1.本实用新型涉及聚氨酯管整形控制技术领域,尤其是一种数字化规圆机构电路。
背景技术:
2.聚氨酯保温管外圈的聚氨酯外套管,直径较大,强度较差,长时间摆放容易引起很大的变形,且直径越大,变形也大,应力大,对钢管套入带来了很大的麻烦,耗时耗力,因而需要整形规圆机构来解决这一问题;专利号201922230338.7,提出了一种聚氨酯管变形数控整形规圆机,其包括机架、归圆盘、归圆千斤顶组件,在机架上固定安装归圆盘,在归圆盘的四周均布间隔安装归圆千斤顶组件,该归圆千斤顶组件包括基座、伺服电机、蜗轮蜗杆驱动机构、丝杆及抓钩,基座固定安装于归圆盘外周,基座上安装蜗轮蜗杆机构,蜗杆由伺服电机驱动,蜗轮外部与蜗杆啮合传动,蜗轮内部与丝杆啮合传动;各归圆千斤顶组件的丝杆均伸至归圆盘中心,在丝杆朝向归圆盘中心的一端固定安装抓钩,但上述整形规圆机虽然在机械上实现了整形规圆功能,但是无法数字化自动与手动控制。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种数字化规圆机构电路。
4.本实用新型解决其技术问题是采取以下技术方案实现的:
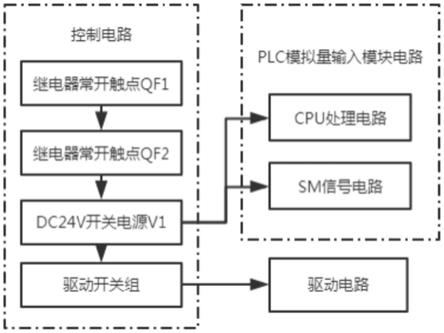
5.一种数字化规圆机构电路,包括控制电路及分别与所述控制电路连接的plc模拟量输入模块电路及驱动电路,所述plc模拟量输入模块电路采集所述一种数字化规圆机构电路反馈的模拟量并输入至所述控制电路,所述控制电路对采集的模拟量进行分析,并通过控制所述驱动电路驱动数字化规圆机构的工作。
6.优选的,所述控制电路包括依次连接的继电器常开触点qf1、继电器常开触点qf2及dc24v开关电源v1;供电电源连接所述继电器常开触点qf1的输入端。
7.优选的,所述驱动电路包括与所述控制电路连接的多个结构相同的伺服驱动电路。
8.优选的,所述控制电路还包括驱动开关组,所述继电器常开触点qf1的输出端连接所述驱动开关组;所述驱动开关组的输出端连接所述伺服驱动电路的输入端。
9.优选的,所述plc模拟量输入模块电路包括分别与所述dc24v开关电源v1连接的cpu处理电路及sm信号电路。
10.优选的,所述cpu处理电路包括处理芯片及与所述处理芯片连接的处理开关电路。
11.优选的,所述sm信号电路包括信号芯片一、信号芯片二。
12.优选的,还包括一总控制台,所述总控制台包括处理开关电路中的开关。
13.优选的,还包括指示电路,所述指示电路包括与所述继电器常开触点qf1连接的指示灯h1。
14.优选的,所述sm信号电路还包括与所述信号芯片一连接的处理开关组。
15.本实用新型的优点和积极效果是:
16.1.本实用新型一种数字化规圆机构电路,包括控制电路及分别与所述控制电路连接的plc模拟量输入模块电路及驱动电路,所述plc模拟量输入模块电路采集所述一种数字化规圆机构电路反馈的模拟量并输入至所述控制电路,所述控制电路对采集的模拟量进行分析,并通过控制所述驱动电路驱动数字化规圆机构的工作,成本较低,控制容易并且方便。
17.2.本实用新型一种数字化规圆机构电路,通过控制电路中的各个继电器的开闭状态以及plc模拟量输入模块电路的开关对规圆机构进行控制,通过设置了手动模式和自动模式,使规圆机构能够根据使用的需求自动进行工作,解放了人力,同时节约了生产的费用,相较于传统使用人工的规圆机构,本实用新型能够调节的参数更多,能够更加精确的完成工作,误差更小。
附图说明
18.图1为本实用新型的电路连接框图;
19.图2为本实用新型的控制电路和驱动电路连接图;
20.图3为本实用新型的伺服驱动电路连接图;
21.图4是本实用新型的cpu处理电路连接图;
22.图5是本实用新型的sm信号电路连接图;
23.图6是本实用新型的总控制台示意图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.如图1
‑
6所示,本实用新型所述一种数字化规圆机构电路,包括控制电路及分别与所述控制电路连接的plc模拟量输入模块电路及驱动电路,所述plc模拟量输入模块电路采集所述一种数字化规圆机构电路反馈的模拟量并输入至所述控制电路,所述控制电路对采集的模拟量进行分析,并通过控制所述驱动电路驱动数字化规圆机构的工作。
