1.本发明属于选矿技术领域,并且更具体地,涉及一种基于阈值的动态调整进行智能分选的方法及系统。
背景技术:
2.我国有大量的磷矿石储备,多集中在云南、湖北、贵州、四川和湖南这五省。磷矿分布集中、富矿少,贫矿多、易选矿少并且难选矿多。但是,除了云贵地区,我国的磷矿石多为自然品位低于27的中贫矿,需要通过选矿工艺获得品位32或者34以上的一类磷精粉。然而,磷块岩结晶颗粒极细并且杂质嵌布复杂,获得高品位磷精矿对选矿工艺要求较高。
3.常规的,常规的选矿方法主要包括正浮选、正
‑
反浮选、反浮选、双反浮选、重介质选矿、重介质
‑
浮选联合选矿等。磷块岩类矿石的成熟选矿技术中,浮选仍然是占主导地位的选别方法。但是磷矿浮选的高能耗、高药耗、尾矿水处理的状况使得获取磷精矿的成本过高,并且对环境不友好的问题日趋凸显。随着各行业的科技进步,新型选矿方法越来越多,并且x射线(x
‑
ray)分选技术也在开始尝试应用。
4.x射线分选技术的原理是:以x射线照射矿石块,以探测器检测x射线经过矿石块后衰减强度的数据信息。强度信息与矿石块中所测元素含量的高低相关。根据所检测到的数据信息,进行成像处理并进行分析识别,并根据预先设定的分选参数,判别并标记矿石块。随后,对低于阈值的矿石块予以抛除,而对高于或等于阈值的矿石块进行下一步的浮选处理。
5.然而,随着目前开采的矿石不断贫化以及采掘面的不同,即使采用x射线分选技术仍然存在进入选矿厂的原矿品位存在较大波动的情形。
技术实现要素:
6.本发明的目的是提供一种基于智能分选的选矿方法。本发明的方法适用于各种类型的矿石分选,例如磷矿、各种金属矿等。本发明的方法特别适用于矿石品位差异明显的情况。本发明所提供的方法,能够使得进入浮选系统的矿粉品位保持恒定。
7.根据本发明的一个方面,提供一种基于阈值的动态调整进行智能分选的方法,所述方法包括:
8.步骤101,利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石;
9.步骤102,将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿;
10.步骤103,对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数,其中所述当前状态参数包括所述粉矿的当前综合品位;
11.步骤104,基于当前综合品位和目标综合品位计算当前综合品位的第一误差比率,在所述第一误差比率不在综合误差比率的设定范围内时,根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长;
12.步骤105,根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选。
13.在利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选之前还包括:对待处理的原始矿石进行初始处理,以获得预定粒度的矿石,并将预定粒度的矿石传送给智能分选系统。
14.所述利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选包括:获取每个预定粒度的矿石的综合品位;将综合品位小于当前品位阈值的矿石确定为废矿石,并对废矿石进行抛除;将综合品位等于或大于当前品位阈值的矿石确定为经过分选的矿石。
15.其中将所述智能分选系统输出的经过分选的矿石进行粉碎包括:利用球磨机将所述智能分选系统输出的经过分选的矿石进行粉碎。所述智能分选系统为x光智能分选机。对待处理的原始矿石进行初始处理,以获得预定粒度的矿石包括:对待处理的原始矿石进行多级粒度处理,以获得预定粒度的矿石;其中多级粒度处理中的每级粒度处理包括破碎处理和筛分处理,并且按照粒度处理的从初始到获得预定粒度的矿石的处理顺序,多级粒度处理中的每级粒度处理所获得的矿石的粒度依次减小。
16.其中对待处理的原始矿石进行多级粒度处理包括:将待处理的原始矿石在第一级粒度处理中进行破碎处理,并将经过破碎处理的矿石进行第一级粒度处理中的筛分处理,将能够通过第一级粒度处理中的筛分处理的矿石传送至第二级粒度处理,而将无法通过第一级粒度处理中的筛分处理的矿石继续在第一级粒度处理中进行破碎处理,直至能够通过第一级粒度处理中的筛分处理为止;按照破碎处理和筛分处理的处理顺序,从第二级粒度处理直至多级粒度处理的最后一级粒度处理为止,完成对待处理的原始矿石的初始处理,以获得预定粒度的矿石。
17.利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石包括:利用给料子系统将预定粒度的矿石提供给传输子系统的高速皮带;传输子系统的高速皮带在运送预定粒度的矿石运行预定距离后,进入至平稳状态,并预定粒度的矿石传输至传感子系统;当预定粒度的矿石在皮带的传输下通过传感子系统的射线源正下方时,射线源利用高压激发的x射线照射预定粒度的矿石,穿透预定粒度的矿石的x射线由于所测元素含量的不同而产生不同程度的衰减;由传感子系统的位于皮带下方的探测器采集衰减数据信息,将衰减数据信息转化为光电数字信号,并将光电数字信号传送给智能识别系统的智能识别子系统;
