本发明涉及基板保持装置。
背景技术:
在处理晶圆等基板的基板处理装置中,具备保持基板并进行运输等的基板保持装置(例如参照专利文献1)。专利文献1所记载的基板保持装置具备:吸引部,能够吸引基板的表面或者背面并保持;以及定位部,能够定位所吸引的基板。
专利文献1:日本特开2019-21725号公报。
近年来,存在作为基板,采用较大的尺寸的基板的情况。为了通过吸引大型的基板进行支承,需要增加吸引部的数量、或者增大各吸引部中的吸引力。另外,也考虑不吸引基板,而是伴随着基板边缘部中的接触来把持基板。然而,在基板为大型的情况下或者基板柔软的情况下等,存在在把持基板的边缘部并运输时基板的中央侧区域垂下,基板表面与基板保持装置或者其它结构接触而导致损伤等的担忧。对于这些情况,考虑通过把持基板的边缘部并且吸引基板的中央侧区域,来保持基板。然而,在基板柔软的情况下,担心在把持基板并运输基板时,基板起伏与基板保持装置或者其它结构接触。另外,根据基板也存在较大地翘曲的情况。若想要通过把持并且吸引较大地翘曲的基板来保持,则存在无法适当地把持边缘部的情况。另外,也存在吸引部与基板的距离偏离适当距离而无法适当地吸引基板的情况、基板与吸引部接触基板损伤的担忧。
技术实现要素:
本发明是鉴于上述的情况而完成的,其目的在于提供能够适当地保持基板的基板保持装置。
根据本发明的一个实施方式,提出用于保持基板的基板保持装置,上述基板具有:暴露于电镀液的被电镀部以及作为上述被电镀部的外侧区域的边缘部。上述基板保持装置具备:把持模块,用于通过与基板的上述边缘部接触来把持基板;吸引模块,用于吸引并保持基板的上述被电镀部;以及凸部,设置于基板中的与上述被电镀部对应的位置,比上述吸引模块向被上述基板保持装置保持的基板突出。
根据本发明的另一实施方式,提出用于保持基板的基板保持装置。上述基板保持装置具备:把持模块,用于通过与基板的边缘部接触来把持基板;吸引模块,用于吸引并保持基板的第一板面;以及凸部,设置于比上述吸引模块的吸引位置靠近与上述第一板面中的中央侧对应的位置,比上述吸引模块向被上述基板保持装置保持的基板突出。
附图说明
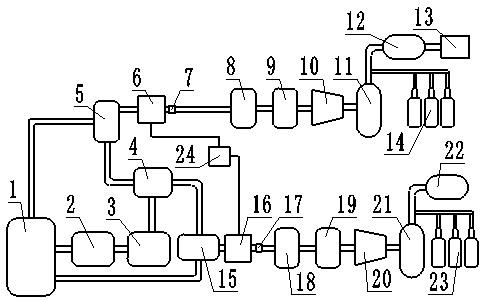
图1是本发明的一个实施方式的基板处理装置的整体配置图。
图2是表示配置于装载/卸载部内的基板运输装置的一个例子的示意俯视图。
图3是表示配置于装载/卸载部内的基板运输装置的一个例子的示意侧面图。
图4是从上方观察第一实施方式的机械手的立体图。
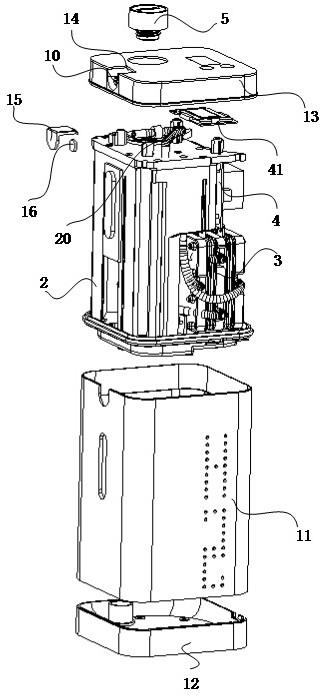
图5是从下方观察第一实施方式的机械手的立体图。
图6是表示由第一实施方式的把持模块进行的基板的把持的一个例子的图。
图7是示意性地表示本实施方式中的基板的板面的图。
图8是表示凸部相对于作为保持对象的基板的位置的一个例子的图。
图9是用于对由本实施方式的机械手进行的基板的保持以及运输进行说明的示意图。
图10是用于对由本实施方式的机械手进行的基板的保持以及运输进行说明的示意图。
图11是用于对由本实施方式的机械手进行的基板的保持以及运输进行说明的示意图。
图12是用于对解除由本实施方式的机械手进行的基板的保持进行说明的示意图。
图13是用于对解除由本实施方式的机械手进行的基板的保持进行说明的示意图。
图14是用于对解除由本实施方式的机械手进行的基板的保持进行说明的示意图。
图15是从下方观察第二实施方式的机械手的立体图。
图16是表示由第二实施方式的把持模块进行的基板的把持的一个例子的图。
图17是表示凸部相对于作为保持对象的基板的位置的一个例子的图。