28.进一步地,所述控制电路包括依次连接的继电器常开触点qf1、继电器常开触点qf2及dc24v开关电源v1;供电电源连接所述继电器常开触点qf1的输入端;具体的,所述供
电电源通过继电器常开触点qf1接入控制电路,接入的r线连接所述dc24v开关电源v1的正极输入端,接入的n线连接所述dc24v开关电源v1的负极输入端,所述dc24v开关电源v1接地端接地,所述dc24v开关电源v1输出正极输出24v电源,所述dc24v开关电源v1输出负极输出0v电源。
29.进一步地,还包括指示电路,所述指示电路包括与所述继电器常开触点qf1连接的指示灯h1。
30.进一步地,所述控制电路还包括驱动开关组,所述继电器常开触点qf1的输出端连接所述驱动开关组;所述驱动开关组的输出端连接所述伺服驱动电路的输入端;
31.具体的,所述驱动开关组包括继电器常开触点qf3、继电器常开触点qf4、继电器常开触点qf5、继电器常开触点qf6、继电器常开触点qf7、继电器常开触点qf8、继电器常开触点qf9、继电器常开触点qf10、继电器常开触点qf11、继电器常开触点qf12、继电器常开触点qf13、继电器常开触点qf14;接入的r线、s线和t线分别通过所述继电器常开触点qf3、所述继电器常开触点qf4、所述继电器常开触点qf5、所述继电器常开触点qf6、所述继电器常开触点qf7、所述继电器常开触点qf8、所述继电器常开触点qf9、所述继电器常开触点qf10、所述继电器常开触点qf11、所述继电器常开触点qf12、所述继电器常开触点qf13和所述继电器常开触点qf14接入所述伺服驱动电路相对应的驱动器。
32.进一步地,所述驱动电路包括与所述控制电路连接的多个结构相同的伺服驱动电路;具体的,所述驱动电路包括伺服驱动电路一、伺服驱动电路二、伺服驱动电路三、伺服驱动电路四、伺服驱动电路五、伺服驱动电路六、伺服驱动电路器七、伺服驱动电路八、伺服驱动电路九、伺服驱动电路十、伺服驱动电路十一及伺服驱动电路十二;
33.进一步地,所述伺服驱动电路一包括伺服驱动器u1及与所述伺服驱动器u1连接的电机m1,r线、s线和t线分别通过所述继电器常开触点qf3连接所述伺服驱动器u1的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u1的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u1的m电源输入端,所述伺服驱动器u1的输出端u、输出端v和输出端w分别连接所述电机m1的输入端u、输入端v和输入端w,所述伺服驱动器u1的输出端pe连接所述电机m1的输入端pe,伺服驱动器u1的输出端x9连接电机m1的电机编码器输入端。
34.进一步地,所述伺服驱动电路二包括伺服驱动器u2及与所述伺服驱动器u2连接的电机m2,r线、s线和t线分别通过所述继电器常开触点qf4连接所述伺服驱动器u2的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u2的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u2的m电源输入端,所述伺服驱动器u2的输出端u、输出端v和输出端w分别连接所述电机m2的输入端u、输入端v和输入端w,所述伺服驱动器u2的输出端pe连接所述电机m2的输入端pe,伺服驱动器u2的输出端x9连接电机m2的电机编码器输入端。
35.进一步地,所述伺服驱动电路三包括伺服驱动器u3及与所述伺服驱动器u3连接的电机m3,r线、s线和t线分别通过所述继电器常开触点qf5连接所述伺服驱动器u3的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u3的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u3的m电源输入端,所述伺服驱动器u3的输出端u、输出端v和输出端w分别连接所述电机m3的输入端u、输入端v和输入端w,