18.智能识别子系统基于光电数字信号生成待识别成像,并对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数,基于当前品位阈值确定当前分选参数,将矿石参数与当前分选参数进行比较,以基于比较结果将预定粒度的矿石标记为废石或高品位矿石,将标记为高品位矿石的矿石的位置信息发送给分离子系统的喷吹控制单元;
19.当预定粒度的矿石在传输子系统的皮带输送下到达预定位置时,分离子系统的气排枪在喷吹控制单元的控制下,通过气排枪的喷嘴喷吹被标记为高品位矿石或废石的预定粒度的矿石,从而将废石和高品位矿石进行分选,实现对预定粒度的矿石进行分选,以输出经过分选的矿石。
20.在对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数之后还包括:将综合品位小于当前品位阈值的预定粒度的矿石确定为废石,并且将综合品位大于或等于当前品位阈值的预定粒度的矿石确定为高品位矿石;获取第一预定时间段内进入智能分选系统的每颗废石的综合品位值和质量,并且获取第一预定时间段内进入智能分选系统的每颗高品位矿石的综合品位值和质量;
21.基于每颗废石的综合品位值和质量,计算第一预定时间段内废石的加权平均综合品位
22.其中,kf
i
为第一预定时间段内第i颗废石的综合品位系数,mf
i
为第一预定时间段内第i颗废石的质量系数,nf为第一预定时间段内废石的数量;
23.基于每颗高品位矿石的综合品位值和质量,计算第一预定时间段内高品位矿石的加权平均综合品位
24.其中,ky
i
为第一预定时间段内第i颗高品位矿石的综合品位系数,my
i
为第一预定时间段内第i颗高品位矿石的质量系数,ny为第一预定时间段内废石的数量。
25.将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿包括:对所述智能分选系统输出的经过分选的矿石的粒度进行判断,当粒度大于球磨阈值时,对粒度大于球磨阈值的矿石进行破碎,直至粒度小于或等于球磨阈值为止;当粒度小于球磨阈值时,利用球磨机对粒度小于球磨阈值的矿石进行粉碎,以获得粉矿。其中对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数包括:在第二预定时间段内,在利用多个机械手中的每个机械手从输送粉矿的皮带上,按照预定时间间隔获取预定质量的粉矿;促使每个机械手将所获取的预定质量的粉矿,通过负压管道输送给荧光分析仪的集料位置;在集料位置处的粉矿的质量达到质量阈值时,促使荧光分析仪对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数;所述当前状态参数包括:粉矿的当前综合品位、粉矿的主元素品位、粉矿的次元素品位以及粉矿的废矿品位。
26.还包括,对智能分选系统内设备的运行位置、皮带转运状态、破碎统计时间、筛分统计时间、球磨统计时间以及分析统计时间进行累加以确定系统延迟时间;基于系统延迟时间范围内的智能分选系统所分选的废石和/或高品位矿石相关的加权综合平均品位和荧光监测仪获取的粉矿的品位分析数据确定特定时刻的粉矿品位与目标品位的第二误差比率;当特定时刻的粉矿品位小于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值增加步长;当特定时刻的粉矿品位大于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值减小步长。在所述第一误差比率在综合误差比率的设定范围内时,等待第三预定时间段,并且在第三预定时间段期满时,进行步骤101。还包括确定数据匹配时间段,所述数据匹配时间段为,针对同一批预定粒度的矿石,智能分选系统根据当前品位阈值对预定粒度的矿石进行分选的时刻t1和对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数的时刻t2之间的时间差值。
27.根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长包括:
28.步长n=f(x1,x2,x3,x4,x5,x6,x7)
29.其中,x1为主元素品位与主元素目标品位的误差,x2为第一次元素品位与第一次元素目标品位的误差,x3为第二次元素品位与第二次元素目标品位的误差,x4为当前时刻的高品位矿石的加权综合品位,x5为当前时刻的废石的加权废石品位,x6为高品位矿石的数量占比,x7为当前品位阈值。