附图标记说明:
25…盒台;25a…盒;26…基板配置调整机构;27…基板运输装置;29…基板装卸机构;37…基板支架运输装置;50…清洗装置;52、52a…吸引模块;522…伯努利吸附垫;54、54a…把持模块;542…钩子;544…致动器;546…夹持体;548…致动器;56、56a…座体;60、60a…凸部;100…电镀装置;110…卸载部;120…处理部;156、156a…机械手(基板保持装置);175…控制器;175a…cpu;175b…存储器;175c…控制部;s…基板;s1…边缘部;s2…被电镀部;ls…刻痕线。
具体实施方式
以下,参照附图对本发明的一个实施方式进行说明。其中,所使用的附图是示意图。因此,图示出的部件的大小、位置以及形状等可能与实际的装置的大小、位置以及形状等不同。另外,在以下的说明以及以下的说明所使用的附图中,对于可以同样地构成的部分,使用相同的附图标记,并且省略重复的说明。
图1是使用本发明的一个实施方式的基板保持装置的电镀装置的整体配置图。在本实施方式中,对在电镀装置中利用基板保持装置的例子进行说明,但基板保持装置也可以利用于研磨装置、研削装置、成膜装置、蚀刻装置等其它基板处理装置中。
电镀装置100大致分为:装载/卸载部110,将基板(被处理物)装载到基板支架(未图示),或者从基板支架上卸载基板;处理部120,处理基板s;以及清洗部50a。处理部120还包含:前处理/后处理部120a,进行基板的前处理以及后处理;以及电镀处理部120b,对基板进行电镀处理。此外,基板s包括:方形基板、圆形基板。另外,方形基板包括:矩形等多边形的玻璃基板、液晶基板、印刷电路基板、其它多边形的被处理物。圆形基板包括:半导体晶圆、玻璃基板、其它圆形的被处理物。
装载/卸载部110具有:基板配置调整机构26、基板运输装置27以及基板装卸机构29。作为一个例子,在本实施方式中,装载/卸载部110具有2个基板配置调整机构26,包括:装载用的基板配置调整机构26a,对处理前的基板s进行处理;以及卸载用的基板配置调整机构26b,对处理后的基板s进行处理。在本实施方式中,装载用的基板配置调整机构26a和卸载用的基板配置调整机构26b的结构相同,相互方向相差180°来配置。此外,基板配置调整机构26并不限定于设置装载用的基板配置调整机构26a和卸载用的基板配置调整机构26b,也可以分别不区分装载用、卸载用来使用。另外,在本实施方式中,装载/卸载部110具有2个基板装卸机构29。2个基板装卸机构29是相同的机构,使用空闲的一个基板装卸机构29(未处理基板s的基板装卸机构29)。此外,可以根据电镀装置100中的空间,分别设置一个或者三个以上基板配置调整机构26和基板装卸机构29。
基板配置调整机构26(装载用的基板配置调整机构26a)通过机器人24从多个(作为一个例子,在图1中为3个)盒台25运输基板s。盒台25具备收容基板s的盒25a。盒例如是箍环。基板配置调整机构26构成为调整(对准)所载置的基板s的位置以及朝向。基板装卸装置290配置于基板装卸机构29,构成为将基板s装卸于基板支架。另外,在基板装卸机构29的附近设置储料器30,上述储料器30用于收容基板支架。在基板配置调整机构26与基板装卸机构29之间,配置有在这些单元间运输基板的基板运输装置27。基板运输装置27构成为在基板配置调整机构26、基板装卸机构29以及清洗装置50之间运输基板s。
