1.本实用新型涉及焦化除尘技术领域,具体地,涉及一种放灰控制装置。
背景技术:
2.焦炉在进行焦化工艺的过程中会产生大量粉尘,直接将粉尘排放至大气中会严重污染环境,为此,就需要利用除尘设备对焦炉排放的气体中的粉尘进行过滤。
3.除尘设备的贮灰仓是除尘输灰系统中储存粉尘的必备装置,贮灰仓中储存的粉尘目前采用密闭式的抽吸罐车来运输,且在将贮灰仓中储存的粉尘排放至抽吸罐车的过程中,由操作人员手动控制电动阀门的开闭以控制粉尘的排放量。但是,这会存在放灰量不准确或放灰不及时的问题,导致贮灰仓中粉尘积存量过多,容易造成除尘设备工作阻力增加,使除尘设备的除尘效率下降,甚至造成粉尘过滤不充分,气体排放不达标。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一,提出了一种放灰控制装置,其可以自动控制焦炉除尘设备的粉尘贮存仓放灰,从而及时地对粉尘贮存仓进行放灰,同时保证放灰量的准确性。
5.为实现本实用新型的目的提供一种放灰控制装置,包括重量检测单元、放灰单元和控制单元;其中,所述放灰单元设置在所述粉尘贮存仓的排放口,用于开启或关闭所述排放口;所述重量检测单元设置在所述粉尘贮存仓的被支撑位置处,用于实时检测所述粉尘贮存仓中存储的粉尘的当前重量值,并将其发送至所述控制单元;所述控制单元用于判断所述当前重量值是否超出预设阈值,若是,则发出放灰提示,并在粉尘回收设备到位之后,控制所述放灰单元开启所述排放口,以将预设单次放灰重量的粉尘排放至所述粉尘回收设备中。
6.可选的,所述放灰控制装置还包括限位检测单元,所述限位检测单元用于检测所述粉尘回收设备是否到达预设位置,并在所述粉尘回收设备到达所述预设位置时向所述控制单元发送到位信号;所述控制单元在收到所述到位信号时,控制所述放灰单元开启所述排放口。
7.可选的,所述粉尘回收设备包括粉尘运输车辆;所述预设位置被设置为所述粉尘运输车辆的用于储存粉尘的车厢与所述排放口相对的位置。
8.可选的,所述控制单元还用于在收到所述到位信号时开始计时,并判断当前累计时长是否达到预设延时时长,若是,则控制所述放灰单元开启所述排放口;若否,则返回所述判断所述当前累计时长是否达到预设延时时长的步骤。
9.可选的,所述放灰控制装置还包括振动单元,所述振动单元与所述粉尘贮存仓连接,用于使所述粉尘贮存仓中存储的粉尘振动,以防止粉尘堵塞所述排放口。
10.可选的,所述振动单元包括振动电机,所述振动电机设置在所述粉尘贮存仓的外壁上,用于通过振动所述粉尘贮存仓的外壁来使所述粉尘贮存仓中存储的粉尘振动。
11.可选的,所述控制单元用于在排放粉尘时,每间隔第一预设时长开启所述振动单元,并在所述振动单元开启第二预设时长之后关闭所述振动单元。
12.可选的,所述控制单元在开始排放粉尘时开始计时,并判断当前累计时长是否达到与所述预设单次放灰重量所需的放灰时长,若是,则控制所述放灰单元关闭所述排放口;若否,则返回所述判断当前累计时长是否达到与所述预设单次放灰重量所需的放灰时长的步骤。
13.可选的,所述控制单元还用于计算在所述放灰单元在排放粉尘之前的所述粉尘贮存仓中存储的粉尘的重量与所述放灰单元在完成一次粉尘排放之后的所述粉尘贮存仓中存储的粉尘的重量的差值,并将所述差值用作所述预设单次放灰重量。
14.可选的,所述放灰控制装置还包括摄像单元,所述摄像单元设置在与所述粉尘贮存仓排放口相对应的位置处,用于拍摄所述粉尘贮存仓的放灰过程。
15.可选的,所述放灰控制装置还包括显示器,所述显示器用于接收并显示所述摄像单元拍摄到的图像。
16.可选的,所述放灰控制装置还包括放灰操作开关,所述放灰操作开关设置于粉尘贮灰仓外部,用所述放灰操作开关向所述控制单元发送二次放灰信号;若所述放灰操作开关为开启状态,则所述放灰操作开关向所述控制单元发送所述二次放灰信号;若所述放灰操作开关为关闭状态,则不向所述控制单元发送任何信号;所述控制单元接收到所述二次放灰信号,控制所述放灰单元开启所述排放口进行放灰。