30.其中,x1为主参量,以指数关系与x2和x3连用;x4、x5、x6和x7通过拟合函数,构造拟合点,将x1、x2和x3综合计算得到的点映射在拟合点上,最终获得步长n。
31.根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101。根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101,并且在步骤102完成后,等待第四预定时间段;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101,并且在步骤102完成后,等待第四预定时间段;其中所述第四预定时间段大于所述数据匹配时间段。所述智能分选系统、球磨机和荧光在线分析仪为闭环控制。
32.根据本发明的另一方面,提供一种基于阈值的动态调整进行智能分选的系统,所述系统包括:分选设备,促使利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石;粉碎设备,将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿;检测设备,对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数,其中所述当前状态参数包括所述粉矿的当前综合品位;计算设备,基于当前综合品位和目标综合品位计算当前综合品位的第一误差比率,在所述第一误差比率不在综合误差比率的设定范围内时,根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长;调整设备,根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选。
33.还包括初始化设备,对待处理的原始矿石进行初始处理,以获得预定粒度的矿石,并将预定粒度的矿石传送给智能分选系统。分选设备利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选包括:分选设备获取每个预定粒度的矿石的综合品位;分选设备将综合品位小于当前品位阈值的矿石确定为废矿石,并对废矿石进行抛除;分选设备将综合品位等于或大于当前品位阈值的矿石确定为经过分选的矿石。其中粉碎设备将所述智能分选系统输出的经过分选的矿石进行粉碎包括:粉碎设备利用球磨机将所述智能分选系统输出的经过分选的矿石进行粉碎。所述智能分选系统为x光智能分选机。初始化设备对待处理的原始矿石进行初始处理,以获得预定粒度的矿石包括:初始化设备对待处理的原始矿石进行多级粒度处理,以获得预定粒度的矿石;其中多级粒度处理中的每级粒度处理包括破碎处理和筛分处理,并且按照粒度处理的从初始到获得预定粒度的矿石的处理顺
序,多级粒度处理中的每级粒度处理所获得的矿石的粒度依次减小。
34.其中初始化设备对待处理的原始矿石进行多级粒度处理包括:初始化设备将待处理的原始矿石在第一级粒度处理中进行破碎处理,并将经过破碎处理的矿石进行第一级粒度处理中的筛分处理,将能够通过第一级粒度处理中的筛分处理的矿石传送至第二级粒度处理,而将无法通过第一级粒度处理中的筛分处理的矿石继续在第一级粒度处理中进行破碎处理,直至能够通过第一级粒度处理中的筛分处理为止;初始化设备按照破碎处理和筛分处理的处理顺序,从第二级粒度处理直至多级粒度处理的最后一级粒度处理为止,完成对待处理的原始矿石的初始处理,以获得预定粒度的矿石。分选设备利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石包括:分选设备利用给料子系统将预定粒度的矿石提供给传输子系统的高速皮带;分选设备传输子系统的高速皮带在运送预定粒度的矿石运行预定距离后,进入至平稳状态,并预定粒度的矿石传输至传感子系统;当预定粒度的矿石在皮带的传输下通过传感子系统的射线源正下方时,射线源利用高压激发的x射线照射预定粒度的矿石,穿透预定粒度的矿石的x射线由于所测元素含量的不同而产生不同程度的衰减;由传感子系统的位于皮带下方的探测器采集衰减数据信息,将衰减数据信息转化为光电数字信号,并将光电数字信号传送给智能识别系统的智能识别子系统;智能识别子系统基于光电数字信号生成待识别成像,并对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数,基于当前品位阈值确定当前分选参数,将矿石参数与当前分选参数进行比较,以基于比较结果将预定粒度的矿石标记为废石或高品位矿石,将标记为高品位矿石的矿石的位置信息发送给分离子系统的喷吹控制单元;
35.当预定粒度的矿石在传输子系统的皮带输送下到达预定位置时,分离子系统的气排枪在喷吹控制单元的控制下,通过气排枪的喷嘴喷吹被标记为高品位矿石或废石的预定粒度的矿石,从而将废石和高品位矿石进行分选,实现对预定粒度的矿石进行分选,以输出经过分选的矿石。
