:
1.本发明涉及坐垫服务机器人的控制领域,尤其是关于具有自主学习暂态运动时间的稳定控制方法。
背景技术:
2.交通事故及人口老龄化使步行障碍患者逐年增加,随着坐垫机器人在家庭、养老院等场所的应用,有效解决了护理人员短缺的问题。然而,在实际应用中,较长时间的暂态运动过程,机器人不断调整运动位姿,不仅影响跟踪精度,而且产生的过大轨迹误差会使机器人发生碰撞危险。因此,研究坐垫服务机器人指定暂态时间的稳定控制方法以及指定暂态运动时间的自主学习方法,对提高坐垫机器人的跟踪性和安全性具有重要意义。
3.近些年,坐垫机器人跟踪控制已有很多研究成果,然而都没有考虑指定暂态时间的稳定控制以及指定暂态时间的自主学习问题。实际上,如果暂态时间指定的不准确,将无法使暂态运动的跟踪性能达到最优,影响机器人的跟踪精度和安全性。到目前为止,还没有关于坐垫机器人具有自主学习暂态运动时间的稳定控制方法,本发明提出的指定暂态时间自主学习的稳定控制方法,对提高人机系统性能具有重要意义。
技术实现要素:
4.发明目的:
5.为了解决上述问题,提出了一种坐垫服务机器人具有自主学习暂态运动时间的稳定控制方法,目的是提高机器人的跟踪精度,保障使用者的安全。
6.技术方案:
7.本发明是通过以下技术方案来实现的:
8.一种坐垫服务机器人具有自主学习暂态运动时间的稳定控制方法,其特征在于:
9.1)利用坐垫机器人的运动学方程并加入质心偏移干扰量,通过坐标变换得到位姿误差方程,建立坐垫机器人的轨迹跟踪误差系统;
10.2)提出了一种指定暂态运动时间的稳定控制方法,使运动位姿和运动速度在指定时间同时实现稳定跟踪;
11.3)提出了暂态运动时间的自主学习方法,有效优化了机器人的暂态运动时间,提高了系统的暂态运动性能和跟踪精度。
12.步骤如下:
13.步骤1)利用坐垫机器人的运动学方程并加入质心偏移干扰量,通过坐标变换得到位姿误差方程,建立坐垫机器人的轨迹跟踪误差系统,其特征在于:系统的运动学方程描述如下
14.15.其中d表示机器人的质心与几何中心的距离;θ表示机器人运动速度与x轴之间的夹角;p=(x y θ)
t
表示实际位姿,q=(v ω)
t
表示实际速度。
16.设p
r
=(x
r y
r θ
r
)
t
表示参考位姿,q
r
=(v ω)
t
表示参考速度,p
e
=(x
e y
e θ
e
)
t
表示位姿误差。
17.根据坐标变换,坐垫机器人位姿误差方程为:
[0018][0019]
对方程(2)求导,并把(1)代入,得到坐垫机器人轨迹跟踪误差系统:
[0020][0021][0022][0023]
步骤2)提出了一种指定暂态运动时间的稳定控制方法,使运动位姿和运动速度在指定时间同时实现稳定跟踪,其特征在于:根据轨迹跟踪误差系统,设计速度和角速度控制器分别为
[0024][0025][0026]
其中速度控制器中的变量χ1=v
r cosθ
e
‑
dω
r sinθ
e
,且α2≥1,α3≥1为控制器调节参数。t
f
表示指定暂态运动时间;t0表示初始时刻。
[0027]
将角速度控制器代入式(5)可得:
[0028][0029]
设计lyapunov函数:
[0030]
v1(θ
e
)=θ
e2
ꢀꢀ
(9)
[0031]
则有
[0032][0033]
对式(9)求导得:
[0034][0035]
令有
[0036][0037]
对式(12)积分,得:
[0038][0039]
其中α1≥1,常数
[0040]
由式(13)可知,当t=t
f
时,由可得,由此可得,v2=0,因此在指定暂态时间t
f
,角度跟踪误差θ
e
达到零。
[0041]
接下来,将x
e
视为式(4)的输入,设计x
e
使y
e
在指定暂态时间稳定。令
[0042][0043]
设计lyapunov函数:
[0044]
v2(y
e
)=y
e2
ꢀꢀ
(15)
[0045]
则有
[0046][0047]
将式(14)代入式(4)得:
[0048][0049]
对式(15)求导得:
[0050][0051]
令有
[0052]
[0053]
对式(19)积分,得:
[0054][0055]
其中
[0056]
由式(20)可知,当t=t
f
时,η≤0,由可得,η=0。由此可得,v2=0,因此在指定暂态时间t
f
,y轴跟踪误差y
e
达到零。
[0057]
进一步,令v=v1‑
v2,其中v1=y
