本发明涉及一种根据权利要求1前序部分所述的用于双辙车辆车桥的车轮悬架组件。
背景技术
这种车轮悬架组件具有承载车轮的轮毂托架,轮毂托架通过多连杆组件铰接至车辆的副车架或车桥托架上。副车架又通过副车架支承件连接至车辆车身(例如车身纵梁)。
在车辆驶过沟坎或加速或制动时,纵向力会作用到车轮上。在纵向弹簧舒适性方面,现有技术中将副车架与车身相连的副车架支承件被设计成在车辆纵向上具有更高的纵向弹性可变形性/屈从性/柔性,以便承受作用在车轮上的纵向力。在此,在梯形控制臂车桥的情况下,在现有技术中还额外地使梯形控制臂转动和/或使梯形控制臂在车辆纵向上纵向移动纵向距离。在上述情况下,梯形控制臂纵向距离尤其是通过在位于车辆内部的梯形控制臂支承件上的止挡件而受到限制。
如果电驱动上述针对纵向弹簧舒适性而设计的车桥,则得到下述情况:电机因此能够安装在副车架上或者能够靠近车轮地安装在车轮悬架组件的梯形控制臂上,并且通过驱动轴与车轮传动连接。在此情况下,在有纵向力作用到车轮上时,由于副车架和/或梯形控制臂的纵向移位,会导致所不期望的电机振动。
文本DE 10 2011 055 704 A1公开了一种用于机动车的本类型的多连杆后轮轴,其具有梯形控制臂。由文本DE 694 12 909 T2也公开了一种具有梯形控制臂的车轮悬架组件。
技术实现要素:
本发明的目的是,提供一种具有非常高的纵向舒适度的车轮悬架组件。此外,该车轮悬架组件还应在电驱动的车桥的情况下避免基于电机质量的不期望的振动。
该目的通过权利要求1的特征实现。本发明的优选改进方案在从属权利要求中公开。
本发明基于一种车轮悬架组件,其轮毂托架通过多连杆组件铰接至车身。该多连杆组件具有被设计为四点连杆的梯形控制臂,该梯形控制臂具有两个在车身侧的连接点和两个在轮毂托架侧的连接点。根据特征部分,在轮毂托架侧的连接点被设计成比在车身侧的连接点具有更大的纵向弹性可变形性,即刚度更低错位。因此在纵向力作用到车轮上时,轮毂托架参照梯形控制臂(本身并不大幅纵向移位)沿车辆纵向移位纵向行程。基于在轮毂托架方面的目前更大的纵向可变形性使副车架支承件可以被设计得更加刚性。特别是在车桥与电机相组合时,得到下述优点:电机能够被布置在副车架上或在靠近车轮支承时布置在梯形控制臂上。根据本发明,因此在纵向力作用到车轮上时,由于目前更加刚性的副车架支承件和/或在车身侧的梯形控制臂,副车架或梯形控制臂不发生纵向运动或仅发生最小程度的纵向运动。相应地,安装在副车架上或梯形控制臂上的电机也不发生纵向运动,由此在行驶运行中不会出现或明显减小了所不期望的振动。
在技术实施中,多连杆组件通过在车身侧的连接点铰接在副车架上。副车架又通过副车架支承件连接至车身(例如车身纵梁)。副车架或梯形控制臂可以承载有电机,电机通过驱动轴与车轮传动连接。根据本发明,相比于在轮毂托架侧的梯形控制臂连接点,副车架支承件以及多连杆组件在车身侧的连接点沿车辆纵向被实施成,由在轮毂托架侧的连接结构产生大部分的纵向可变形性。
