本实用新型涉及连续镀敷装置。
背景技术:
在日本特开2018-3150号公报(专利文献1)中记载有连续镀敷装置。连续镀敷装置具有放卷机、镀敷区域和卷绕机。
专利文献1:日本特开2018-3150号公报
技术实现要素:
本实用新型的目的在于,提供能够降低镀敷膜的品质的波动的连续镀敷装置。
本实用新型所涉及的连续镀敷装置具有放卷机、镀敷区域、卷绕机、第1可动辊、第1位置传感器和第1控制部。放卷机将基材送出。镀敷区域对基材进行镀敷。卷绕机将镀敷后的基材进行回收。第1可动辊在基材的行进方向上配置于放卷机和镀敷区域之间,且随动于基材的移动而旋转。第1位置传感器对第1可动辊的位置进行检测。第1控制部基于由第1位置传感器检测出的第1可动辊的第1位置信息,对放卷机的放出速度进行控制。
实用新型的效果
根据本实用新型,能够提供能够降低镀敷膜的品质的波动的连续镀敷装置。
附图说明
图1是表示本实施方式所涉及的连续镀敷装置的结构的俯视示意图。
图2是表示本实施方式所涉及的连续镀敷装置的结构的侧视示意图。
图3是表示第1张力调整机构的结构的俯视示意图。
图4是表示第1张力调整机构的结构的侧视示意图。
图5是表示第1张力调整机构的第1状态的俯视示意图。
图6是表示第1张力调整机构的第1状态的侧视示意图。
图7是表示第1张力调整机构的第2状态的俯视示意图。
图8是表示第1张力调整机构的第2状态的侧视示意图。
图9是表示第2张力调整机构的结构的俯视示意图。
图10是表示第2张力调整机构的结构的侧视示意图。
图11是表示第2张力调整机构的第1状态的俯视示意图。
图12是表示第2张力调整机构的第1状态的侧视示意图。
图13是表示第2张力调整机构的第2状态的俯视示意图。
图14是表示第2张力调整机构的第2状态的侧视示意图。
图15是表示基材的输送机构的结构的侧视示意图。
图16是表示镀敷区域的结构的俯视示意图。
图17是沿图16的xⅶ-xⅶ线的剖面示意图。
图18是沿图16的xⅷ-xⅷ线的剖面示意图。
标号的说明
1前处理区域
2镀敷区域
3后处理区域
4放卷机
5卷绕机
6第1轮
7第2轮
8链条
9电源
10夹紧工具
20喷流管
21正极电极
22镀敷槽
23管部
24喷流孔
25镀敷液
30第1张力调整机构
31第1上游侧固定辊
32第1下游侧固定辊
33第1可动辊
34第1可动部
35第1带轮
36第1线
37第1重物部
38第1连接部
40第2张力调整机构
41第2上游侧固定辊
42第2下游侧固定辊
43第2可动辊
44第2可动部
45第2带轮
46第2线
47第2重物部
48第2连接部
51第1固定部
52第1摆锤部
53第1位置传感器
54第1控制部
61第2固定部
62第2摆锤部
63第2位置传感器
64第2控制部
100连续镀敷装置
a基材
b行进方向
c1第1方向
c2第2方向
p1第1位置
p2第2位置
p3基准位置
具体实施方式
[本实用新型的实施方式的说明]
下面,基于附图对本实用新型的实施方式进行说明。此外,在下面的附图中对相同或者相当的部分标注同一参照编号,不重复其说明。
(1)本实用新型所涉及的连续镀敷装置100具有放卷机4、镀敷区域2、卷绕机5、第1可动辊33、第1位置传感器53和第1控制部54。放卷机4将基材a送出。镀敷区域2对基材a进行镀敷。卷绕机5将镀敷后的基材a进行回收。第1可动辊33在基材a的行进方向上配置于放卷机4和镀敷区域2之间,且随动于基材a的移动而旋转。第1位置传感器53对第1可动辊33的位置进行检测。第1控制部54基于由第1位置传感器53检测出的第1可动辊33的第1位置信息,对放卷机4的放出速度进行控制。
如果基材a的张力变大,则基材a的拉应力变大。相反地,如果基材a的张力变小,则基材a的拉应力变小。即,如果基材a的张力不同,则基材a的拉应力变化。如果基材a的拉应力的波动大,则在基材a形成的镀敷膜的品质的波动也变大。