e
ω v
r cosθ
e
‑
dω
r sinθ
e
,代入式(3)得:
[0058][0059]
设变量
[0060][0061]
代入式(3)
‑
(4)得到误差系统如下:
[0062][0063][0064]
记由式(6)和v1得:
[0065][0066]
设计lyapunov函数:
[0067]
v3(x
e
,y
e
)=v2(y
e
) z2ꢀꢀ
(26)
[0068]
由式(26)得:对式(26)求导得:
[0069][0070]
并将式(25)代入得:
[0071][0072]
取β=α2 α3,得:
[0073][0074]
对式(29)积分,得:
[0075]
ζ≤ln(c3(t
f
‑
t)
β
1)
ꢀꢀ
(30)
[0076]
其中
[0077]
由式(30)可知,当t=t
f
时,ζ≤0,由式知,ζ=0。由此可得,v3=0,因此在指定暂态时间t
f
,x轴跟踪误差x
e
达到零。
[0078]
进一步,当t≥t
f
时,由式(7)、式(5)可知,ω=ω
r
,再由式(14)可知,x
e
=0,进而再通过式(4)可知,即t≥t
f
时,控制器(6)(7)使跟踪误差系统趋于渐近稳定。
[0079]
因此,由上述可知,坐垫机器人在运动过程中可实现稳定跟踪控制。
[0080]
步骤3)提出了暂态运动时间的自主学习方法,有效优化了机器人的暂态运动时间,提高了系统的暂态运动性能和跟踪精度,其特征在于:描述坐垫机器人暂态运动时间的学习状态state1,state2,state3,state4如下:
[0081]
state1:|v|>v
max and|ω|>ω
max
,t0≤t<t
f
[0082]
state2:|v|>v
max and|ω|≤ω
max
,t0≤t<t
f
[0083]
state3:|v|≤v
max and|ω|>ω
max
,t0≤t<t
f
[0084]
state4:|v|≤v
max and|ω|≤ω
max
,t0≤t<t
f
[0085]
其中,v
max
表示坐垫机器人允许的最大安全速度,ω
max
表示坐垫机器人允许的最大安全角速度
[0086]
暂态运动时间的学习动作a1,a2描述如下:
[0087]
a1:t
f
=t0 δt
[0088]
a2:t
f
=t0‑
δt
[0089]
其中,t0表示初始值,δt为每次自主学习暂态运动时间的调整变化量。
[0090]
设计坐垫机器人自主学习暂态运动时间的奖赏值函数r为:
[0091][0092]
坐垫机器人自主学习暂态运动时间的步骤如下:
[0093]
1)对坐垫机器人(s,a)进行初始化,其中s为坐垫机器人当前学习状态,a为机器人当前采取的动作;设置机器人更新状态学习速率α,衰减系数γ,学习动作的选择概率ε,其中α∈[0,1],γ∈[0,1],ε∈[0,1];
[0094]
2)获取坐垫机器人运动位姿误差,并判断机器人在state1,state2,state3,state4中所处的状态,将其记为s,坐垫机器人以概率ε选取a1,a2中的任意一个动作,并记为a,确定当前时刻的状态行为对(s,a);进一步,根据r获得奖惩值,使坐垫机器人进入下一个状态,记为s',再利用概率ε选择新的动作a',获得新的行为对(s',a'),利用(s',a')并根据当前时刻r的奖惩值对(s,a)的价值进行更新,更新过程为:
[0095]
q(s,a)
←
q(s,a) α[r γq(s',a')
‑
q(s,a)]
ꢀꢀ
(31)
[0096]
其中,q(s,a)为当前状态行为对(s,a)获得的价值;q(s',a')为下一时刻状态行为
对(s',a')的价值;这样根据式(31)的价值,可以完成一次暂态运动时间的自主学习;
[0097]
3)将(s',a')作为当前新的学习状态和学习动作,重复步骤2),机器人不断进行暂态运动时间自主学习,直到完成学习次数,使指定暂态运动时间达到最优。
[0098]
步骤4)基于stm32g4系列单片机将输出pwm信号提供给电机驱动模块,使机器人可帮助使用者跟踪指定的运动轨迹,其特征在于:以stm32g4系列单片机为主控制器,主控制器的输入接电机测速模块、输出接电机驱动模块;电机驱动模块与直流电机相连;电源系统给各个电气设备供电。主控制器控制方法为读取电机编码器的反馈信号与主控制器给定的控制命令信号p
r
