1.本发明涉及医疗技术领域,具体涉及一种医院用衣物快速分类装置。
背景技术:
2.在医院中,由于治疗环境的需要,患者和医生的衣物常需要进行频繁的清洗消毒处理,各个病房科室的医生和患者的脱下来的衣物需要堆放在一个衣物集中放置点,现有技术存在以下问题:
3.但是现有技术中,存在以下问题:
4.1、医生和患者在衣物放置点有行踪交叉,后勤工作人员取用这些衣物,容易造成交叉污染。
5.2、给后勤工作人员的分类计数造成了极大的麻烦,耗费时间较长,不便于对每个医生和患者的衣物信息读取分类。
6.3、不便于对衣物进行集中存放,衣物存储放置空间利用率低。
技术实现要素:
7.本发明的目的就在于为了解决上述问题而提供一种医院用衣物快速分类装置,欲克服现有技术的缺陷,详见下文阐述。
8.为实现上述目的,本发明提供了以下技术方案:
9.本发明提供的一种医院用衣物快速分类装置,包括箱体和机器人,所述箱体和机器人之间设置有彼此可拆卸连接的自动卡接结构,所述机器人上设置有用于接收外部信息的远程信息接收单元,所述箱体的外侧设置有数显控制面板,所述箱体的下侧设置有若干个万向轮;
10.所述箱体的内部均开设有若干个放置腔室,每个放置腔室的一侧均开口,且开口处设置有箱门,所述放置腔室的顶端设置有用于与外部上方连通的漏斗,漏斗处开合设置有用于对衣物上信息存储单元进行检测读取的信息检测组件;
11.每个放置腔室内均设置有衣物放置袋,衣物放置袋的内部中空上端开口,所述衣物放置袋的上端开口处可拆卸连接至漏斗的下侧,放置腔室的内部底面设置有用于对衣物放置袋底部进行转动拨动的拨动组件。
12.采用上述结构,使用时,机器人上的远程信息接收单元对各个病房诊室设置有的信息发送器进行信息接收,在患者或医生有脏衣想要清洗时,操作信息发送器向机器人发送信息请求,机器人通过自动卡接结构卡接连接箱体,拉动箱体通过底部设置有的万向轮向需要进行清洗衣物的病房或者诊室移动,在移动到发送请求信息的病房或者诊室地方时,患者或医生将衣物放置在漏斗内的信息检测组件上,信息检测组件对衣物上的信息存储单元进行读取,实现对衣物的信息识别以及计数,然后数显控制面板控制打开信息检测组件,使得衣物从漏斗处落入衣物放置袋内,衣物放置袋下方设置有的拨动组件可以实现对衣物放置袋的偏转转动,使得衣物在衣物放置袋内分布更加紧密均匀,可以存放更多的
衣物。
13.作为优选,所述自动卡接结构包括电动伸缩杆和卡接头,电动伸缩杆固定设置在机器人上,电动伸缩杆的推杆头端固定连接有夹台,夹台的左右两侧通过齿轮传动机构由第一电机驱动转动连接有弧形夹板,弧形夹板通过转轴与夹台彼此转动连接,弧形夹板远离夹台的一侧转动连接有滚轮,卡接头的外形呈圆柱体形状,卡接头的一侧通过连接板固定连接至箱体外侧壁上,卡接头内设置有用于向机器人发送定位信号的信号发送单元。
14.作为优选,所述齿轮传动机构包括第一齿轮,第一齿轮的两侧彼此啮合连接有第二齿轮和第三齿轮,第二齿轮和第三齿轮的轴端分别固定连接至两个转轴的轴端。
15.作为优选,所述拨动组件包括转盘,转盘由固定设置在箱体底部的第二电机驱动转动,转盘的外形呈圆盘状,转盘的上侧固定设置有以其轴线为中心等角度均匀分布的三组以上拨动杆,每组包括两个以上沿转盘径向均匀分布的拨动杆。
16.作为优选,所述衣物放置袋采用不透明塑料材质制成,衣物放置袋的上端开口沿其边沿设置有弹性缩紧绳,所述衣物放置袋的上部两侧固定设置有提拉带,漏斗的外形呈上宽下窄的喇叭口形状,所述漏斗的下端外侧壁固定设置有与弹性缩紧绳配合连接的挂环。
17.作为优选,所述漏斗的上端开口处铰接有由气缸驱动开合的顶盖,顶盖朝向漏斗的一侧设置有紫外线消毒灯,所述漏斗的上端开口沿其边沿设置有与顶盖外侧边沿配合密封的密封垫圈。
18.作为优选,所述信息检测组件包括挡板和直齿轮,挡板滑动连接至漏斗底部内侧开设有的直滑槽内,所述挡板的内部设置有信息读取单元,挡板的下侧形成有呈直线形状的传动齿槽,所述直齿轮与传动齿槽配合啮合,所述直齿轮由安装在箱体内的第三电机驱动转动
19.作为优选,所述信息存储单元采用电子标签。