所述伺服驱动器u3的输出端pe连接所述电机m3的输入端pe,伺服驱动器u3的输出端x9连接电机m3的电机编码器输入端。
36.进一步地,所述伺服驱动电路四包括伺服驱动器u4及与所述伺服驱动器u4连接的电机m4,r线、s线和t线分别通过所述继电器常开触点qf6连接所述伺服驱动器u4的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u4的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u4的m电源输入端,所述伺服驱动器u4的输出端u、输出端v和输出端w分别连接所述电机m4的输入端u、输入端v和输入端w,所述伺服驱动器u4的输出端pe连接所述电机m4的输入端pe,伺服驱动器u4的输出端x9连接电机m4的电机编码器输入端。
37.进一步地,所述伺服驱动电路五包括伺服驱动器u5及与所述伺服驱动器u5连接的电机m5,r线、s线和t线分别通过所述继电器常开触点qf7连接所述伺服驱动器u5的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u5的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u5的m电源输入端,所述伺服驱动器u5的输出端u、输出端v和输出端w分别连接所述电机m5的输入端u、输入端v和输入端w,所述伺服驱动器u5的输出端pe连接所述电机m5的输入端pe,伺服驱动器u5的输出端x9连接电机m5的电机编码器输入端。
38.进一步地,所述伺服驱动电路六包括伺服驱动器u6及与所述伺服驱动器u6连接的电机m6,r线、s线和t线分别通过所述继电器常开触点qf8连接所述伺服驱动器u6的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u6的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u6的m电源输入端,所述伺服驱动器u6的输出端u、输出端v和输出端w分别连接所述电机m6的输入端u、输入端v和输入端w,所述伺服驱动器u6的输出端pe连接所述电机m6的输入端pe,伺服驱动器u6的输出端x9连接电机m6的电机编码器输入端。
39.进一步地,所述伺服驱动电路七包括伺服驱动器u7及与所述伺服驱动器u7连接的电机m7,r线、s线和t线分别通过所述继电器常开触点qf9连接所述伺服驱动器u7的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u7的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u7的m电源输入端,所述伺服驱动器u7的输出端u、输出端v和输出端w分别连接所述电机m7的输入端u、输入端v和输入端w,所述伺服驱动器u7的输出端pe连接所述电机m7的输入端pe,伺服驱动器u7的输出端x9连接电机m7的电机编码器输入端。
40.进一步地,所述伺服驱动电路八包括伺服驱动器u8及与所述伺服驱动器u8连接的电机m8,r线、s线和t线分别通过所述继电器常开触点qf10连接所述伺服驱动器u8的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u8的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u8的m电源输入端,所述伺服驱动器u8的输出端u、输出端v和输出端w分别连接所述电机m8的输入端u、输入端v和输入端w,所述伺服驱动器u8的输出端pe连接所述电机m8的输入端pe,伺服驱动器u8的输出端x9连接电机m8的电机编码器输入端。
41.进一步地,所述伺服驱动电路九包括伺服驱动器u9及与所述伺服驱动器u9连接的电机m9,r线、s线和t线分别通过所述继电器常开触点qf11连接所述伺服驱动器u9的输入端