17.本实用新型的有益效果:本实用新型提供的放灰控制装置,其通过利用重量检测单元实时检测粉尘贮存仓中粉尘的当前重量值,并利用控制单元在粉尘重量到达预设阈值时打开放灰单元,可以及时排出粉尘,以解决放灰不及时的问题;而且上述控制单元能够控制每次排放至粉尘回收设备中的粉尘的放灰重量,从而可以精确地控制单次放灰重量。
附图说明
18.图1为本实用新型实施例提供的放灰控制装置的原理框图;
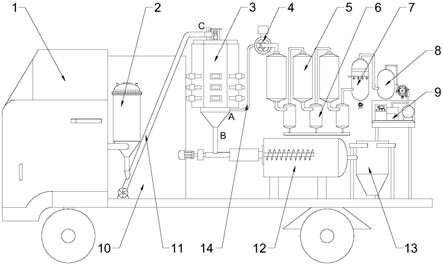
19.图2为本实用新型实施例提供的放灰控制装置的结构图;
20.图3为本实用新型实施例提供的放灰控制装置的放灰流程框图。
具体实施方式
21.为使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图来对本实用新型实施例提供的放灰控制装置进行详细描述。
22.本实施例提供的放灰控制装置,应用于焦炉除尘设备的粉尘贮灰仓,该粉尘贮存仓用于贮存焦炉除尘设备过滤出的粉尘,若粉尘贮存仓中贮存的粉尘量超出一定阈值却不能够及时放出,那么堆积的粉尘将会堵塞粉尘贮存仓排放口,而且粉尘堆积过多易造成粉尘的二次飞扬,以上两种情况都会造成除尘设备的除尘效率下降,从而使焦炉除尘设备排出的气体中粉尘含量过高而达不到国家标准。另外,为了避免对大气的二次污染,粉尘贮存仓中的粉尘不能直接排放到大气环境中,通常需要排放至粉尘回收设备中,以避免扬尘。
23.为了能够及时地对粉尘贮存仓进行放灰,同时保证放灰量的准确性,请一并参阅图1和图2,本实施例提供一种放灰控制装置,包括重量测量单元1、放灰单元3和控制单元2,
其中,放灰单元3设置在粉尘贮存仓23的排放口25处并与排放口25相连,用于开启或关闭该排放口25。该放灰单元3包括阀门24,阀门24例如为电磁阀等的自动通断阀。在一些实施例中,还可以在放灰单元3中设置加湿机26,并使加湿机26与阀门24相连,其用于提高自排放口25排出的粉尘的湿度,以减少扬尘。
24.重量检测单元1设置在粉尘贮存仓23的被支撑位置处,用于实时检测粉尘贮存仓23中存储的粉尘的当前重量值,并将其发送至控制单元2。实现了对粉尘贮存仓23中的粉尘重量的实时检测。在本实施例中,如图2所示,上述粉尘贮存仓23的被支撑位置具体在粉尘贮存仓23外壁的靠近上边缘处的位置,但本实施例并不限于此,粉尘贮存仓的23的被支撑位置可依据实际生产需要设置在粉尘贮存仓23外壁上的可以使粉尘贮存仓23的自身重力全部施加于重量检测单元1上的任意位置。重量检测单元1例如为重量传感器,由于其设置在粉尘贮存仓23之外,工作环境较好,所以其使用寿命较长。可选的,可采用料位计代替重量检测单元1,用于检测粉尘贮存仓23内部粉尘的料位高度并向控制单元2发送料位信号,其可以配合控制单元2实现对粉尘贮存仓23内粉尘体积的实时检测。
25.控制单元2用于判断粉尘贮存仓23中存储的粉尘的当前重量值是否超出预设阈值,若是,则发出放灰提示,以使操作人员能够根据提示调度粉尘回收设备29,以使其移动至与粉尘贮存仓23的排放口25对应的位置处,并在粉尘回收设备29到位之后,控制单元2还用于控制放灰单元3开启排放口25,以将预设单次放灰重量的粉尘排放至粉尘回收设备29中。其中,上述预设阈值可由操作人员根据粉尘贮存仓23的实际容量进行设置。控制单元2根据粉尘贮存仓23的实时重量值和预设阈值判断粉尘贮存仓是否需要放灰,能够实现粉尘贮存仓23的及时放灰。上述控制单元2例如为诸如plc、计算机等的微处理器,其响应速度快,便于实现粉尘贮存仓的及时放灰。
26.在一些实施例中,放灰控制装置还包括限位检测单元4,用于检测粉尘回收设备29是否达到预设位置,并在粉尘回收设备29达到预设位置时向控制单元2发送到位信号。上述预设位置是指粉尘回收设备29位于能够接收自粉尘贮存仓23的排放口25排出的粉尘的位置。例如,在本实施例中,粉尘回收设备29为粉尘运输车辆,其具有用于存储粉尘的车厢30,在这种情况下,上述预设位置被设置为粉尘运输车辆的车厢30与排放口25相对的位置,以使自粉尘贮存仓23的排放口25排出的粉尘能够落入车厢30中。