清洗部50a具有清洗装置50,上述清洗装置50清洗电镀处理后的基板,并使清洗后的基板干燥。基板运输装置27构成为将电镀处理后的基板运输至清洗装置50,并将清洗后的基板从清洗装置50取出。而且,将清洗后的基板通过基板运输装置27传递至基板配置调整机构26(卸载用的基板配置调整机构26b),并通过机器人24返回到盒25a。
前处理/后处理部120a具有:预湿槽32、预浸槽33、预漂洗槽34、鼓风槽35以及漂洗槽36。在预湿槽32中,将基板浸渍于纯水。在预浸槽33中,蚀刻去除形成于基板的表面的种子层等导电层的表面的氧化膜。在预漂洗槽34中,将预浸泡后的基板与基板支架一起利用清洗液(纯水等)清洗。在鼓风槽35中,进行清洗后的基板的排干。在漂洗槽36中,将电镀后的基板与基板支架一起利用清洗液清洗。此外,该电镀装置100的前处理/后处理部120a的结构是一个例子,并不对电镀装置100的前处理/后处理部120a的结构进行限定,可以采用其它结构。
电镀处理部120b具有多个电镀槽39,该电镀槽39具备溢流槽38。各电镀槽39在内部收纳一个基板,使基板浸渍于内部所保持的电镀液中在基板表面进行镀铜等电镀。在这里,对于电镀液的种类并未特别限定,可根据用途使用各种电镀液。
电镀装置100位于这些各设备的侧方,在这些各设备之间连同基板一起运输基板支架,例如具有采用线性马达方式的基板支架运输装置37。该基板支架运输装置37构成为在基板装卸机构29、储料器30、预湿槽32、预浸槽33、预漂洗槽34、鼓风槽35、漂洗槽36以及电镀槽39之间运输基板支架。
包含如以上那样构成的电镀装置100的电镀处理系统具有控制器175,上述控制器175构成为控制上述各部。控制器175具有:存储器175b,储存有各种设定数据以及各种程序;cpu175a,执行存储器175b的程序;以及控制部175c,通过cpu175a执行程序来实现。构成存储器175b的记录介质能够包含一个或者多个rom、ram、硬盘、cd-rom、dvd-rom、软盘等任意的记录介质。存储器175b所储存的程序例如包括:进行基板配置调整机构26的控制的程序、进行基板运输装置27的运输控制的程序、进行基板装卸机构29中的基板向基板支架的装卸控制的程序、进行基板支架运输装置37的运输控制的程序、进行各电镀槽39中的电镀处理的控制的程序。另外,控制器175构成为能够与未图示的上位控制器通信,而能够与上位控制器所具有的数据库之间进行数据的交换,其中,上述上位控制器统一控制电镀装置100以及其他相关装置。
图2、图3是表示配置于装载/卸载部110内的基板运输装置27的一个例子的图。该基板运输装置27具有:自由伸缩的一对机械臂152、154,配置于机器人主体150的上方;以及机械手156、158,安装于该各机械臂152、154的前端。而且,作为该一个机械手156,使用干燥规格且薄型的吸附型的结构(干手)。作为另一个机械手158,使用湿规格且厚型的落入型的结构(湿手)。
如上所述,该基板运输装置27在基板配置调整机构26、基板装卸机构29以及清洗装置50之间运输基板s,由于干基板和湿基板混合存在,所以采用这样的干燥规格的机械手156和湿规格的机械手158。换句话说,对于从基板配置调整机构26(装载用的基板配置调整机构26a)向基板装卸机构29的运输、以及从清洗装置50向基板配置调整机构(卸载用的基板配置调整机构26b)的运输而言,由于基板为完全干燥状态,所以使用干燥规格的机械手156(基板保持装置)。对于从基板装卸机构29向清洗装置50的运输而言,由于基板是湿状态,所以使用湿规格的机械手158。
(第一实施方式)