36.智能识别子系统在对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数之后还包括:将综合品位小于当前品位阈值的预定粒度的矿石确定为废石,并且将综合品位大于或等于当前品位阈值的预定粒度的矿石确定为高品位矿石;获取第一预定时间段内进入智能分选系统的每颗废石的综合品位值和质量,并且获取第一预定时间段内进入智能分选系统的每颗高品位矿石的综合品位值和质量;
37.基于每颗废石的综合品位值和质量,计算第一预定时间段内废石的加权平均综合品位
38.其中,kf
i
为第一预定时间段内第i颗废石的综合品位系数,mf
i
为第一预定时间段内第i颗废石的质量系数,nf为第一预定时间段内废石的数量;
39.基于每颗高品位矿石的综合品位值和质量,计算第一预定时间段内高品位矿石的加权平均综合品位
40.其中,ky
i
为第一预定时间段内第i颗高品位矿石的综合品位系数,my
i
为第一预定时间段内第i颗高品位矿石的质量系数,ny为第一预定时间段内废石的数量。
41.粉碎设备将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿包括:粉碎设备对所述智能分选系统输出的经过分选的矿石的粒度进行判断,当粒度大于球
磨阈值时,对粒度大于球磨阈值的矿石进行破碎,直至粒度小于或等于球磨阈值为止;当粒度小于球磨阈值时,粉碎设备利用球磨机对粒度小于球磨阈值的矿石进行粉碎,以获得粉矿。其中检测设备对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数包括:
42.检测设备在第二预定时间段内,在利用多个机械手中的每个机械手从输送粉矿的皮带上,按照预定时间间隔获取预定质量的粉矿;检测设备促使每个机械手将所获取的预定质量的粉矿,通过负压管道输送给荧光分析仪的集料位置;检测设备在集料位置处的粉矿的质量达到质量阈值时,促使荧光分析仪对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数;所述当前状态参数包括:粉矿的当前综合品位、粉矿的主元素品位、粉矿的次元素品位以及粉矿的废矿品位。还包括,对智能分选系统内设备的运行位置、皮带转运状态、破碎统计时间、筛分统计时间、球磨统计时间以及分析统计时间进行累加以确定系统延迟时间;基于系统延迟时间范围内的智能分选系统所分选的废石和/或高品位矿石相关的加权综合平均品位和荧光监测仪获取的粉矿的品位分析数据确定特定时刻的粉矿品位与目标品位的第二误差比率;当特定时刻的粉矿品位小于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值增加步长;当特定时刻的粉矿品位大于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值减小步长。
43.在所述第一误差比率在综合误差比率的设定范围内时,等待第三预定时间段,并且在第三预定时间段期满时,促使利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选。还包括确定数据匹配时间段,所述数据匹配时间段为,针对同一批预定粒度的矿石,智能分选系统根据当前品位阈值对预定粒度的矿石进行分选的时刻t1和对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数的时刻t2之间的时间差值。根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长包括:
44.步长n=f(x1,x2,x3,x4,x5,x6,x7)
45.其中,x1为主元素品位与主元素目标品位的误差,x2为第一次元素品位与第一次元素目标品位的误差,x3为第二次元素品位与第二次元素目标品位的误差,x4为当前时刻的高品位矿石的加权综合品位,x5为当前时刻的废石的加权废石品位,x6为高品位矿石的数量占比,x7为当前品位阈值。
46.其中,x1为主参量,以指数关系与x2和x3连用;x4、x5、x6和x7通过拟合函数,构造拟合点,将x1、x2和x3综合计算得到的点映射在拟合点上,最终获得步长n。
47.根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并促使利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并促使利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选。根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行