上述(1)所涉及的连续镀敷装置100具有第1控制部54,该第1控制部54基于由第1位置传感器53检测出的第1可动辊33的第1位置信息,对放卷机4的放出速度进行控制。由此,能够对基材a的张力进行控制。其结果,能够抑制基材a的拉应力大幅地变化。因此,能够降低在基材a形成的镀敷膜的品质的波动。
(2)上述(1)所涉及的连续镀敷装置100也可以具有:第1可动部34,其载置有第1可动辊33;第1线36,其安装于第1可动部34;以及第1重物部37,其安装于第1线36。由此,能够以恒定的力拉拽第1可动辊33。其结果,在基材a的张力变化时,第1可动辊33的位置变化。通过基于第1可动辊33的位置信息而对放卷机4的放出速度进行控制,从而能够高精度地对基材a的张力进行控制。
(3)上述(1)或者(2)所涉及的连续镀敷装置100也可以具有第2可动辊43、第2位置传感器63和第2控制部64。第2可动辊43在基材a的行进方向上配置于放卷机4和镀敷区域2之间,且随动于基材a的移动而旋转。第2位置传感器63对第2可动辊43的位置进行检测。第2控制部64基于由第2位置传感器63检测出的第2可动辊43的第2位置信息,对卷绕机5的卷绕速度进行控制。由此,能够对基材a的张力进行控制。其结果,能够抑制基材a的张力过度地变大而基材a伸长,由此在形成于基材a的镀敷膜发生龟裂。因此,能够提高在基材a形成的镀敷膜的品质。
(4)上述(3)所涉及的连续镀敷装置100也可以具有:第2可动部44,其载置有第2可动辊43;第2线46,其安装于第2可动部44;以及第2重物部47,其安装于第2线46。由此,能够以恒定的力拉拽第2可动辊43。其结果,在基材a的张力变化时,第2可动辊43的位置变化。通过基于第2可动辊43的位置信息而对卷绕机5的卷绕速度进行控制,从而能够高精度地对基材a的张力进行控制。
(5)上述(1)或者(2)所涉及的连续镀敷装置100也可以具有夹紧工具10。夹紧工具10在镀敷区域2中,在抓持着基材a的状态下输送基材a。
[本实用新型的实施方式的详细内容]
(连续镀敷装置)
首先,对本实用新型的一个实施方式(也称为本实施方式)所涉及的连续镀敷装置100的结构进行说明。
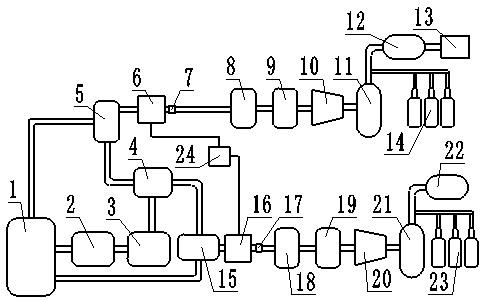
图1是表示本实施方式所涉及的连续镀敷装置的结构的俯视示意图。如图1所示,连续镀敷装置100主要具有放卷机4、卷绕机5、前处理区域1、镀敷区域2、后处理区域3、第1张力调整机构30和第2张力调整机构40。放卷机4是将镀敷前的基材a送出的机械。镀敷前的基材a以辊状卷绕于放卷机4。卷绕机5是将镀敷后的基材a回收的机械。镀敷后的基材a以辊状卷绕于卷绕机5。基材a的种类并不特别受到限定,例如为ccl(coppercladlaminate)。ccl例如是在聚酰亚胺层上形成有铜层。
图2是表示本实施方式所涉及的连续镀敷装置的结构的侧视示意图。如图2所示,在基材a的行进方向上,第1张力调整机构30配置于放卷机4和前处理区域1之间。在基材a的行进方向上,第1张力调整机构30配置于放卷机4和前处理区域1之间。在基材a的行进方向上,前处理区域1配置于第1张力调整机构30和镀敷区域2之间。镀敷区域2配置于前处理区域1和后处理区域3之间。在基材a的行进方向上,后处理区域3配置于镀敷区域2和第2张力调整机构40之间。在基材a的行进方向上,第2张力调整机构40配置于后处理区域3和卷绕机5之间。