多连杆组件除了具有梯形控制臂外还可以具有正好三个另外的车轮控制臂。这些车轮控制臂可以尤其是被设计为分别具有在车身侧的连接点和在轮毂托架侧的连接点的两点连杆。这三个另外的车轮控制臂可以优选被实现为横向控制臂,该横向控制臂与车辆横向方向齐平地延伸/沿车辆横向方向/平行于车辆横向方向延伸。多连杆组件在车身侧和在轮毂托架侧的所有连接点都可以被实现为具有与车辆纵向方向齐平的/平行于车辆纵向方向的摆动轴线的摆动支承件。
三个另外的车轮控制臂可以在纵向力施加到车轮上时规定轮毂托架运动。这主要涉及轮毂托架的纵向移位,并且与轮毂托架的轻微的内倾转动和外倾转动叠加。
在具体实施变型方案中,梯形控制臂可以与车辆下方的车轮控制臂一起布置在下方的连杆平面中。在下方的连杆平面中,下方的车轮控制臂以自由的竖直错位/偏差定位在梯形控制臂下方。因此,下方的车轮控制臂在轮毂托架侧的连接点可以经由竖直错位布置在轮毂托架侧的梯形控制臂连接点的下方。
在上方的连杆平面中可以布置有车辆的前上方的车轮控制臂和车辆的后上方的车轮控制臂。前上方的车轮控制臂在轮毂托架侧的连接点和车辆的靠前的梯形控制臂连接点可以在行驶方向上布置在车轮转轴前方。与之相比,下方的车轮控制臂以及车辆的后上方的车轮控制臂在轮毂托架侧的连接点以及车辆的靠后的梯形控制臂连接点可以布置在车轮转轴后方。
在本发明的一种改进方案中,前上方的车轮控制臂在轮毂托架侧的连接点可以以纵向错位布置在轮毂托架侧的前方的梯形控制臂连接点前方。替代和/或附加于此,前上方的车轮控制臂在轮毂托架侧的连接点可以以高度错位布置在轮毂托架侧的、前方的梯形控制臂连接点上方。
后上方的车轮控制臂在轮毂托架侧的连接点可以以高度错位布置在轮毂托架侧的、后方的梯形控制臂连接点上方。替代和/或附加于此,后上方的车轮控制臂在轮毂托架侧的连接点可以以纵向错位布置在轮毂托架侧的、后方的梯形控制臂连接点前方。
在第一实施变型方案中,在轮毂托架侧的梯形控制臂连接点被实现为橡胶-金属-套筒支承件。为了限制轮毂托架纵向行程(在纵向力作用到车轮上时)可以在相应的橡胶-金属-套筒支承件中设置轴向作用的纵向止挡件。每个橡胶-金属-套筒支承件可以具有支承件内套筒、支承件外套筒和弹性体,限定摆动轴线的支承销穿过该支承件内套筒,支承件外套筒连接至梯形控制臂。弹性体可以将支承件内套筒和支承件外套筒相互连接。支承销可以支承在彼此对置的梯形控制臂的托架翼部中。
在第二实施变型方案中,在轮毂托架侧的梯形控制臂连接点可以不被实现为橡胶-金属-套筒支承件,而是分别利用耦联杆实现,经由耦联杆将梯形控制臂悬挂在轮毂托架上。每个耦联杆可以在下方的铰接部位处铰接在梯形控制臂上以及在上方的铰接部位处铰接到轮毂托架上。铰接部位可以是具有与车辆横向方向齐平的摆动轴线的摆动支承件。为了限制轮毂托架纵向行程,可以在梯形控制臂与轮毂托架之间连接弹簧阻尼元件。
附图说明
下面参考附图描述本发明的示例性实施例。
附图示出:
图1至图4示出根据第一实施例的用于双辙车辆的车桥的车轮悬架组件的不同视图;以及