分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并促使利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,并且在将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿完成后,等待第四预定时间段;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并促使利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,并且在将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿完成后,等待第四预定时间段;其中所述第四预定时间段大于所述数据匹配时间段。
48.根据本发明的再一个方面,提供一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序用于执行上述任一所述的方法。
49.根据本发明的再一个方面,提供一种电子设备,其特征在于,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现上述任一所述的方法。
50.根据本发明的再一方面,提供一种基于智能分选的精矿选矿方法,所述方法包括:步骤201,原矿进行筛分分级后,将符合标准粒度的矿石传送进入智能分选系统;步骤202,智能分选系统根据设定的综合品位阈值t1抛除品位过低的矿石,并且将与综合品位阈值t1相关的计算参数传达到中控系统;步骤203,将智能分选系统选别后的精矿传输至球磨机进行粉碎;步骤204,对球磨机粉碎获得的粉矿进行品位检测,并将检测结果传输到中控系统;步骤205,在获得精矿品位的检测结果后,根据检测结果确定当前品位,并根据当前品位调整综合品位阈值t1相关的计算参数,从而调整综合品位阈值t1。所述步骤202中的智能分选系统为x光智能分选机,包括传感系统、智能识别系统和分离系统。所述x光智能分选机根据x射线穿透矿石时产生的不同程度的衰减强度数据信息所转化的光电数字信号,利用分离系统将废石块和高品位矿石进行分离。经过破碎、筛分的循环控制处理实现所述步骤201中的筛分分级。包含多轮破碎、筛分的循环控制处理。对所述步骤203中进入球磨机之前的磷精矿还进行破碎、筛分的循环控制处理。采用荧光分析仪对粉矿的品位参数进行在线实时监测。在球磨机获得的粉矿皮带上通过负压管道吸取一定量的粉矿并运送至荧光分析仪,所述荧光分析仪对粉矿的品位进行自动分析,并将分析完成的数据实时上传中控系统。中控系统,用于实时接收综合品位数据信息,并反馈到分选系统调整综合矿石品位阈值。所述智能分选系统、球磨机、荧光在线分析仪和中控系统是闭环控制。所述给料系统为振动给料机。所述分选系统,用于通过x射线检测矿石品位,利用分离系统将废石块和高品位矿石进行分离;所述x光智能分选机采集矿石在x光下的衰减信息数据,配合荧光分析仪进行实时的品位分析,反馈到中控系统,采用自学习模型对衰减信息数据和实时品位分析进行训练,从而使得分选系统具有品位预判能力。所述荧光在线分析仪对球磨机获得的粉矿进行在线检测。
51.本技术的在线检测方法为在球磨机获得的粉矿皮带上,布上多个个机械手位置,机械手自动吸取一定量的粉矿,通过负压管道,运送至荧光分析仪的集料位置,然后进行自动分析,分析磷品位,之后将分析完成的数据上传中控系统。本发明提供的磷精矿选矿工艺通过分选系统、球磨机、荧光在线分析仪和中控系统的闭环控制路线,对磷矿石进行智能预
分选,有效控制入浮磷矿品位在一个稳定均值范围内,提高矿石品位。同时,可实现无人化机械作业,工作效率高,大大降低经济和人力成本。
附图说明
52.通过参考下面的附图,可以更为完整地理解本发明的示例性实施方式:
53.图1为根据本发明实施方式的基于阈值的动态调整进行智能分选的方法的流程图;
54.图2为根据本发明另一实施方式的基于阈值的动态调整进行智能分选的方法的流程图;
55.图3为根据本发明实施方式的对阈值进行动态调整的方法的流程图;
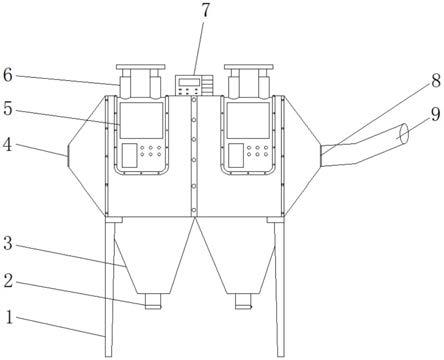
56.图4为根据本发明实施方式的智能分选系统的结构示意图;
57.图5为根据本发明实施方式的基于阈值的动态调整进行智能分选的系统的结构示意图。
具体实施方式
58.下面结合附图对本发明做进一步描述:
59.图1为根据本发明实施方式的基于阈值的动态调整进行智能分选的方法100的流程图。方法100从步骤101处开始。
60.步骤101,利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石。在利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选之前还包括:对待处理的原始矿石进行初始处理,以获得预定粒度的矿石,并将预定粒度的矿石传送给智能分选系统。
