸载,并在卸载过程中采用全站仪、应变片等设备进行位移和应力监测,由于各监测项目是相互独立并且需要由检测人员进行监测数据的分析,工作量较大,特别是在大体量的钢结构卸载过程中,数据量巨大,其处理及分析费时费力,且安全风险巨大。
4.可见,现有技术通过检测人员进行监测数据的分析,不仅会存在费时费力,还会数据分析误差导致出现钢结构卸载的安全隐患。
技术实现要素:
5.针对现有技术中所存在的不足,本实用新型的提供的一种钢结构智能卸载系统,其解决了人工对监测数据分析带来的工作量大和分析误差的问题,可降低钢结构卸载过程中数据收集及分析的工作量,能实时掌握钢结构卸载过程中的全部变化过程,使钢结构卸载过程智能、高效、快捷、安全。
6.本实用新型提供一种钢结构智能卸载系统,所述卸载系统包括:数据采集模块、微控制器、控制电路、卸载工装和电源模块;所述数据采集模块用于实时采集预设监测点的当前卸载状态数据;所述微控制器与所述数据采集模块相连,用于将所述当前卸载状态数据与预设状态数据进行分析比较,还用于根据比较结果输出相应的控制信号;所述控制电路与所述微控制器相连,还与所述卸载工装相连,用于根据所述控制信号,控制所述卸载工装的启动和关闭;所述卸载工装用于对钢结构进行卸载;所述电源模块与所述数据采集模块、所述微控制器、所述控制电路和所述卸载工装相连,用于所述数据采集模块、所述微控制器、所述控制电路和所述卸载工装提供相匹配的电能。
7.可选地,所述数据采集模块包括:位移传感器,用于采集所述预设监测点的三维坐标数据;应力传感器,用于采集所述预设监测点的应力数据;角度传感器,用于采集所述预设监测点的旋转角度数据。
8.可选地,所述卸载工装包括:驱动电机、电动螺杆、液压马达、传动轴和伸缩管;所述驱动电机通过所述控制电路与所述电源模块相连,所述驱动电机还与所述电动螺杆电连接,在所述电动螺杆的顶端设置有所述液压马达,所述液压马达的顶端设置有所述传动轴,所述传动轴的顶端设置有所述伸缩管,所述液压马达与所述伸缩管通过所述传动轴控制连接。
9.可选地,在所述伸缩管的侧面设置有多个斜撑杆,所述斜撑杆的底部设置有加强
筋。
10.可选地,所述电源模块包括:交流电源,用于为所述系统提供第一交流电;变压器,所述变压器的输入端与所述交流电源的输出端相连,用于降低所述第一交流电的电压,得到第二交流电;整流电路,所述整流电路的输入端与所述变压器的输出端相连,用于对所述第二交流电进行整流,得到第一直流电;稳压电路,所述稳压电路的输入端与所述整流电路的输出端相连,用于将所述第一直流电进行稳压和降压,得到第二直流电。
11.可选地,所述整流电路包括:第一二极管,所述第一二极管的阴极与所述变压器的第一输出端相连,所述第一二极管的阳极接地;第二二极管,所述第二二极管的阳极与所述第一二极管的阳极相连,所述第二二极管的阴极与所述变压器的第二输出端相连;第三二极管,所述第三二极管的阳极与所述第二二极管的阴极相连,所述第三二极管的阴极与所述稳压电路的输入端相连;第四二极管,所述第四二极管的阳极与所述第一二极管的阴极相连,所述第四二极管的阴极与所述第三二极管的阴极相连。
12.可选地,所述控制电路包括:放大器、光电耦合器、反相器和双向晶闸管;所述放大器的正相输入端与所述微控制器的输出端相连,所述放大器的反相输入端接地;所述光电耦合器的第一输入端与所述放大器的输出端相连,所述光电耦合器的第一输出端与所述反相器的输入端相连;所述双向晶闸管的第一主电极与所述卸载工装的驱动电机相连,所述双向晶闸管的第二主电极与所述交流电源相连,所述双向晶闸管的控制极与所述反相器的输出端相连。
13.可选地,所述控制电路还包括:第一电阻,所述第一电阻的第一端与所述放大器的反相输入端相连,所述第一电阻的第二端接地;第二电阻,所述第二电阻的第一端与所述放大器的输出端相连,所述第二电阻的第二端与所述光电耦合器的第一输入端相连;第三电阻,所述第三电阻的第一端与所述光电耦合器的第二输出端相连。
14.可选地,所述控制电路还包括:第四电阻,所述第四电阻的第一端与所述第三电阻的第二端相连,所述第四电阻的第二端与所述双向晶闸管的第一主电极相连;滤波电容,所述滤波电容的第一端与所述第四电阻的第一端相连,所述滤波电容的第二端与所述双向晶闸管的控制极相连。