从放卷机4放出的基材a经过第1张力调整机构30而输送至前处理区域1。在前处理区域1中进行镀敷前的基材a的清洗。在前处理区域1中例如进行脱脂处理。具体地说,在前处理区域1中进行酸处理、水洗处理等。经过了前处理区域1的基材a输送至镀敷区域2。在镀敷区域2中对基材a进行镀敷处理。经过了镀敷区域2的基材a输送至后处理区域3。在后处理区域3中进行镀敷后的基材a的清洗。在后处理区域3中例如将附着于基材a的镀敷液25去除。在后处理区域3中进行水洗处理、干燥处理等。从后处理区域3输出的基材a经过第2张力调整机构40,由卷绕机5进行卷绕。
图3是表示第1张力调整机构的结构的俯视示意图。如图3所示,第1张力调整机构30主要具有第1可动辊33、第1上游侧固定辊31、第1下游侧固定辊32、第1可动部34、第1线36、第1带轮35、第1重物部37、第1位置传感器53和第1连接部38。第1可动辊33在基材a的行进方向上配置于放卷机4和镀敷区域2之间。第1可动辊33随动于基材a的移动而旋转。
第1上游侧固定辊31在从第1可动辊33观察时,位于基材a的行进方向的上游。第1下游侧固定辊32在从第1可动辊33观察时,位于基材a的行进方向的下游。第1上游侧固定辊31及第1下游侧固定辊32各自随动于基材a的移动而旋转。第1上游侧固定辊31及第1下游侧固定辊32各自例如固定于地板。
如图3所示,从放卷机4送出的基材a依次移动至第1上游侧固定辊31、第1可动辊33、第1下游侧固定辊32。经过了第1下游侧固定辊32的基材a向前处理区域1输送。通过第1上游侧固定辊31使从放卷机4送出的基材a的行进方向变化。从第1上游侧固定辊31朝向第1可动辊33的基材a的行进方向,与从第1可动辊33朝向第1下游侧固定辊32的基材a的行进方向相反。通过第1下游侧固定辊32使经过了第1可动辊33的基材a的行进方向变化。
图4是表示第1张力调整机构的结构的侧视示意图。如图4所示,第1可动辊33载置于第1可动部34。第1线36安装于第1可动部34。第1重物部37安装于第1线36。第1线36将第1重物部37和第1可动部34相连。第1线36安装于第1带轮35。第1可动部34能够在水平方向移动地构成。第1可动部34也可以安装于未图示的轨道。
第1重物部37安装于第1线36的一端。处于第1重物部37和第1带轮35之间的第1线36的部分沿铅垂方向延伸。处于第1带轮35和第1可动部34之间的第1线36的部分沿水平方向延伸。通过第1重物部37,第1可动部34向朝向第1带轮35的方向被拉拽。第1可动辊33固定于第1可动部34。通过第1重物部37,第1可动辊33向图中的左方向被拉拽。第1可动辊33能够在水平方向移动。
如图3所示,第1位置传感器53具有第1固定部51和第1摆锤部52。第1摆锤部52可以经由第1连接部38而安装于第1可动部34。第1位置传感器53能够对第1可动辊33的位置进行检测。关于第1可动辊33的位置的检测方法在后面记述。
图5是表示第1张力调整机构的第1状态的俯视示意图。如果第1上游侧固定辊31中的基材a的送出速度大于第1下游侧固定辊32中的基材a的卷绕速度,则处于第1下游侧固定辊32和第1上游侧固定辊31之间的基材a的张力变小。在该情况下,通过基材a的张力将第1可动辊33拉拽的力与第1重物部37的重力相比变小。其结果,第1可动辊33朝向接近第1带轮35的方向移动。
如图5所示,在俯视观察时,第1摆锤部52向第1带轮35所在的方向倾斜。第1位置传感器53例如基于第1摆锤部52的倾斜方向及倾斜角度,对第1可动辊33的第1位置信息进行检测。第1可动辊33的第1位置信息例如为第1可动辊33的移动方向及移动距离。
图6是表示第1张力调整机构的第1状态的侧视示意图。如果基材a的张力变小,则第1可动辊33向第1方向c1移动。第1方向c1是第1可动辊33接近第1带轮35的方向。第1可动辊33的旋转轴的位置从基准位置p3移动至第1位置p1。