27.在一些实施例中,放灰控制装置还包括防护罩28,其设置在限位检测单元4附近,具体的,其遮挡于限位检测单元4的上方,用于避免限位检测单元4被尘埃或雨水影响,从而增加限位检测单元4的使用寿命。
28.上述限位检测单元4例如为光电式检测开关,用以通过发出光信号来检测粉尘回收设备的位置,能够在限位检测单元4的位置与粉尘回收设备29的预设位置距离较远的条件下准确地检测粉尘回收设备29是否到位。但本实用新型实施例并不限于此,在实际应用中,还可根据实际要求来选用其他限位检测器件。
29.在本实施例中,控制单元2还用于在收到上述限位检测单元4发送的到位信号时开始计时,并判断当前累计时长是否达到预设延时时长,若是,则控制放灰单元3开启排放口25;若否,则返回判断当前累计时长是否达到预设延时时长的步骤。其中,预设延时时长可根据具体生产需求进行设定。在放灰过程开始之前,使控制单元2进行一定时长的延时,避免由于控制单元2的处理速度过快使放灰单元3来不及响应而影响放灰流程的进行。
30.如图2所示,本实用新型实施例提供的放灰控制装置还包括振动单元5,振动单元5与粉尘贮存仓23连接,用于使粉尘贮存仓23中存储的粉尘振动,以防止粉尘堵塞排放口25。振动单元5例如为振动电机,其与粉尘贮存仓23的外壁相接触并能够使其振动,但本实施例不限于此,在实际应用中,可根据实际生产需要对振动单元5的类型进行选择,使振动单元5能够使粉尘贮存仓23中的粉尘振动即可。在一些实施例中,控制单元2用于在排放粉尘时,每间隔第一预设时长开启振动单元5,并在振动单元5开启第二预设时长之后关闭所述振动单元,以实现在排放粉尘的过程中粉尘贮存仓23的间歇式振动。
31.在一些实施例中,控制单元2还用于在放灰单元3开始排放粉尘时开始计时,并判断当前累计时长是否达到与预设单次放灰重量所需的放灰时长,若是,则控制放灰单元3关闭排放口25;若否,则返回判断当前累计时长是否达到与预设单次放灰重量所需的放灰时长的步骤。这能够实现对放灰时长的精确自动控制。
32.在一些实施例中,控制单元2还用于计算在放灰单元3在排放粉尘之前的粉尘贮存仓23中存储的粉尘的重量与放灰单元3在完成一次粉尘排放之后的粉尘贮存仓23中存储的粉尘的重量的差值,并将该差值用作预设单次放灰重量。该差值由粉尘回收设备29的实际容量决定,即,预设单次放灰重量是由粉尘回收设备29的实际容量决定的,这可以实现对粉尘回收设备29的容量的合理利用。
33.在一些实施例中,放灰控制装置还包括摄像单元27,摄像单元27设置在与粉尘贮存仓23的排放口25相对应的位置处,用于拍摄粉尘贮存仓23的放灰过程,便于操作人员对放灰过程的远程监控。
34.在一些实施例中,放灰控制装置还包括显示器(图中未示出),所述显示器用于接收并显示摄像单元27拍摄到的图像。便于操作人员远程查看贮灰间21的内部的情况。
35.如图2所示,摄像单元27设置在贮灰间21内壁上的与粉尘贮存仓23的排放口相对应的位置,用于拍摄在放灰过程中贮灰间21的内部的情况,摄像单元27包括镜头部分271和机身部分272。在一些实施例中,在贮灰间21壁上与粉尘贮存仓23的排放口相对应的位置具有一个通孔,将摄像单元27的机身部分272设置在粉尘贮存仓的外壁上,以使摄像单元27的镜头部分271通过上述通孔拍摄放灰过程,从而避免摄像单元27的机身部分272在贮灰间21内部恶劣的环境下工作。
36.在一些实施例中,也可以在贮灰间21壁上与粉尘贮存仓23的排放口对应的位置开设透明小窗,以使镜头部分271透过上述透明小窗拍摄放灰过程,将摄像单元27全部设置在贮灰间21的外壁上,这能够最大限度地保护摄像单元27,提高了摄像单元27的使用寿命。