对机械手156的详细内容进行说明。此外,在本实施方式中,作为基板保持装置的一个例子,对干燥规格的机械手156进行说明。但是,对于湿规格的机械手158,也可以构成为与以下说明的机械手156相同。图4是从上方观察本实施方式的机械手156的立体图,图5是从下方观察本实施方式的机械手156的立体图。在本实施方式中,机械手156构成为从上方保持基板s。但是,并不限定于这样的例子,作为一个例子,机械手156也可以构成为从下方保持基板s。本实施方式的机械手156具有:座体56、用于保持基板s的把持模块54、以及用于吸引并保持基板s的表面或者背面的吸引模块52、以及设置于座体56的凸部60。
座体56具有:板状的板部562,包含向机械臂152的安装部;以及棒状的框架部564,与板部562连接。在本实施方式中,为了轻型化,将板部562分成2个部件562a、562b。2个部件562a、562b分别相互分离地安装于机械臂152。板部562整体构成4个角被切掉的矩形状的前端部,基板s面向该前端部被保持。板部562的2个部件562a、562b通过框架部564连接。框架部564具有:平行的3根短轴部564a~564c、和长轴部564d,其中,短轴部564a~564c分别连接板部562的2个部件562a、562b,长轴部564d与短轴部564a~564c垂直地延伸,连接短轴部564a~564c中的每一个的中央。此外,座体56并不限定于这样的形状,可以根据作为保持对象的基板的形状来选择。
把持模块54构成为伴随着与基板s的接触,把持基板s的边缘部s1。在这里,对本实施方式中的基板s进行说明。图7是示意性地表示本实施方式中的基板s的表面(第一板面)的图。此外,在图7中,用点划线表示基板s的刻痕线ls。在本实施方式中,基板s是方形基板,如上所述在处理部120中,实施电镀处理。此时,基板s以被未图示的基板支架保持的状态被放入电镀槽39内。一般地,基板支架保持基板s的对置的2边或者4边,在电镀处理中通过设置于基板支架的电气接点向基板s(更为详细而言,向形成于基板s表面的种子层)供电。基板s在未被基板支架保持的区域,而且通过基板支架的开口,暴露于电镀液。在图7中,对基板s的表面(第一板面)中的被基板支架保持的区域亦即边缘部s1标注有阴影线,并用白色(未标注阴影线)示出边缘部的内侧亦即暴露于电镀液的被电镀部s2。换言之,基板s具有:被电镀部s2,暴露于电镀液;以及边缘部s1亦即被电镀部s2的外侧区域。被电镀部s2可以仅处于基板s的表面(第一板面)或者背面(第二板面),也可以处于基板s的表面(第一板面)以及背面(第二板面)两方。基板s的边缘部s1具有:基板s的表面(第一板面)的周边部、未图示的背面(第二板面)的周边部、以及侧面。而且,如上所述,把持模块54构成为通过与边缘部s1接触来把持基板s。
在本实施方式中,把持模块54安装于座体56(在图4以及图5所示的例子中为板部562)。把持模块54具有:钩子542,能够把持基板s的边缘部s1表面;以及致动器544,使钩子542工作。作为一个例子,在图4以及图5所示的例子中,对于基板s的4边中的每一边各在2处设置有钩子542和致动器544。但是,钩子542的个数以及位置可以基于基板s的尺寸等适当地决定。另外,作为一个例子,也可以在座体56,在与基板s的边缘部s1对应的位置设置有把持凸部566。把持凸部566从座体56向作为保持对象的基板s侧突出。图6是表示由本实施方式的把持模块54进行的基板s的把持的一个例子的图。如图6所示,钩子542可以围绕固定于座体56的摆动轴542a摆动。钩子542的一端侧(在图6中,为上方)与致动器544连接,另一端侧(在图6中,为下方)具有爪部542b。