20.有益效果在于:
21.1、机器人带动箱体对脏衣进行自动收取,可以避免医生、患者和后勤工作人员在衣物放置点有行踪交叉,避免造成交叉污染。
22.2、信息检测组件和衣物上的信息存储单元给后勤工作人员的分类计数提供了极大的方便,可以在数显控制面板上直观显示。
23.3、衣物放置袋便于对衣物进行集中存放,拨动组件可以提高衣物在衣物放置袋内的空间利用率,可以收集更多的衣物。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
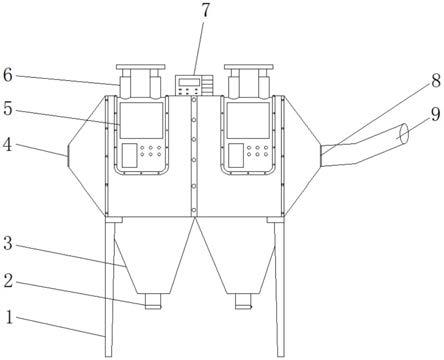
25.图1是本发明的主视图;
26.图2是本发明图1的左视图;
27.图3是本发明图2的a
‑
a剖面图;
28.图4是本发明图3的b处局部放大图;
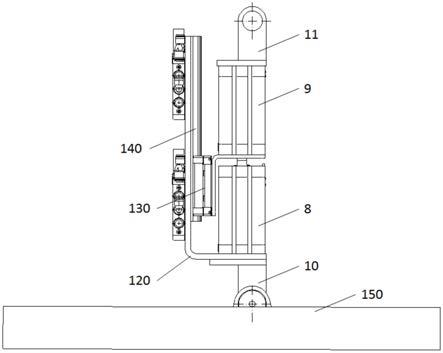
29.图5是本发明的自动卡接结构剖面图;
30.图6是本发明的自动卡接结构立体图;
31.图7是本发明图1的立体图。
32.附图标记说明如下:1、箱体;2、机器人;3、自动卡接结构;301、夹台;302、转轴;303、弧形夹板;304、第一电机;305、齿轮传动机构;305a、第一齿轮;305b、第二齿轮;305c、第三齿轮;306、电动伸缩杆;307、卡接头;308、滚轮;309、信号发送单元;4、数显控制面板;5、拨动组件;5a、转盘;5b、第二电机;5c、拨动杆;6、衣物放置袋;6a、提拉带;6b、弹性缩紧绳;7、放置腔室;8、顶盖;9、气缸;10、漏斗;10a、挂环;11、箱门;11a、电磁锁;11b、把手;12、紫外线消毒灯;13、万向轮;14、电池;15、密封垫圈;16、信息检测组件;16a、直齿轮;16b、第三电机;16c、挡板;16d、传动齿槽;16e、信息读取单元。
具体实施方式
33.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
34.参见图1
‑
图7所示,本发明提供了一种医院用衣物快速分类装置,包括箱体1和机器人2,箱体1和机器人2之间设置有彼此可拆卸连接的自动卡接结构3,箱体1和机器人2彼此可拆卸连接,便于机器人2在拉动的一个箱体1内储放衣物满了之后,可以通过自动卡接结构3断开该箱体1更换另外一个,机器人2上设置有用于接收外部信息的远程信息接收单元,各个病房诊室设置有信息发送器,患者或医生可以根据信息发送器对机器人2进行信息发送,机器人2上的远程信息接收单元对该信息进行接收,从而自动拉着箱体1移动到该地点进行衣物收集,箱体1的外侧设置有数显控制面板4,箱体1的下侧设置有若干个万向轮13;箱体1的内部均开设有若干个放置腔室7,进一步放置腔室7设置有两个,每个放置腔室7的一侧铰接有箱门11,箱门11的外侧设置有把手11b,箱门11和箱体1之间设置有电磁锁11a,每个放置腔室7的一侧均开口,且开口处设置有箱门11,放置腔室7的顶端设置有用于与外部上方连通的漏斗10,漏斗10处开合设置有用于对衣物上信息存储单元进行检测读取的信息检测组件16,数显控制面板4可以对信息检测组件16检测到的信息进行显示,信息存储单元采用电子标签;每个放置腔室7内均设置有衣物放置袋6,衣物放置袋6的内部中空上端开口,衣物放置袋6的上端开口处可拆卸连接至漏斗10的下侧,放置腔室7的内部底面设置有用于对衣物放置袋6底部进行转动拨动的拨动组件5。
35.见说明书附图5和6所示,自动卡接结构3包括电动伸缩杆306和卡接头307,电动伸缩杆306固定设置在机器人2上,电动伸缩杆306的推杆头端固定连接有夹台301,夹台301的左右两侧通过齿轮传动机构305由第一电机304驱动转动连接有弧形夹板303,弧形夹板303通过转轴302与夹台301彼此转动连接,弧形夹板303远离夹台301的一侧转动连接有滚轮308,卡接头307的外形呈圆柱体形状,卡接头307的一侧通过连接板固定连接至箱体1外侧壁上,卡接头307内设置有用于向机器人2发送定位信号的信号发送单元309。齿轮传动机构305包括第一齿轮305a,第一齿轮305a的两侧彼此啮合连接有第二齿轮305b和第三齿轮