图5和图6示出车轮悬架组件的第二实施例的其他视图。
具体实施方式
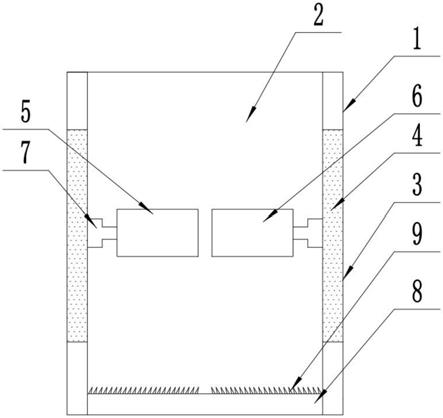
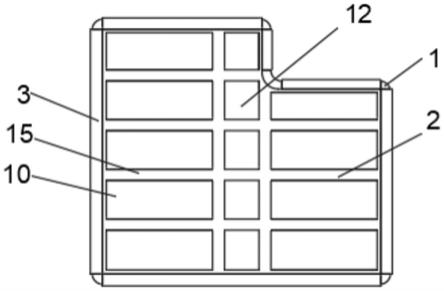
图1中示出双辙车辆的电驱动的后桥HA的左侧车轮悬架组件。图中未示出的右侧车轮悬架组件相对于车辆纵向中心平面镜像对称地设计。在图1中,车轮悬架组件具有承载着车轮2的轮毂托架1,轮毂托架通过多连杆组件3(仅在图2中示出)铰接到车身侧的副车架5上。在图1中,副车架5具有两个侧向的副车架纵梁7,对此在图1或图2中仅示出了其中一个。两个副车架纵梁7通过前方的和后方的副车架横梁9相互连接。在图2中,副车架5承载仅粗略示意性地由虚线表示的电机11。电机11通过驱动轴13与车轮2传动连接。副车架纵梁7利用在图1或图2中所示的前方的和后方的副车架支承件15连接至车身上。
如从附图中还可以看出,多连杆组件3具有被设计为四点连杆的梯形控制臂L1。该梯形控制臂与下方的车轮控制臂L3一起布置在下方的连杆平面中,下方的车轮控制臂L3以高度错位z3(图4)布置在梯形控制臂L1下方。在车轮悬架组件的上方的连杆平面中,设有前上方的车轮控制臂L2和后上方的车轮控制臂L4。梯形控制臂L1具有平坦的板状基体,悬架弹簧17和伸缩式减振器19支承在该基体上。梯形控制臂L1被实现为四点连杆,其在两个在车身侧的连接点21、23处铰接在副车架5上并且在两个在轮毂托架侧的连接点25、27处铰接在轮毂托架1上。在图1中,其他车轮控制臂L2、L3、L4被设计为两点连杆,其各自具有在车身侧的连接点和在轮毂托架侧的连接点29、31、33。三个车轮控制臂L2、L3、L4是与车辆横向方向y齐平地延伸的横向控制臂。多连杆组件3在车身侧和在轮毂托架侧的所有连接点在图中都被实施为具有与车辆纵向方向x齐平的摆动轴线Sx的摆动支承件。
下面详细说明连杆的布置方式:前上方的车轮控制臂L2的在轮毂托架侧的连接点29和车辆的两个前方的梯形控制臂连接点21、25在行驶方向FR上布置在车轮转轴D(图3)的前方。在图2和图3中,下方的车轮控制臂L3在轮毂托架侧的连接点31以及后上方的车轮控制臂L4在轮毂托架侧的连接点33布置在车轮转轴D的后方。
在图2中,前上方的车轮控制臂L2在轮毂托架侧的连接点29以纵向错位x2(图3)布置在轮毂托架侧的、前方的梯形控制臂连接点25前方。此外,前上方的车轮控制臂L2在轮毂托架侧的连接点29以高度错位z2(图2)定位在轮毂托架侧的、前方的梯形控制臂连接点25上方。
后上方的车轮控制臂L4在轮毂托架侧的连接点33以高度错位z4定位在轮毂托架侧的、后方的梯形控制臂连接点27的上方。此外,在轮毂托架侧的连接点33以纵向错位定位在轮毂托架侧的、后方的梯形控制臂连接点27的前方。
前方的、在车身侧和在轮毂托架侧的梯形控制臂连接点21、25大致与车辆横向方向y齐平地彼此并排布置。同样地,后方的、在车身侧和在轮毂托架侧的梯形控制臂连接点23、27彼此也横向齐平地并排定位。