图7是表示第1张力调整机构的第2状态的俯视示意图。如果第1上游侧固定辊31中的基材a的送出速度小于第1下游侧固定辊32中的基材a的卷绕速度,则处于第1下游侧固定辊32和第1上游侧固定辊31之间的基材a的张力变大。在该情况下,通过基材a的张力将第1可动辊33拉拽的力与第1重物部37的重力相比变大。其结果,第1可动辊33朝向远离第1带轮35的方向移动。
如图7所示,在俯视观察时,第1摆锤部52向与第1带轮35所在的方向相反的方向倾斜。第1位置传感器53例如基于第1摆锤部52的倾斜方向及倾斜角度,对第1可动辊33的第1位置信息进行检测。第1可动辊33的第1位置信息例如为第1可动辊33的移动方向及移动距离。
图8是表示第1张力调整机构的第2状态的侧视示意图。如果基材a的张力变大,则第1可动辊33向第2方向c2移动。第2方向c2是第1可动辊33远离第1带轮35的方向。第1可动辊33的旋转轴的位置从基准位置p3移动至第2位置p2。
第1控制部54能够基于由第1位置传感器53检测出的第1可动辊33的第1位置信息对放卷机4的放出速度进行控制。从另一观点而言,通过第1控制部54将由第1位置传感器53检测出的第1可动辊33的第1位置信息反馈至放卷机4。具体地说,在第1可动辊33的旋转轴的位置从基准位置p3向第1带轮35所处的方向移动的情况下,降低放卷机4的放出速度。由此,能够增大基材a的张力。相反地,在第1可动辊33的旋转轴的位置从基准位置p3向与第1带轮35所处的方向相反侧移动的情况下,提高放卷机4的放出速度。由此,能够减小基材a的张力。如以上所述,第1控制部54能够对基材a的张力进行控制,以使得基材a的张力维持在规定范围内。
图9是表示第2张力调整机构的结构的俯视示意图。如图9所示,第2张力调整机构40主要具有第2可动辊43、第2上游侧固定辊41、第2下游侧固定辊42、第2可动部44、第2线46、第2带轮45、第2重物部47、第2位置传感器63和第2连接部48。第2可动辊43在基材a的行进方向上配置于卷绕机5和镀敷区域2之间。第2可动辊43随动于基材a的移动而旋转。
第2上游侧固定辊41在从第2可动辊43观察时,位于基材a的行进方向的上游。第2下游侧固定辊42在从第2可动辊43观察时,位于基材a的行进方向的下游。第2上游侧固定辊41及第2下游侧固定辊42各自随动于基材a的移动而旋转。第2上游侧固定辊41及第2下游侧固定辊42各自例如固定于地板。
如图9所示,从后处理区域3送出的基材a依次移动至第2上游侧固定辊41、第2可动辊43、第2下游侧固定辊42。经过了第2下游侧固定辊42的基材a向卷绕机5输送。通过第2上游侧固定辊41使从后处理区域3送出的基材a的行进方向变化。从第2上游侧固定辊41朝向第2可动辊43的基材a的行进方向,与从第2可动辊43朝向第2下游侧固定辊42的基材a的行进方向相反。通过第2下游侧固定辊42使经过了第2可动辊43的基材a的行进方向变化。
图10是表示第2张力调整机构的结构的侧视示意图。如图10所示,第2可动辊43载置于第2可动部44。第2线46安装于第2可动部44。第2重物部47安装于第2线46。第2线46将第2重物部47和第2可动部44相连。第2线46安装于第2带轮45。第2可动部44能够在水平方向移动地构成。第2可动部44也可以安装于未图示的轨道。
第2重物部47安装于第2线46的一端。处于第2重物部47和第2带轮45之间的第2线46的部分沿铅垂方向延伸。处于第2带轮45和第2可动部44之间的第2线46的部分沿水平方向延伸。通过第2重物部47将第2可动部44向朝向第2带轮45的方向拉拽。第2可动辊43固定于第2可动部44。通过第2重物部47将第2可动辊43向图中的左方向拉拽。第2可动辊43能够在水平方向移动。
如图9所示,第2位置传感器63具有第2固定部61和第2摆锤部62。第2摆锤部62可以经由第2连接部48而安装于第2可动部44。第2位置传感器63能够对第2可动辊43的位置进行检测。关于第2可动辊43的位置的检测方法在后面记述。