作为一个例子,致动器544是能够利用来自未图示的气体源的工作气体使钩子542摆动的气缸。但是,作为致动器544,能够采用马达、螺线管等使用各种动力源的结构。在图6所示的例子中,通过钩子542顺时针摆动,爪部542b朝向座体56移动,而座体56(把持凸部566)和爪部542b与基板s的边缘部s1的表面(第一板面)以及背面(第二板面)接触,能够把持基板s的边缘部s1(在图6中,参照实线)。另外,通过钩子542逆时针摆动,爪部542b远离座体56移动,来解除由把持模块54进行的基板s的把持(在图6中,参照虚线)。通过像这样使钩子542摆动使爪部542b沿圆弧状移动,在基板s具有翘曲的情况下,也能够适当地把持基板s的边缘部s1。但是,把持模块54只要构成为通过与基板s的边缘部s1接触来把持基板s即可,并不限定于图4~图6所示的结构。
再次参照图4以及图5。吸引模块52为了与基板s的板面非接触地保持基板s而设置的,构成为吸引基板s的被电镀部s2。在本实施方式中,吸引模块52具有伯努利吸附垫522。在图4以及图5所示的例子中,在座体56(框架部564)安装有2个伯努利吸附垫522。但是,吸引模块52也可以具有一个、或者三个以上的伯努利吸附垫。伯努利吸附垫522与未图示的气体源连接。作为一个例子,伯努利吸附垫522与和把持模块54中的气缸(致动器544)相同的气体源连接。伯努利吸附垫522也被称为伯努利吸盘,通过向基板s的板面喷出气体,来吸引接受喷出的气体的基板s的板面。此外,作为吸引基板s的板面的机构,吸引模块52也可以代替伯努利吸附垫522、或者除了伯努利吸附垫522以外,具有与负压源连接的真空吸盘。
在座体56,在与基板s的被电镀部s2对应的位置设置有凸部60。在机械手156保持基板s时,凸部60以与基板s的被电镀部s2接触的方式,从座体56向基板s侧突出。另外,凸部60从座体56比伯努利吸附垫522(吸引模块52)突出,防止基板s接触吸引模块52。优选凸部60固定于座体56,距离座体56的前端的高度不变化。凸部60的前端可以与设置于与基板s的边缘部s1对应的位置的把持凸部566的前端相同的高度。换言之,凸部60的前端和把持凸部566的前端可以位于同一平面上。由此,在凸部60和把持凸部566与基板s接触时,能够将基板s的板面维持为平坦。优选凸部60由防带电材料形成,作为一个例子,能够使用超高分子量聚乙烯(uhmwpe)。另外,优选凸部60的前端形成为半球状等曲面状,以不损伤基板s的板面。
图8是表示凸部60相对于作为保持对象的基板s的位置的一个例子的图。在图8中,对基板s的边缘部s1标注阴影线,并且对被电镀部s2中的刻痕线ls标注有其它阴影线。另外,在图8中,用空心的圆示出凸部60相对于基板s的位置,用虚线示出吸引模块52的吸引位置(伯努利吸附垫522)。如图5以及图8所示,在本实施方式中,在座体56设置有多个(在图5以及图6所示的例子中为8个)凸部60。凸部60中的至少一个、或者凸部60中的至少一部分可以设置于比吸引被电镀部s2的吸引模块52中的吸引位置(伯努利吸附垫522)靠近与基板s板面的中央侧对应的位置。特别是,凸部60中的至少一个可以配置于连结吸引模块52中的吸引位置和与基板s板面的中央对应的位置的区域。此外,在存在多个吸引模块52的吸引位置的情况下,凸部60中的至少一个、或者凸部60中的至少一部分可以设置于比吸引模块52的吸引位置中的至少一个位置靠与基板s板面的中央侧对应的位置。另外,优选将凸部60设置于比把持模块54的把持位置(钩子542)更接近吸引模块52的吸引位置(伯努利吸附垫522)的位置。此外,作为一个例子,基板s板面的“中央”相当于在方形基板中距离对置的2边的距离相等的点、或者基板s板面的重心。