在图1至图4的第一实施例中,在轮毂托架侧的梯形控制臂连接点25、27被实施为橡胶-金属-套筒支承件。在图4中,每个橡胶-金属-套筒支承件具有支承件内套筒35,限定摆动轴线S的支承销37穿过该支承件内套筒。支承销37分别拧接至轮毂托架的托架翼部39(图2)。橡胶-金属-套筒支承件被压入到梯形控制臂的外侧上的孔眼41中。
本发明的核心涉及的事实是:被实现为橡胶-金属-套筒支承件的在轮毂托架侧的梯形控制臂连接点25、27与在车身侧的梯形控制臂连接点21、23以及副车架支承件15相比被设计得具有更大的纵向弹性可变形性,即刚度更低。因此在行驶运行期间当纵向力作用到车轮2上时,轮毂托架1参照梯形控制臂1沿车辆纵向x移位纵向行程Δx(图2)。而梯形控制臂L1和副车架5则沿车辆纵向x不移位或仅小幅移位。为了限制该轮毂托架的纵向行程Δx,该橡胶-金属-套筒支承件具有轴向起作用的纵向止挡件。
通过三个车轮控制臂L2、L3和L4规定了在轮毂托架1的纵向行程Δx的范围上的纵向移位。在此,轮毂托架1的纵向移位可以与小幅的内倾转动或外倾转动叠加。
在图5或图6中示出了根据第二实施例的车轮悬架组件。图5或图6所示的车轮悬架组件的基本结构和功能与第一实施例的结构/功能基本相同。与图1不同的是,在第二实施例中,在轮毂托架侧的梯形控制臂连接点25、27并未实现为橡胶-金属-套筒支承件,而是分别设有耦联杆47、49。
在图5或图6中,两个耦联杆47、49大致竖直取向。每个耦联杆47、49分别在下方的铰接部位51处铰接在梯形控制臂L1上以及在上方的铰接部位53处铰接在轮毂托架1上。上方的和下方的铰接部位51、53被设计为具有与车辆横向方向y齐平的摆动轴线Sy的摆动支承件。为了限制轮毂托架的纵向行程Δx,在梯形控制臂L1的前方的悬臂55与轮毂托架1之间设置有弹簧阻尼元件57。
在图6中,电机11不支承在副车架5上,而是以靠近车轮支承的方式直接支承在梯形控制臂L1上,并且支承在前上方的连杆L2与后上方的连杆L4之间。
附图标记列表
1 轮毂托架
2 车轮
3 多连杆组件
5 副车架
7 副车架纵梁
9 副车架横梁
11 电机
13 驱动轴
15 副车架支承件
17 悬架弹簧
19 减振器
21 前方的、在车身侧的梯形控制臂连接点
23 后方的、在车身侧的梯形控制臂连接点
25 前方的、在轮毂托架侧的梯形控制臂连接点
27 后方的、在轮毂托架侧的梯形控制臂连接点
29、31、33 控制臂L2、L3、L4的在轮毂托架侧的连接点
35 支承件内套筒
37 支承销
39 轮毂托架的托架翼部
41 梯形控制臂中的支承件接纳部
45 弹性体
47、49 耦联杆
51 下方的铰接部位
53 上方的铰接部位
Sx、Sy 摆动轴线
55 梯形控制臂悬臂
57 弹簧阻尼元件
L1 梯形控制臂
L2、L3、L4 横向控制臂
HA 车桥
D 车轮转轴
FR 行驶方向
Δx 纵向行程
Sx、Sy 摆动轴线
本文用于企业家、创业者技术爱好者查询,结果仅供参考。