l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u9的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u9的m电源输入端,所述伺服驱动器u9的输出端u、输出端v和输出端w分别连接所述电机m9的输入端u、输入端v和输入端w,所述伺服驱动器u9的输出端pe连接所述电机m9的输入端pe,伺服驱动器u9的输出端x9连接电机m9的电机编码器输入端。
42.进一步地,所述伺服驱动电路十包括伺服驱动器u10及与所述伺服驱动器u10连接的电机m10,r线、s线和t线分别通过所述继电器常开触点qf12连接所述伺服驱动器u10的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u10的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u10的m电源输入端,所述伺服驱动器u10的输出端u、输出端v和输出端w分别连接所述电机m10的输入端u、输入端v和输入端w,所述伺服驱动器u10的输出端pe连接所述电机m10的输入端pe,伺服驱动器u10的输出端x9连接电机m10的电机编码器输入端。
43.进一步地,所述伺服驱动电路十一包括伺服驱动器u11及与所述伺服驱动器u11连接的电机m11,r线、s线和t线分别通过所述继电器常开触点qf13连接所述伺服驱动器u11的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u11的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u11的m电源输入端,所述伺服驱动器u11的输出端u、输出端v和输出端w分别连接所述电机m11的输入端u、输入端v和输入端w,所述伺服驱动器u11的输出端pe连接所述电机m11的输入端pe,伺服驱动器u11的输出端x9连接电机m11的电机编码器输入端。
44.进一步地,所述伺服驱动电路十二包括伺服驱动器u12及与所述伺服驱动器u12连接的电机m12,r线、s线和t线分别通过所述继电器常开触点qf14连接所述伺服驱动器u12的输入端l1、输入端l2和输入端l3,所述dc24v开关电源v1输出正极连接伺服驱动器u12的24v电源输入端,所述dc24v开关电源v1输出负极连接所述伺服驱动器u12的m电源输入端,所述伺服驱动器u12的输出端u、输出端v和输出端w分别连接所述电机m12的输入端u、输入端v和输入端w,所述伺服驱动器u12的输出端pe连接所述电机m12的输入端pe,伺服驱动器u12的输出端x9连接电机m12的电机编码器输入端。
45.进一步地,所述plc模拟量输入模块电路包括cpu处理电路;所述dc24v开关电源v1连接所述cpu处理电路,所述cpu处理电路包括处理芯片及与所述处理芯片连接的处理开关电路;具体的,所述处理芯片型号为plc1215;所述处理开关电路包括开关s1、开关s2、开关s3、开关s4、开关s5、开关s6、开关s7、开关s8、开关s9、开关s10、开关s11、开关s12、开关s13、开关s14;
46.所述处理芯片的1m接口接地,所述dc24v开关电源v1输出正极24v电源通过所述开关s1连接所述所述处理芯片的1m0.0接口,所述24v电源通过所述开关s2连接所述处理芯片的1m0.1接口,所述24v电源通过所述开关s3连接所述处理芯片的1m0.2接口,所述24v电源通过所述开关s4连接所述处理芯片的1m0.3接口,所述24v电源通过所述开关s5连接所述处理芯片的1m0.4接口,所述24v电源通过所述开关s6连接所述处理芯片的1m0.5接口,所述24v电源通过所述开关s7连接所述处理芯片的1m0.6接口,所述24v电源通过所述开关s8连接所述处理芯片的1m0.7接口,所述24v电源通过所述开关s9连接所述处理芯片的1m1.0接口,所述24v电源通过所述开关s10连接所述处理芯片的1m1.1接口,所述24v电源通过所述
开关s11连接所述处理芯片的1m1.2接口,所述24v电源通过所述开关s12连接所述处理芯片的1m1.3接口,所述24v电源通过所述开关s13连接所述处理芯片的1m1.4接口,所述24v电源通过所述开关s14连接所述处理芯片的1m1.5接口,所述处理芯片的4l 接口连接所述dc24v开关电源v1输出正极所述24v电源,所述处理芯片的4m接口和4m0.0接口分别连接所述dc24v开关电源v1输出负极。