15.可选地,所述系统还包括:预警模块,与所述微控制器相连,用于接收所述微控制器发出的异常指令,还用于根据所述异常指令进行声光报警;显示装置,与所述数据采集模块和所述微控制器相连,用于对所述数据采集模块和所述微控制器输出的数据进行图表展示。
16.相比于现有技术,本实用新型具有如下有益效果:
17.本实用新型通过微控制器对数据采集模块实时采集到的卸载状态数据进行分析和处理,使控制电路根据微控制器的分析结果自动控制卸载工装的启动和关闭,解决了人工对监测数据分析带来的工作量大和分析误差的问题,可降低钢结构卸载过程中数据收集及分析的工作量,能实时掌握钢结构卸载过程中的全部变化过程,使钢结构卸载过程智能、高效、快捷、安全。
附图说明
18.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的
实施例,并与说明书一起用于解释本实用新型的原理。
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
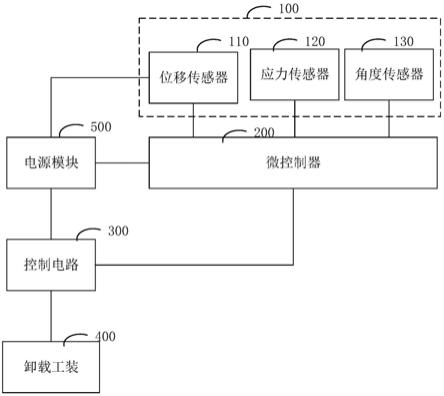
20.图1所示为本实用新型实施例提供的一种钢结构智能卸载系统的结构示意图;
21.图2所示为本实用新型实施例提供的一种卸载工装的结构示意图;
22.图3所示为本实用新型实施例提供的一种电源模块的电路示意图;
23.图4所示为本实用新型实施例提供的一种控制电路的电路示意图;
24.图5所示为本实用新型实施例提供的另一种钢结构智能卸载系统的结构示意图。
具体实施方式
25.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。本实用新型实例中相同标号的功能单元具有相同和相似的结构和功能。
26.实施例一
27.图1所示为本实用新型实施例提供的一种钢结构智能卸载系统的结构示意图,如图1所示,本实施例提供的钢结构智能卸载系统具体包括:
28.数据采集模块100、微控制器200、控制电路300、卸载工装400和电源模块500;
29.所述数据采集模块100用于实时采集预设监测点的当前卸载状态数据;
30.所述微控制器200与所述数据采集模块100相连,用于将所述当前卸载状态数据与预设状态数据进行分析比较,还用于根据比较结果输出相应的控制信号;
31.所述控制电路300与所述微控制器200相连,还与所述卸载工装400相连,用于根据所述控制信号,控制所述卸载工装400的启动和关闭;
32.所述卸载工装400用于对钢结构进行卸载;
33.所述电源模块500与所述数据采集模块100、所述微控制器200、所述控制电路300和所述卸载工装400相连,用于所述数据采集模块100、所述微控制器200、所述控制电路300和所述卸载工装400提供相匹配的电能。
34.需要说明的是,在本实用新型的实施例中,在对钢结构进行卸载前需要通过模拟软件对当前的刚结构进行模拟卸载,得到每个卸载步骤中每个监测点的多个模拟参数,并且将所述多个模拟参数存储到微控制器200中;所述预设监测点的当前卸载状态数据包括但不限于分步卸载中监测点的三维坐标数据、分步卸载中杆件的应力数据和卸载过程中杆件的旋转角度数据,所述数据采集模块包括但不限于:位移传感器110,用于采集所述预设监测点的三维坐标数据;应力传感器120,用于采集所述预设监测点的应力数据;角度传感器130,用于采集所述预设监测点的旋转角度数据;其中,所述微控制器200的功能可依赖现有技术的计算机程序实现,或者所述微控制器200为执行现有技术程序的单片机。
35.在进行实际卸载过程中,通过数据采集模块100实时采集多个预设监测点的当前卸载状态数据,通过微控制器200将所述当前卸载状态数据与预设的模拟参数进行比较,若
当前卸载状态数据与当前的模拟参数不相匹配时,发送第一控制信号到所述控制电路300,使所述控制电路300自动关闭所述卸载工装,停止当前的卸载操作,直到当前卸载状态数据与相应的模拟参数相匹配为止才启动卸载工装400;若当前卸载状态数据与当前的模拟参数相匹配时,发送第二控制信号到所述控制电路300,使所述控制电路300控制所述卸载工装400继续进行卸载。