另外,如图8所示,在基板s具有刻痕线ls的情况下,优选将凸部60配置为与刻痕线ls接触。在这里,刻痕线ls是设置于形成于基板s的图案与图案之间的“空白”,是也被称为间隔的区域。通过像这样将凸部60配置为与刻痕线ls接触,能够抑制基板s中的重要度较高的区域损伤。另外,基板s并不局限于刻痕线,存在被电镀部s2具有重要度相对较高的区域、和重要度相对较低的区域的情况。在这样的基板s中,凸部60可以以与被电镀部s2中的重要度相对较低的区域接触的方式,设置于座体56。
对利用机械手156的基板s的保持以及运输的一个例子进行说明。图9~图11是用于对由本实施方式的机械手156进行的基板s的保持以及运输进行说明的示意图。此外,在图9~图11、以及后述的图12~图14中,为了便于理解,对基板s标注有阴影线。首先,如图9所示,机械手156移动到配置有作为保持对象的基板s的场所(例如基板配置调整机构26)。由于本实施方式的机械手156构成为从上方保持基板s,所以移动到基板s的上方。在这里,在图9中,作为一个例子基板s具有翘曲。接着,机械手156为了保持基板s,而朝向基板s移动(在图9中,参照箭头)。此时,如图10所示,可以以接近支承面直到与支承基板s的支承面的距离为基板s的厚度左右的方式控制机械手156。通过机械手156接近支承面,座体56的凸部60以及把持凸部566接触基板s。如上所述,在本实施方式的机械手156中,凸部60的前端和把持凸部566的前端为同一平面上。因此,通过机械手156移动到与支承面的距离为基板s的厚度左右,在基板s具有翘曲的情况下,也能够使基板s成为平坦的状态。接着,机械手156通过利用把持模块54把持基板s并且利用吸引模块52吸引基板s来保持基板s。在本实施方式中,由于通过把持模块54与基板s的边缘部s1接触来把持基板s,所以机械手156能够可靠地保持基板s。另外,由于吸引模块52吸引基板s的被电镀部s2,所以能够抑制在运输中基板s的被电镀部垂下等。进一步,由于机械手156在与基板s的被电镀部s2对应的位置具有比吸引模块52突出的凸部60,所以能够将基板s和吸引模块52维持在适当的距离。由此,能够防止基板s接触吸引模块52(伯努利吸附垫522),并且能够适当地使吸引力作用于基板s的板面。而且,如图11所示,机械手156能够保持基板s并向所希望的场所运输。
图12~图14是用于对解除由本实施方式的机械手156进行的基板s的保持进行说明的示意图。如图12所示,机械手156若把持基板s移动至运输目的地(例如基板装卸机构29),则为了将基板s配置于运输目的地的支承体而朝向支承体移动(在图12中,参照箭头)。如上所述,本实施方式的机械手156能够将基板s维持在平坦的状态运输,如图13所示,能够以平坦的状态将基板s配置于支承体。若将基板s配置于支承体,则机械手156解除由把持模块54进行的对基板s的边缘部s1的把持、以及由吸引模块52进行的基板s的吸引(在图13中,参照箭头)。由此,解除由机械手156进行的基板s的保持。而且,如图14所示,通过机械手156以远离支承体的方式移动,基板s的运输完成。
(第二实施方式)
图15是从下方观察第二实施方式的机械手(基板保持装置)156a的立体图。第二实施方式的机械手156a与第一实施方式的机械手156相同,构成基板运输装置27。此外,第二实施方式的机械手156a与上述的第一实施方式的机械手156相同,构成为保持参照图7说明的方形基板s。第二实施方式的机械手156a具有:座体56a、用于把持基板s的把持模块54a、用于吸引并保持基板s的表面或者背面的吸引模块52a、以及设置于座体56a的凸部60。