61.所述利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选包括:获取每个预定粒度的矿石的综合品位;将综合品位小于当前品位阈值的矿石确定为废矿石,并对废矿石进行抛除;将综合品位等于或大于当前品位阈值的矿石确定为经过分选的矿石。
62.对待处理的原始矿石进行初始处理,以获得预定粒度的矿石包括:对待处理的原始矿石进行多级粒度处理,以获得预定粒度的矿石;其中多级粒度处理中的每级粒度处理包括破碎处理和筛分处理,并且按照粒度处理的从初始到获得预定粒度的矿石的处理顺序,多级粒度处理中的每级粒度处理所获得的矿石的粒度依次减小。
63.其中对待处理的原始矿石进行多级粒度处理包括:将待处理的原始矿石在第一级粒度处理中进行破碎处理,并将经过破碎处理的矿石进行第一级粒度处理中的筛分处理,将能够通过第一级粒度处理中的筛分处理的矿石传送至第二级粒度处理,而将无法通过第一级粒度处理中的筛分处理的矿石继续在第一级粒度处理中进行破碎处理,直至能够通过第一级粒度处理中的筛分处理为止;按照破碎处理和筛分处理的处理顺序,从第二级粒度处理直至多级粒度处理的最后一级粒度处理为止,完成对待处理的原始矿石的初始处理,以获得预定粒度的矿石。
64.图4为根据本发明实施方式的智能分选系统的结构示意图。如图4所示,利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石包括:利
用给料子系统将预定粒度的矿石提供给传输子系统的高速皮带;传输子系统的高速皮带在运送预定粒度的矿石运行预定距离后,进入至平稳状态,并预定粒度的矿石传输至传感子系统;当预定粒度的矿石在皮带的传输下通过传感子系统的射线源正下方时,射线源利用高压激发的x射线照射预定粒度的矿石,穿透预定粒度的矿石的x射线由于所测元素含量的不同而产生不同程度的衰减;由传感子系统的位于皮带下方的探测器采集衰减数据信息,将衰减数据信息转化为光电数字信号,并将光电数字信号传送给智能识别系统的智能识别子系统;智能识别子系统基于光电数字信号生成待识别成像,并对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数,基于当前品位阈值确定当前分选参数,将矿石参数与当前分选参数进行比较,以基于比较结果将预定粒度的矿石标记为废石或高品位矿石,将标记为高品位矿石的矿石的位置信息发送给分离子系统的喷吹控制单元;当预定粒度的矿石在传输子系统的皮带输送下到达预定位置时,分离子系统的气排枪在喷吹控制单元的控制下,通过气排枪的喷嘴喷吹被标记为高品位矿石或废石的预定粒度的矿石,从而将废石和高品位矿石进行分选,实现对预定粒度的矿石进行分选,以输出经过分选的矿石。
65.在对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数之后还包括:
66.将综合品位小于当前品位阈值的预定粒度的矿石确定为废石,并且将综合品位大于或等于当前品位阈值的预定粒度的矿石确定为高品位矿石;
67.获取第一预定时间段内进入智能分选系统的每颗废石的综合品位值和质量,并且获取第一预定时间段内进入智能分选系统的每颗高品位矿石的综合品位值和质量;
68.基于每颗废石的综合品位值和质量,计算第一预定时间段内废石的加权平均综合品位
69.其中,kf
i
为第一预定时间段内第i颗废石的综合品位系数,mf
i
为第一预定时间段内第i颗废石的质量系数,nf为第一预定时间段内废石的数量;
70.基于每颗高品位矿石的综合品位值和质量,计算第一预定时间段内高品位矿石的加权平均综合品位
71.其中,ky
i
为第一预定时间段内第i颗高品位矿石的综合品位系数,my
i
为第一预定时间段内第i颗高品位矿石的质量系数,ny为第一预定时间段内废石的数量。
72.步骤102,将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿。其中将所述智能分选系统输出的经过分选的矿石进行粉碎包括:利用球磨机将所述智能分选系统输出的经过分选的矿石进行粉碎。智能分选系统为x光智能分选机。
73.将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿包括:对所述智能分选系统输出的经过分选的矿石的粒度进行判断,当粒度大于球磨阈值时,对粒度大于球磨阈值的矿石进行破碎,直至粒度小于或等于球磨阈值为止;当粒度小于球磨阈值时,利用球磨机对粒度小于球磨阈值的矿石进行粉碎,以获得粉矿。
74.步骤103,对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数,其中所述当前状态参数包括所述粉矿的当前综合品位。其中对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数包括:在第二预定时间段内,在利用多个机械手中的每个机械手从输送粉矿的皮带上,按照预定时间间隔获取预定质量的粉矿;促使每个机械手将所获取的预定质量的粉矿,通过负压管道输送给荧光分析仪的集料位置;在集料位置处的粉矿的质量