37.结合图2,放灰控制装置还包括放灰操作开关31,其设置于粉尘贮灰仓23外部,用于向控制单元2发送二次放灰信号;若放灰操作开关31为开启状态,则向控制单元2发送二次放灰信号;若放灰操作开关31为关闭状态,则不向控制单元2发送任何信号;控制单元2接收到二次放灰信号,控制放灰单元3开启排放口25进行放灰。可选的,放灰操作开关31由操作人员控制,若操作人员观察到单次放灰结束后粉尘回收设备29并未被装满,则开启放灰操作开关31。这能够避免单次放灰结束后粉尘回收设备29的容量没有被充分利用。
38.在一些实施例中,粉尘回收设备29为运输车辆,其包括车辆载重检测单元(图中未示出),车辆载重检测单元设置在运输车辆内,用于检测车辆的当前负载重量,若车辆载重未到达最大负载量,则发出二次放灰提示,以提示操作人员进行二次放灰;若车辆载重到达
最大负载量,则发出运输提示,以提示操作人员将车辆驶离卸灰间22。可选的,将放灰操作开关31设置在贮灰间22外壁上与粉尘运输设备预设位置对应的位置,便于操作人员控制放灰操作开关31,使操作人员无需进入卸灰间22内部即可控制放灰流程,这可以避免操作人员在恶劣的环境下工作,保证了操作人员的人身安全。
39.图3是本实施例的放灰装置控制放灰过程的控制流程图。如图3所示,具体的控制流程为:
40.步骤s10:重量检测单元1检测当前粉尘贮存仓23中的粉尘重量;
41.步骤s20:控制单元2判断粉尘贮存仓23内的粉尘重量是否到达预设阈值,若是,则进行步骤s30,若否,则重量检测单元1继续检测当前粉尘重量;
42.步骤s30:控制单元2发出放灰提示;
43.步骤s40:操作人员收到放灰提示后,调度粉尘回收设备29前来回收将要排放出的粉尘;
44.步骤s50:限位检测单元4检测粉尘回收设备29的位置;
45.步骤s60:限位检测单元4判断粉尘回收设备29的位置是否与预设的位置重合,若是,则进行步骤s70,若否,则限位检测单元4继续检测粉尘回收设备29的位置;
46.步骤s70:当粉尘回收设备29到达预设位置,延时一段时间,本实施例中延时时长为15s,但不仅限于此,可依据实际生产需要进行调整;
47.步骤s80:延时完毕,控制单元2控制放灰单元3开启,放灰单元3开启排灰口25开始放灰,在此阶段,控制单元2还控制振动单元5每间隔第一预设时长开启,并在振动单元5开启第二预设时长之后控制其关闭,以实现粉尘贮存仓23的间歇式振动;
48.步骤s90:放灰单元3开启后,控制单元2开始计时,并判断当前累计时长是否达到与预设单次放灰重量所需的放灰时长,若是,则进行步骤s100,若否,则放灰单元3保持开启状态,可选的,在此阶段振动单元5继续根据第一预设时长和第二预设时长进行间歇式振动;
49.步骤s100:当控制单元2判断放灰时长已达到预设的单次放灰时长时,控制单元2判断放灰重量是否到达预设的单次放灰重量,若是,则进行步骤s110,若否,则放灰单元3保持开启状态,可选的,在此阶段振动单元5继续根据第一预设时长和第二预设时长进行间歇式振动;
50.步骤s110:控制单元2控制放灰单元3和振动单元5关闭,放灰流程结束。
51.综上所述,本实施例提供的放灰控制装置,通过利用重量检测单元检测粉尘贮存仓中粉尘的当前重量,并将粉尘重量值发送至控制单元,实现了对粉尘贮存仓中的粉尘重量的实时监控,解决了现有技术中不及时放灰的问题;并且利用控制单元根据粉尘重量阈值控制放灰单元的开启,并根据预设单次放灰重量和预设放灰时间来控制放灰单元的关闭,解决了现有技术中放灰量不准确的问题。而且通过利用本实施例提供的放灰控制装置来控制放灰流程,能够使操作人员远程监控粉尘贮存仓的放灰过程,解决了贮灰间内无人操作的问题,保证了操作人员的人身安全。
52.可以理解的是,以上实施方式仅仅是为了说明本实用新型的原理而采用的示例性实施方式,然而本实用新型并不局限于此。对于本领域内的普通技术人员而言,在不脱离本实用新型的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本实
用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。