36.相比于现有技术,本实用新型具有如下有益效果:
37.本实用新型通过微控制器对数据采集模块实时采集到的卸载状态数据进行分析和处理,使控制电路根据微控制器的分析结果自动控制卸载工装的启动和关闭,解决了人工对监测数据分析带来的工作量大和分析误差的问题,可降低钢结构卸载过程中数据收集及分析的工作量,能实时掌握钢结构卸载过程中的全部变化过程,使钢结构卸载过程智能、高效、快捷、安全。
38.实施例二
39.图2所示为本实用新型实施例提供的一种卸载工装的结构示意图,如图2所示,本实施例提供的卸载工装400具体包括:
40.驱动电机、电动螺杆升降机、液压马达420、传动轴430、伸缩管440和支撑柱441;
41.其中,在所述伸缩管440为中空管状结构且其内部具有内螺纹,所述伸缩管440的侧面设置有多个斜撑杆450且斜撑杆450的底端长于所述伸缩管440,用以通过多个斜撑杆450支撑在地面,所述斜撑杆450的底部设置有加强筋460,所述支撑柱441螺纹连接于伸缩管440的内部且所述支撑柱441的下端一体式固定连接有花键套;所述驱动电机通过所述控制电路300与所述电源模块500相连,所述驱动电机的输出端与所述电动螺杆升降机连接用以驱动所述电动螺杆升降机的升降平台410进行升降,在所述电动螺杆升降机的升降平台410顶端设置有所述液压马达420,所述液压马达420的输出端设置有所述传动轴430,所述传动轴430的顶端设置有与所述花键套配合的花键槽。
42.需要说明的是,在本实施例中当需要使用该卸载工装时,所述伸缩管440为悬空状态且通过多个斜撑杆450支撑在地面,通过控制电路来控制驱动电机,驱动电机带动电动螺杆升降机的升降平台410、液压马达420和传动轴430一并上升,当传动轴430上升到与支撑柱441实现花键配合的位置时,再通过控制电路控制液压马达420启动,液压马达420通过传动轴430带动支撑柱441转动并沿伸缩管440中心轴向上延伸直至与钢结构高度一致,此时支撑柱441可替代钢结构实现对建筑结构的支撑,即可开始对钢结构进行卸载操作,另外伸缩管440的两侧均设有斜撑杆450来支撑,所在斜撑杆450的底部设有加强筋460来固定,用以增大斜撑杆450底部的受力面积,以避免斜撑杆450陷入地面。
43.实施例三
44.图3所示为本实用新型实施例提供的一种电源模块的电路示意图;如图3所示,所述电源模块600包括:交流电源,用于为所述系统提供第一交流电;变压器,所述变压器的输入端与所述交流电源的输出端相连,用于降低所述第一交流电的电压,得到第二交流电;整流电路,所述整流电路的输入端与所述变压器的输出端相连,用于对所述第二交流电进行整流,得到第一直流电;稳压电路,所述稳压电路的输入端与所述整流电路的输出端相连,用于将所述第一直流电进行稳压和降压,得到第二直流电。
45.在本实施例中,所述整流电路包括:第一二极管,所述第一二极管的阴极与所述变
压器的第一输出端相连,所述第一二极管的阳极接地;第二二极管,所述第二二极管的阳极与所述第一二极管的阳极相连,所述第二二极管的阴极与所述变压器的第二输出端相连;第三二极管,所述第三二极管的阳极与所述第二二极管的阴极相连,所述第三二极管的阴极与所述稳压电路的输入端相连;第四二极管,所述第四二极管的阳极与所述第一二极管的阴极相连,所述第四二极管的阴极与所述第三二极管的阴极相连。
46.在本实施例中,所述电源模块还包括:滤波电路,所述滤波电路与所述稳压电路相连,用于对所述稳压电路的输入信号和输出信号进行滤波。
47.其中,所述滤波电路包括:第一电容,所述第一电容的第一端与所述稳压电路的输入端相连,所述第一电容的第二端接地;第二电容,所述第二电容的第一端与所述稳压电路的输出端相连,所述第二电容的第二端接地;第三电容,所述第三电容的第一端与所述第二电容的第一端相连,所述第三电容的第二端接地。
48.实施例四
49.图4所示为本实用新型实施例提供的一种控制电路的电路示意图;如图4所示,所述控制电路包括:放大器、光电耦合器ic1、反相器和双向晶闸管q1;所述放大器的正相输入端与所述微控制器的输出端相连,所述放大器的反相输入端接地;所述光电耦合器ic1的第一输入端与所述放大器的输出端相连,所述光电耦合器ic1的第一输出端与所述反相器的输入端相连;所述双向晶闸管q1的第一主电极与所述卸载工装的驱动电机m相连,所述双向晶闸管q1的第二主电极与所述交流电源相连,所述双向晶闸管q1的控制极与所述反相器的输出端相连。
