1.本技术属于飞行控制技术领域,特别涉及一种防失速控制方法及装置。
背景技术:
2.为应对复杂多变的空中态势,现代飞机不仅需要具备隐身性能和超视距能力,还需要具备高机动性能和近距离格斗能力。在执行追踪/锁定目标、躲避敌方雷达、低空突防和攻击后逃逸等任务时,飞机经常需要进行大迎角飞行。进行这类动作的飞机一般处于安全飞行边界附近,如果飞行员做出危险动作,例如继续拉大迎角操作,则极有可能导使飞机超出迎角安全边界,最终导致飞机失速,引发飞行事故。
3.大迎角失速是指在给定飞行条件下,飞机迎角大于可达到的最大可用升力系数所对应的失速迎角,此时发生气流分离而引起危险飞行状态。在该状态下,飞机升力明显下降、飞机操纵发生抖振、机翼非指令性摇晃、机头非指令性侧偏、飞机非指令性俯仰摆动或是突然抬头等,都会导致迎角继续增加。失速时飞机的操纵性明显变差,有时甚至完全丧失操纵性。失速进一步发展可达到过失速状态,呈现出若干特殊的运动特性,包括:偏离、过失速旋转、尾旋和深失速等。
4.高机动飞机的机动过程影响因素复杂,表现出不同的响应特征,而且发生危险时,过程快、偶发性强。虽然有经验的飞行员能根据操纵和飞机响应判断是否进行了危险动作操纵,但又容易受人的主观感受、飞行经验和其他不确定因素的影响。
5.传统的飞行控制系统中,飞行安全约束能够根据飞机的迎角判断其飞行状态,将飞机约束在安全飞行边界内。然而这种约束方式无法对飞机的飞行状态进行预测,难以规避危险动作带来的潜在风险。同时,这种约束方法没有利用全部的飞行边界,因此限制了飞机性能的发挥。
技术实现要素:
6.本技术的目的是提供了一种防失速控制方法,以解决或减轻背景技术中的至少一个问题。
7.在一方面,本技术提供的技术方案是:一种防失速控制方法,包括:
8.获取飞机状态参数及飞行员操作参数并进行实时解算,以获得迎角限制边界;
9.实时判断飞机的当前迎角与迎角限制边界的关系,若飞机的当前迎角没有超出迎角限制边界,则不进行任何干预;当飞机的当前迎角超过迎角限制边界时,隔离飞行员的操作动作,不再响应拉杆操作,同时启东迎角保护控制。
10.进一步的,所述飞机状态参数包括飞行高度、速度及飞机迎角。
11.进一步的,所述飞行员操作参数为飞行员对驾驶杆的操作量。
12.进一步的,所述迎角限制边界是根据当前状态下,飞行员的操作是否会使飞机的迎角接近或超出迎角安全限制边界从而进入危险状态而确定的。
13.在另一方面,本技术提供的技术方案是:一种防失速控制装置,包括:
14.迎角限制边界确定模块,用于获取飞机状态参数及飞行员操作参数并进行实时解算,以获得迎角限制边界;
15.状态判断模块,用于实时判断飞机的当前迎角与迎角限制边界的关系,若飞机的当前迎角没有超出迎角限制边界,则不进行任何干预;当飞机的当前迎角超过迎角限制边界时,隔离飞行员的操作动作,不再响应拉杆操作,同时启东迎角保护控制。
16.进一步的,所述飞机状态参数包括飞行高度、速度及飞机迎角。
17.进一步的,所述飞行员操作参数为飞行员对驾驶杆的操作量。
18.进一步的,所述迎角限制边界是根据当前状态下,飞行员的操作是否会使飞机的迎角接近或超出迎角安全限制边界从而进入危险状态而确定的。
19.在最后一个方面,本技术提供的技术放是:一种飞行控制系统,所述飞行控制系统包括:
20.一个或多个处理装置;
21.用于存储一个或多个程序的存储装置;
22.当一个或多个程序被一个或多个处理装置执行时,使得一个或多个处理装置实现如上任一所述的防失速控制方法。
23.本技术提供的防失速控制方法可以对驾驶员的危险动作和飞机的危险状态进行识别,在飞行员出现做出危险动作的趋势时进行告警,并且在危险动作已经做出时对其进行隔离,从而使飞机具备安全飞行边界告警、危险状态自动识别、隔离能力。
附图说明
24.为了更清楚地说明本技术提供的技术方案,下面将对附图作简单地介绍。显而易见地,下面描述的附图仅仅是本技术的一些实施例。
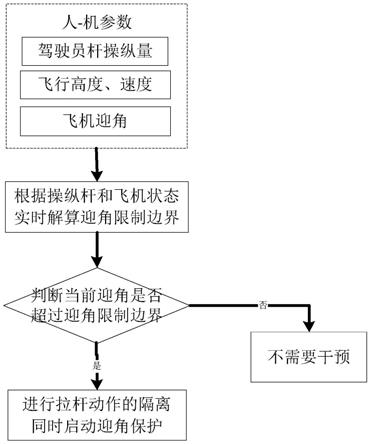
25.图1为本技术的防失速控制方法示意图。
26.图2为本技术的防失速控制装置示意图。
具体实施方式