47.进一步地,所述plc模拟量输入模块电路还包括sm信号电路;所述dc24v开关电源v1连接所述sm信号电路;所述sm信号电路包括信号芯片一、信号芯片二及与所述信号芯片一连接的处理开关组;所述信号芯片一型号为sm1221,所述信号芯片二型号为sm1223,所述处理开关组包括开关s15、开关s16、开关s17、开关s18、开关s19、开关s20、开关s21、开关s22、开关s23、开关s24、开关s25、开关s26、开关s27、手自动模式开关sa1、急停按钮qs和运行灯h2;
48.所述处理芯片一的1m接口接地,所述24v电源通过所述开关s15连接所述处理芯片一的1m0接口,所述24v电源通过所述开关s16连接所述处理芯片一的1m1接口,所述24v电源通过所述开关s17连接所述处理芯片一的1m2接口,所述24v电源通过所述开关s18连接所述处理芯片一的1m3接口,所述处理芯片一的2m接口接地,所述24v电源通过所述开关s19连接所述处理芯片一的2m4接口,所述24v电源通过所述开关s20连接所述处理芯片一的2m5接口,所述24v电源通过所述开关s21连接所述处理芯片一的2m6接口,所述24v电源通过所述开关s22连接所述处理芯片一的2m7接口,所述处理芯片一的3m接口接地,所述24v电源通过所述开关s23连接所述处理芯片一的3m0接口,所述24v电源通过所述开关s所述24连接所述处理芯片一的3m1接口,所述24v电源通过所述开关s25连接所述处理芯片一的3m2接口,所述24v电源通过所述开关s26连接所述处理芯片一的3m3接口,所述处理芯片一的4m接口接地,所述24v电源通过所述开关s27连接所述处理芯片一的4m4接口,所述24v电源通过所述手自动模式开关sa1连接所述处理芯片一的4m5接口,所述24v电源通过所述急停按钮qs连接所述处理芯片一的4m6接口,所述24v电源连接所述处理芯片二的l 接口,所述处理芯片二的m接口接地,所述处理芯片二的接地接口接地。
49.工作原理:
50.1.判断继电器常开触点qf1、继电器常开触点qf2、继电器常开触点qf3、继电器常开触点qf4、继电器常开触点qf5、继电器常开触点qf6、继电器常开触点qf7、继电器常开触点qf8、继电器常开触点qf9、继电器常开触点qf10、继电器常开触点qf11、继电器常开触点qf12、继电器常开触点qf13和继电器常开触点qf14是否闭合,若闭合,则相应的伺服驱动器启动,否则伺服驱动器不启动;
51.2.判断手自动模式开关sa1是否是闭合,若手自动模式开关sa1是闭合的,按照使用者的操作进行工作,在伺服驱动器调速控制台上所设置的伺服驱动器三段手动速度的百分比,对伺服驱动器的速度进行控制,在总控制台的按钮操作,对规圆机构进行控制。
52.3.若手自动模式开关sa1是打开的,按照已编写好的plc梯形图自动进行工作;
53.4.出现紧急情况时,按下急停按钮qs,系统停止运行,以确保设备和人身安全。
54.本实用新型一种数字化规圆机构电路,包括控制电路及分别与所述控制电路连接的plc模拟量输入模块电路及驱动电路,所述plc模拟量输入模块电路采集所述一种数字化规圆机构电路反馈的模拟量并输入至所述控制电路,所述控制电路对采集的模拟量进行分
析,并通过控制所述驱动电路驱动数字化规圆机构的工作,成本较低,控制容易并且方便;通过控制电路中的各个继电器的开闭状态以及plc模拟量输入模块电路的开关对规圆机构进行控制,通过设置了手动模式和自动模式,使规圆机构能够根据使用的需求自动进行工作,解放了人力,同时节约了生产的费用,相较于传统使用人工的规圆机构,本实用新型能够调节的参数更多,能够更加精确的完成工作,误差更小。
55.上述说明是针对本实用新型较佳可行实施例的详细说明,但实施例并非用以限定本实用新型的专利申请范围,凡本实用新型所提示的技术精神下所完成的同等变化或修饰变更,均应属于本实用新型所涵盖专利范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