座体56a包括板状的部件,上述板状的部件包括向机械臂152的安装部,且座体56a形成有用于轻型化的多个开口(减轻重量)。座体56a的形状可以根据作为保持对象的基板s的形状适当地选择。
把持模块54a安装于座体56a。作为一个例子,在图16所示的例子中,在基板s的4边中的每一边各在2处设置有把持模块54a。然而,把持模块54a的个数以及位置可以基于基板s的尺寸等适当地决定。另外,也可以与第一实施方式相同,在座体56a,在与基板s的边缘部s1对应的位置设置有把持凸部566。在上述的第一实施方式中的把持模块54中,钩子542与基板s的边缘部s1表面(第一板面)或者背面(第二板面)接触。代替于此,第二实施方式的把持模块54a构成为通过与基板s的侧面接触,来把持基板s的边缘部s1。图16是表示第二实施方式的把持模块54a的基板s的把持的一个例子的图。如图16所示,把持模块54a具有:夹持体546,能够把持基板s的边缘部s1;以及致动器548,使夹持体546工作。夹持体546能够围绕固定于座体56a的摆动轴546a摆动。夹持体546的一端侧(在图16中,为上方)与致动器548连接,在另一端侧(在图16中,为下方)具有接触部546b。接触部546b在前端具有凸缘部,以能够防止被机械手156a保持的基板s脱落。另外,接触部546b经由弹簧546c与摆动轴546a连接。作为一个例子,致动器548是能够利用来自未图示的气体源的工作气体使夹持体546摆动的气缸。但是,作为致动器548,能够采用马达、螺线管等使用各种动力源的结构。在图16所示的例子中,通过夹持体546顺时针摆动而接触部546b朝向内侧移动,接触部546b能够与基板s的侧面接触把持基板s的边缘部s1(在图16中,参照实线)。此时,由于夹持体546具有弹簧546c,所以能够以适当的力保持基板s。另外,通过夹持体546逆时针摆动而接触部546b朝向外侧移动,可解除由把持模块54a进行的基板s的把持(在图16中,参照虚线)。但是,把持模块54a只要构成为通过与基板s的边缘部s1接触来把持基板s即可,可以采用第一实施方式的把持模块54,也可以采用其它机构。
再次参照图15。吸引模块52a为了以与基板s的板面非接触地保持基板s而设置,构成为吸引基板s的被电镀部s2。在本实施方式中,与第一实施方式相同,吸引模块52具有伯努利吸附垫522。在图15所示的例子中,在座体56a安装有8个伯努利吸附垫522。但是,吸引模块52a也可以具有1~7个、或者9个以上的伯努利吸附垫。另外,吸引模块52a也可以代替伯努利吸附垫522、或者除了伯努利吸附垫522以外,具有与负压源连接的真空吸盘。
在座体56a,在与基板s的被电镀部s2对应的位置设置有凸部60a。凸部60a比伯努利吸附垫522(吸引模块52)从座体56a向基板s侧突出。优选凸部60a固定于座体56a,其高度不变化。凸部60a的前端也可以为与把持凸部566的前端相同的高度。优选凸部60a由防带电材料形成,作为一个例子,能够使用超高分子量聚乙烯(uhmwpe)。