图11是表示第2张力调整机构的第1状态的俯视示意图。如果第2上游侧固定辊41中的基材a的送出速度大于第2下游侧固定辊42中的基材a的卷绕速度,则处于第2下游侧固定辊42和第2上游侧固定辊41之间的基材a的张力变小。在该情况下,通过基材a的张力将第2可动辊43拉拽的力与第2重物部47的重力相比变小。其结果,第2可动辊43朝向接近第2带轮45的方向移动。
如图11所示,在俯视观察时,第2摆锤部62向第2带轮45所在的方向倾斜。第2位置传感器63例如基于第2摆锤部62的倾斜方向及倾斜角度对第2可动辊43的第2位置信息进行检测。第2可动辊43的第2位置信息例如为第2可动辊43的移动方向及移动距离。
图12是表示第2张力调整机构的第1状态的侧视示意图。如果基材a的张力变小,则第2可动辊43向第1方向c1移动。第1方向c1是第2可动辊43接近第2带轮45的方向。第2可动辊43的旋转轴的位置从基准位置p3移动至第1位置p1。
图13是表示第2张力调整机构的第2状态的俯视示意图。如果第2上游侧固定辊41中的基材a的送出速度小于第2下游侧固定辊42中的基材a的卷绕速度,则处于第2下游侧固定辊42和第2上游侧固定辊41之间的基材a的张力变大。在该情况下,通过基材a的张力将第2可动辊43拉拽的力与第2重物部47的重力相比变大。其结果,第2可动辊43朝向远离第2带轮45的方向移动。
如图13所示,在俯视观察时,第2摆锤部62向与第2带轮45所处的方向相反的方向倾斜。第2位置传感器例如基于第2摆锤部62的倾斜方向及倾斜角度对第2可动辊43的第2位置信息进行检测。第2可动辊43的第2位置信息例如为第2可动辊43的移动方向及移动距离。
图14是表示第2张力调整机构的第2状态的侧视示意图。如果基材a的张力变大,则第2可动辊43向第2方向c2移动。第2方向c2是第2可动辊43远离第2带轮45的方向。第2可动辊43的旋转轴的位置从基准位置p3移动至第2位置p2。
第2控制部64能够基于由第2位置传感器63检测出的第2可动辊43的第2位置信息对卷绕机5的卷绕速度进行控制。从另一观点而言,通过第2控制部64,将由第2位置传感器63检测出的第2可动辊43的第2位置信息反馈至卷绕机5。具体地说,在第2可动辊43的旋转轴的位置从基准位置p3向第2带轮45所处的方向移动的情况下,提高卷绕机5的卷绕速度。由此,能够增大基材a的张力。相反地,在第2可动辊43的旋转轴的位置从基准位置p3向与第2带轮45所处的方向相反侧移动的情况下,降低卷绕机5的卷绕速度。由此,能够减小基材a的张力。如以上所述,第2控制部64能够对基材a的张力进行控制,以使得基材a的张力维持在规定范围内。
图15是表示基材的输送机构的结构的侧视示意图。如图15所示,连续镀敷装置100例如还具有多个夹紧工具10、第1轮6、第2轮7和链条8。第1轮6在从镀敷区域2观察时配置于前处理区域1侧。第2轮7在从镀敷区域2观察时配置于后处理区域3侧。链条8安装于第1轮6及第2轮7。第1轮6及第2轮7旋转,由此链条8旋转。
在链条8安装有多个夹紧工具10。下侧的链条8的行进方向与基材a的行进方向b相同。上侧的链条8的行进方向与基材a的行进方向b相反。在经过了第1轮6的链条8的部分安装的夹紧工具10抓持基材a。在夹紧工具10正在经过镀敷区域2之上的期间,夹紧工具10在抓持着基材a的状态下输送基材a。在接近第2轮7的链条8的部分安装的夹紧工具10放开基材a。将基材a放开的夹紧工具10绕第2轮7进行旋转。如以上所述,夹紧工具10在镀敷区域2中,在抓持着基材a的状态下输送基材a。在镀敷区域2中,基材a以恒定的速度移动。另一方面,在第1张力调整机构30及第2张力调整机构40各自的区域中,基材a的移动速度变化。