305c,第二齿轮305b和第三齿轮305c的轴端分别固定连接至两个转轴302的轴端。在机器人2需要卡接箱体1时,位于箱体1上的信号发送单元309向机器人2发送信号,机器人2靠近具有信号发送单元309的卡接头307移动,此时机器人2的电动伸缩杆306伸缩推动夹台301靠近卡接头307移动,然后第一电机304的输出轴转动带动第一齿轮305a转动,第一齿轮305a转动带动两侧啮合的第二齿轮305b和第三齿轮305c转动,从而实现对两个弧形夹板303的开合,在弧形夹板303闭合时,实现对卡接头307的卡接,在弧形夹板303打开时,实现对卡接头307的分离。
36.见说明书附图1和3所示,拨动组件5包括转盘5a,转盘5a由固定设置在箱体1底部的第二电机5b驱动转动,转盘5a的外形呈圆盘状,转盘5a的上侧固定设置有以其轴线为中心等角度均匀分布的三组以上拨动杆5c,每组包括两个以上沿转盘5a径向均匀分布的拨动杆5c。在实际应用中,衣物放置袋6的底部垂落下落与转盘5a的上侧接触抵接,第二电机5b输出轴转动带动转盘5a转动,转盘5a通过拨动杆5c转动拨动上侧抵接的衣物放置袋6钻到,从而实现对衣物放置袋6内衣物的分布更加均匀紧密,使得衣物放置袋6内可以放置更多的衣物,进一步,在衣物收集完毕后,第二电机5b带动转盘5a转动,转盘5a通过拨动杆5c拨动衣物放置袋6转动,衣物放置袋6内衣物上方和漏斗10之间部位扭结密封,在后勤人员打开箱门11取出衣物放置袋6时,减少衣物放置袋6内衣物与外部接触。
37.见说明书附图1和4所示,衣物放置袋6采用不透明塑料材质制成,衣物放置袋6的上端开口沿其边沿设置有弹性缩紧绳6b,衣物放置袋6的上部两侧固定设置有提拉带6a,漏斗10的外形呈上宽下窄的喇叭口形状,漏斗10的下端外侧壁固定设置有与弹性缩紧绳6b配合连接的挂环10a。在实际应用中,通过上述弹性缩紧绳6b和挂环10a的设计,方便衣物放置袋6和漏斗10的可拆卸连接,还可以提高衣物放置袋6和漏斗10之间连接处的密封性。
38.见说明书附图3所示,漏斗10的上端开口处铰接有由气缸9驱动开合的顶盖8,顶盖8朝向漏斗10的一侧设置有紫外线消毒灯12,漏斗10的上端开口沿其边沿设置有与顶盖8外侧边沿配合密封的密封垫圈15。在实际应用中,需要投放衣物时,数显控制面板4控制打开气缸9,气缸9驱动顶盖8转动打开,患者或医生将衣物放置在漏斗10内的信息检测组件16上时,气缸9驱动顶盖8转动关闭,此时,顶盖8、漏斗10和信息检测组件16之间形成有用于储放衣物的密封空间,此时信息检测组件16的信息读取单元16e对衣物上的信息储存单元进行信息读取,顶盖8上的紫外线消毒灯12对衣物进行初步消毒,完毕后,信息检测组件16的挡板16c滑动打开,衣物落入衣物放置袋6内即可。
39.见说明书附图4所示,信息检测组件16包括挡板16c和直齿轮16a,挡板16c滑动连接至漏斗10底部内侧开设有的直滑槽内,挡板16c的内部设置有信息读取单元16e,挡板16c的下侧形成有呈直线形状的传动齿槽16d,直齿轮16a与传动齿槽16d配合啮合,直齿轮16a由安装在箱体1内的第三电机16b驱动转动。通过上述具体结构设计,第三电机16b的输出轴转动带动直齿轮16a转动,直齿轮16a转动通过传动齿槽16d带动啮合的挡板16c移动,从而实现对漏斗10的开合。
40.机器人2带动箱体1对脏衣进行自动收取,可以避免医生、患者和后勤工作人员在衣物放置点有行踪交叉,避免造成交叉污染。信息检测组件16和衣物上的信息存储单元给后勤工作人员的分类计数提供了极大的方便,可以在数显控制面板4上直观显示。衣物放置袋6便于对衣物进行集中存放,拨动组件5可以提高衣物在衣物放置袋6内的空间利用率,可
以收集更多的衣物。
41.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。