图17是表示凸部60a相对于作为保持对象的基板s的位置的一个例子的图。在图17中,对基板s的边缘部s1标注阴影线,并且对被电镀部s2中的刻痕线ls标注有其它阴影线。另外,在图17中,用空心的长方形示出凸部60a相对于基板s的位置,用虚线示出吸引模块52a的吸引位置(伯努利吸附垫522)。如图16以及图17所示,在本实施方式中,在座体56a设置有多个(在图16以及图17所示的例子中为4个)凸部60a。在第二实施方式中,凸部60a为沿着基板s的板面较长的棒状的部件。凸部60a的前端可以为横剖面为半圆状等曲面状。此外,凸部60、60a的形状并不限定于图4、图5、图8、图16以及图17所示的形状,可以基于基板s的形状以及尺寸等适当地确定。如图17所示,凸部60a设置于与被电镀部s2对应的位置。在这里,凸部60a中的至少一部分可以设置于比吸引模块52中的吸引位置(伯努利吸附垫522)靠与基板s板面的中央侧对应的位置。此外,在存在多个吸引模块52的吸引位置的情况下,可以将凸部60中的至少一个(或者一部分)设置于比吸引模块52的吸引位置中的至少一个位置靠与基板s板面的中央侧对应的位置。另外,如图17所示,在基板s具有刻痕线ls的情况下,优选凸部60a配置为与刻痕线ls接触。
在这样的第二实施方式的机械手156a中,能够与第一实施方式的机械手156相同地保持基板s,并能够起到同样的效果。
以上说明的本实施方式也能够记载为以下的方式。
[方式1]根据方式1,提出用于保持基板的基板保持装置,上述基板具有:被电镀部,暴露于电镀液;以及边缘部,为上述被电镀部的外侧区域,上述基板保持装置具备:把持模块,用于通过与基板的上述边缘部接触来把持基板;吸引模块,用于吸引并保持基板的上述被电镀部;以及凸部,是设置于上述基板保持装置的座体的凸部,上述凸部设置于基板中的与上述被电镀部对应的位置,比上述吸引模块从上述座体突出。根据方式1的基板保持装置,能够适当地保持基板。
[方式2]根据方式2,提出用于保持基板的基板保持装置,上述基板保持装置具备:把持模块,用于通过与基板的边缘部接触来把持基板;吸引模块,用于吸引并保持基板的第一板面;以及凸部,是设置于上述基板保持装置的座体的凸部,上述凸部设置于比上述吸引模块的吸引位置靠近与上述第一板面中的中央侧的对应的位置,比上述吸引模块从上述座体突出。根据方式2的基板保持装置,能够适当地保持基板。
[方式3]根据方式3,在方式1或者方式2中,上述凸部配置为与基板的刻痕线接触。根据方式3,能够防止基板中的重要度较高的区域损伤。
[方式4]根据方式4,在方式1~3中,上述凸部的前端是曲面状。根据方式4,通过凸部能够抑制基板损伤。
[方式5]根据方式5,在方式1~4中,上述凸部由防带电材料形成。根据方式5,通过凸部能够抑制基板损伤。
[方式6]根据方式6,在方式1~5中,上述凸部设置于比上述把持模块的把持位置更接近上述吸引模块的吸引位置的位置。根据方式6,能够使设置吸引模块与基板的距离更加适当。
[方式7]根据方式7,在方式1~6中,上述凸部固定于上述座体。
[方式8]根据方式8,在方式1~7中,上述吸引模块是真空吸盘或者伯努利吸盘。
本申请主张基于2020年2月20日申请的日本专利申请号第2020-27355号的优先权。通过参照将包括日本专利申请号第2020-27355的说明书、权利要求书、附图以及摘要的全部公开内容整体引用至本申请。通过参照将日本特开2019-21725公报(专利文献1)的全部公开整体引用至本申请。
以上,对本发明的几个实施方式进行了说明,但上述的发明的实施方式是用于便于理解本发明的方式,并不限定本发明。本发明当然可以不脱离其主旨地进行变更、改进,并且其等价物包含于本发明。另外,可以在能够解决上述的课题的至少一部分的范围、或者起到效果的至少一部分的范围内,进行权利要求书以及说明书所记载的各构成要素的任意组合、或者省略。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。