图16是表示镀敷区域的结构的俯视示意图。如图16所示,镀敷区域2主要具有镀敷槽22、镀敷液25、正极电极21和喷流管20。如图16所示,正极电极21和喷流管20沿与基材a的行进方向b平行的方向交替地配置。正极电极21设置于基材a的两侧。喷流管20设置于基材a的两侧。正极电极21的形状例如为板状。
图17是沿图16的xⅶ-xⅶ线的剖面示意图。如图17所示,一对正极电极21各自浸渍于镀敷液25。一对正极电极21各自与电源9的正极电连接。一对正极电极21中的一者与基材a的一个面相对。一对正极电极21中的另一者与基材a的另一个面相对。夹紧工具10以夹着基材a的上端部的方式抓持基材a。夹紧工具10与电源9的负极电连接。经由夹紧工具10对基材a施加电压。夹紧工具10的一部分浸渍于镀敷液25。
图18是沿图16的xⅷ-xⅷ线的剖面示意图。如图18所示,一对喷流管20各自具有管部23和多个喷流孔24。在1个管部23形成的喷流孔24的数量并不特别受到限定,例如大于或等于5个而小于或等于10个。在一对喷流管20中的一者形成的多个喷流孔24与基材a的一个面相对。在一对喷流管20中的另一者形成的多个喷流孔24与基材a的另一个面相对。来自多个喷流孔24的镀敷液25朝向基材a的表面喷出。
接下来,对本实施方式所涉及的连续镀敷装置100的作用效果进行说明。
如果基材a的张力变大,则基材a的拉应力变大。相反地,如果基材a的张力变小,则基材a的拉应力变小。即,如果基材a的张力不同,则基材a的拉应力变化。如果基材a的拉应力的波动大,则在基材a形成的镀敷膜的品质的波动也变大。
本实施方式所涉及的连续镀敷装置100具有第1控制部54,该第1控制部54基于由第1位置传感器53检测出的第1可动辊33的第1位置信息对放卷机4的放出速度进行控制。由此,能够对基材a的张力进行控制。其结果,能够抑制基材a的拉应力大幅地变化。因此,能够降低在基材a形成的镀敷膜的品质的波动。
另外,本实施方式所涉及的连续镀敷装置100也可以具有:第1可动部34,其载置有第1可动辊33;第1线36,其安装于第1可动部34;以及第1重物部37,其安装于第1线36。由此,能够以恒定的力将第1可动辊33拉拽。其结果,在基材a的张力变化时,第1可动辊33的位置变化。通过基于第1可动辊33的第1位置信息对放卷机4的放出速度进行控制,从而能够高精度地对基材a的张力进行控制。
并且,本实施方式所涉及的连续镀敷装置100可以具有第2可动辊43、第2位置传感器63和第2控制部64。第2可动辊43在基材a的行进方向上配置于放卷机4和镀敷区域2之间,且随动于基材a的移动而旋转。第2位置传感器63对第2可动辊43的位置进行检测。第2控制部64能够基于由第2位置传感器63检测出的第2可动辊43的第2位置信息,对卷绕机5的卷绕速度进行控制。由此,能够对基材a的张力进行控制。其结果,能够抑制下述情况,即,基材a的张力过度地变大而基材a伸长,由此形成于基材a的镀敷膜发生龟裂。因此,能够提高在基材a形成的镀敷膜的品质。
并且,本实施方式所涉及的连续镀敷装置100可以具有:第2可动部44,其载置有第2可动辊43;第2线46,其安装于第2可动部44;以及第2重物部47,其安装于第2线46。由此,能够以恒定的力将第2可动辊43拉拽。其结果,在基材a的张力变化时,第2可动辊43的位置变化。通过基于第2可动辊43的第2位置信息对卷绕机5的卷绕速度进行控制,从而能够高精度地对基材a的张力进行控制。
应该认为本次公开的实施方式在所有方面都是例示,且并不是限制性的内容。本实用新型的范围不是由上述的说明表示,而是由实用新型的权利要求书表示,包含与实用新型的权利要求书等同的含义以及范围内的全部变更。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。