和p,计算得出误差信号。根据误差信号,主控制器按照预定的控制算法计算出电机的控制量,送给电机驱动模块,电机转动带动轮子维持自身平衡及按指定方式运动。
[0099]
优点及效果:
[0100]
本发明是一种坐垫服务机器人具有自主学习暂态运动时间的稳定控制方法,具有如下优点:
[0101]
本发明利用坐垫机器人的运动学方程并加入质心偏移干扰量,通过坐标变换得到位姿误差方程,建立了坐垫机器人的轨迹跟踪误差系统;提出了一种指定暂态运动时间的稳定控制方法,使运动位姿和运动速度在指定时间同时实现稳定跟踪;并提出了暂态运动时间的自主学习方法,有效优化了机器人的暂态运动时间,提高了人机系统的跟踪精度和安全性。本发明优化机器人的暂态运动时间,提高系统的暂态运动性能和跟踪精度。
附图说明:
[0102]
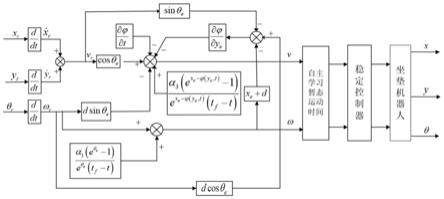
图1为本发明控制器工作框图;
[0103]
图2为本发明系统坐标图;
[0104]
图3为本发明stm32g4单片机最小系统;
[0105]
图4为本发明电源电路;
[0106]
图5为本发明电机驱动与测速模块电路;
[0107]
图6为本发明硬件总体原理电路。
具体实施方式:
[0108]
下面结合附图对本发明做进一步的说明,但本发明保护范围不受实施例的限制。
[0109]
本发明利用坐垫机器人的运动学方程并加入质心偏移干扰量,通过坐标变换得到位姿误差方程,建立坐垫机器人的轨迹跟踪误差系统;提出了一种指定暂态运动时间的稳定控制方法,使运动位姿和运动速度在指定时间同时实现稳定跟踪;进一步,提出了暂态运动时间的自主学习方法,有效优化了机器人的暂态运动时间,提高了系统的暂态运动性能和跟踪精度;
[0110]
一种坐垫服务机器人具有自主学习暂态运动时间的稳定控制方法,其特征在于:
[0111]
1)利用坐垫机器人的运动学方程并加入质心偏移干扰量,通过坐标变换得到位姿误差方程,建立坐垫机器人的轨迹跟踪误差系统;
[0112]
2)提出了一种指定暂态运动时间的稳定控制方法,使运动位姿和运动速度在指定时间同时实现稳定跟踪;
≥1,α3≥1为控制器调节参数。t
f
表示指定暂态运动时间;t0表示初始时刻。
[0129]
将角速度控制器代入式(5)可得:
[0130][0131]
设计lyapunov函数:
[0132]
v1(θ
e
)=θ
e2
ꢀꢀ
(9)
[0133]
则有
[0134][0135]
对式(9)求导得:
[0136][0137]
令有
[0138][0139]
对式(12)积分,得:
[0140][0141]
其中α1≥1,常数
[0142]
由式(13)可知,当t=t
f
时,由可得,由此可得,v2=0,因此在指定暂态时间t
f
,角度跟踪误差θ
e
达到零。
[0143]
接下来,将x
e
视为式(4)的输入,设计x
e
使ye在指定暂态时间稳定。令
[0144][0145]
设计lyapunov函数:
[0146]
v2(y
e
)=y
e2
ꢀꢀ
(15)
[0147]
则有
[0148][0149]
将式(14)代入式(4)得:
[0150][0151]
对式(15)求导得:
[0152][0153]
令有
[0154][0155]
对式(19)积分,得:
[0156][0157]
其中
[0158]
由式(20)可知,当t=t
f
时,η≤0,由可得,η=0。由此可得,v2=0,因此在指定暂态时间t
f
,y轴跟踪误差y
e
达到零。
[0159]
进一步,令v=v1‑
v2,其中v1=y
e
ω v
r cosθ
e
‑
dω
r sinθ
e
,代入式(3)得:
[0160][0161]
设变量
[0162][0163]
代入式(3)
‑
(4)得到误差系统如下:
[0164][0165][0166]
记由式(6)和v1得:
[0167][0168]
设计lyapunov函数:
[0169][0170]
由式(26)得:v3≥z2,对式(26)求导得:
[0171][0172]
并将式(25)代入得:
[0173][0174]
取β=α2 α3,得:
[0175][0176]
对式(29)积分,得:
[0177]
ζ≤ln(c3(t
f
‑
t)
β
1)
ꢀꢀ
(30)
[0178]
其中
[0179]
由式(30)可知,当t=t
f