27.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。
28.飞机的飞行被限制在由飞行条件边界、飞行状态边界和动态特性危险状态边界组成的包线内,这种限制既是对飞机运动的限制,也是对飞行员操纵行为的限制。在典型危险机动任务中,飞机多处于使用或可用迎角飞行包线边界附近,飞行员过大或过猛的操纵很容易使飞机陷入危险的飞行状态,威胁飞行安全。
29.为了防止飞行员因过大的操纵量而导致飞机进入大迎角失速状态,本技术提供了具有工程应用价值的防失速控制方法,通过对对驾驶员危险动作的识别,以在飞行员出现做出具有危险动作的趋势时进行隔离及告警提示,从而避免飞机因危险动作操作进入大迎角失速状态。
30.如图1所示,本技术提供的防失速控制方法包括:
31.首先获取飞机状态参数及飞行员操作参数并进行实时解算,以获得迎角限制边界。其中,飞机状态参数包括飞行当前状态下高度、速度等,飞行员操作参数是指飞行员对
操纵拉杆的拉杆操纵量。
32.之后实时的判断飞机的当前迎角及迎角限制边界的关系,若飞机的当前迎角没有超出飞机限制边界,则不进行任何干预;当飞机的当前迎角超过迎角限制边界时,立刻进行拉杆动作的隔离,不再响应拉杆操作,同时启东迎角保护控制。
33.其中,上述迎角限制边界是在飞机迎角安全边界(通常根据飞机的性能、气动布局等参数得到的固定值)的基础上,结合飞行员操纵动作带来的趋势和影响而确定的。具体的,判断飞机当前状态下,飞行员对飞机的操作是否会使飞机的当前迎角接近或超出迎角安全边界,从而进入危险状态。
34.基于飞行实验或仿真可以得到飞行高度、速度与杆操纵量相对应的迎角响应数据,迎角响应数据即可在上述状态下获得迎角的未来趋势,根据迎角固定限值/迎角安全边界与迎角响应趋势值即得到迎角限值边界,拟合计算飞行状态量与杆输入量的响应函数,确定影响目标状态量变化的敏感项,预测目标状态量瞬态响应峰值的方法。
35.如表2所示即本技术一实施例中的得到杆输入边界。
36.表2杆输入边界
[0037][0038]
本技术所提供的防失速控制方法可以对危险动作和危险状态进行识别,在飞行员出现做出危险动作的趋势时进行告警,在危险动作已经做出时对其进行隔离,从而使飞机具备安全飞行边界告警、危险状态自动识别、隔离能力。
[0039]
本技术的防失速控制方法可以自动保持飞机飞行在迎角安全边界内,不需要考虑机动动作会使飞机超过结构、气动和控制限制,能够提升飞机在飞行边界附近飞行的安全性;同时允许飞行员发挥飞机的最大性能,从而降低飞行任务时间,降低飞行员因为飞行边界保护而始终监视驾驶舱仪器的需求,达到降低飞行员负担的目的。
[0040]
本技术所提供的防失速控制方法既可以保证现代飞机高机动性能的收益,如作战效能的提高、飞行包线的扩充等,又可以对执行高机动任务的飞机进行安全保护,提高飞行安全,减小飞行员的体力消耗,从而使战斗机的整体作战能力得到增强。
[0041]
另外,如图2所示,本技术还提供了一种防失速控制装置10,包括:
[0042]
迎角限制边界确定模块11,用于获取飞机状态参数及飞行员操作参数并进行实时解算,以获得迎角限制边界;
[0043]
状态判断模块12,用于实时判断飞机的当前迎角与迎角限制边界的关系,若飞机的当前迎角没有超出迎角限制边界,则不进行任何干预;当飞机的当前迎角超过迎角限制边界时,隔离飞行员的操作动作,不再响应拉杆操作,同时启东迎角保护控制。
[0044]
进一步的,所述飞机状态参数包括飞行高度、速度及飞机迎角。
[0045]
进一步的,所述飞行员操作参数为飞行员对驾驶杆的操作量。
[0046]
进一步的,所述迎角限制边界是根据当前状态下,飞行员的操作是否会使飞机的迎角接近或超出迎角安全限制边界从而进入危险状态而确定的。
[0047]
最后,本技术还提供一种飞行控制系统,所述飞行控制系统包括:一个或多个处理装置;用于存储一个或多个程序的存储装置;当一个或多个程序被一个或多个处理装置执行时,使得一个或多个处理装置实现如上任一所述的防失速控制方法。
[0048]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