50.在本实施例中,所述控制电路还包括:第一电阻r1,所述第一电阻r1的第一端与所述放大器的反相输入端相连,所述第一电阻r1的第二端接地;第二电阻r2,所述第二电阻r2的第一端与所述放大器的输出端相连,所述第二电阻r2的第二端与所述光电耦合器ic1的第一输入端1相连;第三电阻r3,所述第三电阻r3的第一端与所述光电耦合器ic1的第二输出端相连;第四电阻r4,所述第四电阻r4的第一端与所述第三电阻r3的第二端相连,所述第四电阻r4的第二端与所述双向晶闸管q1的第一主电极相连;滤波电容c,所述滤波电容c的第一端与所述第四电阻r4的第一端相连,所述滤波电容c的第二端与所述双向晶闸管q1的控制极相连。
51.结合图3和图4可知,在本实施例提供的电源模块和控制电路工作原理为:本系统接入220v交流电,220v交流电分两路运行,一路通过双向晶闸管q1连接卸载工装的驱动电机m,另一路通过变压器t1、整流电路、滤波电路和稳压电路u1后变成9v稳定的直流电供给数据采集模块、微控制器和控制电路。
52.当数据采集模块采集到的当前卸载状态数据与预设的模拟状态数据不相匹配时,微控制器发送高电平控制信号到所述放大电路中,放大器的3引脚输出放大后的高电平信号,驱动光耦合器ic1,光耦合器ic1的4引脚输出高电平信号到反相器的1引脚,反相器ic1输出低电平信号到双向晶闸管q1的控制极,双向晶闸管q1处于截止状态,断开驱动电机与交流电源的连接,从而使卸载工装停止工作;当数据采集模块采集到的当前卸载状态数据与预设的模拟状态数据相匹配时,微控制器发送低电平控制信号到所述放大电路中,放大器的3引脚输出放大后的低电平信号,驱动光耦合器ic1,光耦合器ic1的4引脚输出低电平信号到反相器的1引脚,反相器ic1输出高电平信号到双向晶闸管q1的控制极,双向晶闸管
q1处于导通状态,接通驱动电机与交流电源的连接,从而使卸载工装继续工作。
53.实施例五
54.图5所示为本实用新型实施例提供的另一种钢结构智能卸载系统的结构示意图,本实施例中的钢结构智能卸载系统包括:
55.数据收集模块:数据收集模块由位移传感器、应力传感器、角度传感器等组成,位移传感器负责收集卸载过程中监测点位的三维坐标变动,应力传感器负责收集卸载过程中杆件的应力变化,角度传感器负责收集卸载过程中杆件(与轴承连接处的杆件)的转动情况。
56.数据传输模块:数据传输模块包含无线数据传输和无线数据接受两部分,无线数据传输负责将数据收集模块收集到的数据或控制模块发出的控制指令传输至处理中心或控制模块,无线数据接受则负责上述数据或指令的接收。
57.数据处理模块:数据处理模块包含卸载模拟软件模拟数据导入模块、监测点位数据与模拟点位数据对比分析模块两部分,数据导入模块负责将常用钢结构分析软件中分析的卸载过程中各监测点位位移及应变数据等导入至处理模块,并由分析模块对收集的监测数据与软件模拟数据进行比对分析。
58.控制模块:根据分析结果由控制系统按照预先设定的数据发出下一步卸载控制指令,控制液压等装置动作,其动力由传动装置提供。
59.预警模块:在卸载过程中若发生位移、应力、角度等监测数据异常,立即发出预警指示,查明原因后继续卸载。
60.展示模块:通过图表等形式,将卸载过程中的数据变化集中展示,卸载系统可接入网络,方便远程查看卸载过程。
61.需要说明的是,图5的附图说明为:1、数据收集模块,1.1、位移传感器,1.2、应力传感器,1.3、角度传感器,2、数据传输模块,3、数据处理模块,4、控制模块,4.1、控制模块,4.2、传动模块,5.预警模块,6.展示模块。
62.需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
63.以上所述仅是本实用新型的具体实施方式,使本领域技术人员能够理解或实现本实用新型。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