时,ζ≤0,由式知,ζ=0。由此可得,v3=0,因此在指定暂态时间t
f
,x轴跟踪误差xe达到零。
[0180]
进一步,当t≥t
f
时,由式(7)、式(5)可知,ω=ω
r
,再由式(14)可知,x
e
=0,进而再通过式(4)可知,即t≥t
f
时,控制器(6)(7)使跟踪误差系统趋于渐近稳定。
[0181]
因此,由上述可知,坐垫机器人在运动过程中可实现稳定跟踪控制。
[0182]
步骤3)提出了暂态运动时间的自主学习方法,有效优化了机器人的暂态运动时间,提高了系统的暂态运动性能和跟踪精度,其特征在于:描述坐垫机器人暂态运动时间的学习状态state1,state2,state3,state4如下:
[0183]
state1:|v|>v
max and|ω|>ω
max
,t0≤t<t
f
[0184]
state2:|v|>v
max and|ω|≤ω
max
,t0≤t<t
f
[0185]
state3:|v|≤v
max and|ω|>ω
max
,t0≤t<t
f
[0186]
state4:|v|≤v
max and|ω|≤ω
max
,t0≤t<t
f
[0187]
其中,v
max
表示坐垫机器人允许的最大安全速度,ω
max
表示坐垫机器人允许的最大安全角速度。
[0188]
暂态运动时间的学习动作a1,a2描述如下:
[0189]
a1:t
f
=t0 δt
[0190]
a2:t
f
=t0‑
δt
[0191]
其中,t0表示初始值,δt为每次自主学习暂态运动时间的调整变化量。
[0192]
设计坐垫机器人自主学习暂态运动时间的奖赏值函数r为:
[0193][0194]
坐垫机器人自主学习暂态运动时间的步骤如下:
[0195]
1)对坐垫机器人(s,a)进行初始化,其中s为坐垫机器人当前学习状态,a为机器人当前采取的动作;设置机器人更新状态学习速率α,衰减系数γ,学习动作的选择概率ε,其中α∈[0,1],γ∈[0,1],ε∈[0,1];
[0196]
2)获取坐垫机器人运动位姿误差,并判断机器人在state1,state2,state3,state4中所处的状态,将其记为s,坐垫机器人以概率ε选取a1,a2中的任意一个动作,并记为a,确定当前时刻的状态行为对(s,a);进一步,根据r获得奖惩值,使坐垫机器人进入下一个状态,记为s',再利用概率ε选择新的动作a',获得新的行为对(s',a'),利用(s',a')并根据当前时刻r的奖惩值对(s,a)的价值进行更新,更新过程为:
[0197]
q(s,a)
←
q(s,a) α[r γq(s',a')
‑
q(s,a)]
ꢀꢀ
(31)
[0198]
其中,q(s,a)为当前状态行为对(s,a)获得的价值;q(s',a')为下一时刻状态行为对(s',a')的价值;这样根据式(31)的价值,可以完成一次暂态运动时间的自主学习;
[0199]
3)将(s',a')作为当前新的学习状态和学习动作,重复步骤2),机器人不断进行暂态运动时间自主学习,直到完成学习次数,使指定暂态运动时间达到最优。
[0200]
步骤4)基于stm32f411系列单片机将输出pwm信号提供给电机驱动模块,使机器人可帮助使用者跟踪指定的运动轨迹,其特征在于:以stm32f411系列单片机为主控制器,主控制器的输入接电机测速模块、输出接电机驱动模块;电机驱动模块与直流电机相连;电源系统给各个电气设备供电。主控制器控制方法为读取电机编码器的反馈信号与主控制器给定的控制命令信号p
r
和p,计算得出误差信号。根据误差信号,主控制器按照预定的控制算法计算出电机的控制量,送给电机驱动模块,电机转动带动轮子维持自身平衡及按指定方式运动。
[0201]
本发明解决了坐垫服务机器人具有自主学习暂态运动时间的稳定控制问题。基于建立的坐垫机器人轨迹跟踪误差系统,提出了指定暂态运动时间的稳定控制方法,使运动位姿和运动速度在指定时间同时实现稳定跟踪;同时,提出了暂态运动时间的自主学习方法,有效优化了机器人的暂态运动时间,提高了人机系统的跟踪精度和安全性。
[0202]
本发明通过新技术优化了暂态运动时间,使机器人在指定时间稳定跟踪运动轨迹,提高了坐垫机器人系统的跟踪精度,避免较长时间的暂态运动产生过大跟踪误差而发生碰撞危险,保障了使用者的安全。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