达到质量阈值时,促使荧光分析仪对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数;所述当前状态参数包括:粉矿的当前综合品位、粉矿的主元素品位、粉矿的次元素品位以及粉矿的废矿品位。
75.还包括,对智能分选系统内设备的运行位置、皮带转运状态、破碎统计时间、筛分统计时间、球磨统计时间以及分析统计时间进行累加以确定系统延迟时间;基于系统延迟时间范围内的智能分选系统所分选的废石和/或高品位矿石相关的加权综合平均品位和荧光监测仪获取的粉矿的品位分析数据确定特定时刻的粉矿品位与目标品位的第二误差比率;当特定时刻的粉矿品位小于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值增加步长;当特定时刻的粉矿品位大于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值减小步长。
76.步骤104,基于当前综合品位和目标综合品位计算当前综合品位的第一误差比率,在所述第一误差比率不在综合误差比率的设定范围内时,根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长。
77.在所述第一误差比率在综合误差比率的设定范围内时,等待第三预定时间段,并且在第三预定时间段期满时,进行步骤101。
78.还包括确定数据匹配时间段,所述数据匹配时间段为,针对同一批预定粒度的矿石,智能分选系统根据当前品位阈值对预定粒度的矿石进行分选的时刻t1和对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数的时刻t2之间的时间差值。
79.根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长包括:
80.步长n=f(x1,x2,x3,x4,x5,x6,x7)
81.其中,x1为主元素品位与主元素目标品位的误差,x2为第一次元素品位与第一次元素目标品位的误差,x3为第二次元素品位与第二次元素目标品位的误差,x4为当前时刻的高品位矿石的加权综合品位,x5为当前时刻的废石的加权废石品位,x6为高品位矿石的数量占比,x7为当前品位阈值。
82.其中,x1为主参量,以指数关系与x2和x3连用;x4、x5、x6和x7通过拟合函数,构造拟合点,将x1、x2和x3综合计算得到的点映射在拟合点上,最终获得步长n。
83.步骤105,根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选。
84.根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:
85.在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101。根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使
得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,
86.将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101,并且在步骤102完成后,等待第四预定时间段;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101,并且在步骤102完成后,等待第四预定时间段;其中所述第四预定时间段大于所述数据匹配时间段。所述智能分选系统、球磨机和荧光在线分析仪为闭环控制。
87.图2为根据本发明另一实施方式的基于阈值的动态调整进行智能分选的方法的流程图。以下以磷矿为例进行说明,应当了解的是本技术并不限于磷矿,而是可以适用于多种矿物。
88.第一步骤,对原矿进行筛分分级,经过破碎和筛分的循环控制实现筛分分级后,通过给料系统将合适的标准粒度的矿石传送进入分选系统。
89.破碎和筛分的循环控制具体为:将原矿投入破碎机进行破碎,破碎后的矿石进入筛分系统。作为示例,筛分系统可以是一个振动筛,包括两层筛网,第一层筛网的孔径大于第二层筛网的孔径。例如,矿石粒度为10
‑
30mm,则,第一层筛网孔径为30mm,第二层筛网孔径为10mm,过程中所有矿石会先倾倒在第一层筛网上,经过振动,小于30mm的会掉落在第二层筛网上,大于30mm的会随着振动进入专门的转运皮带,继续运回到破碎机再次进行循环破碎。掉落在第二层筛网的矿石,会随着振动,小于10mm的矿石从第二层筛网掉落在粉矿皮带上,转运到粉矿收集仓,而留在第二层筛网上的为10
‑
30mm的矿石,将随着振动进入专门的转运皮带,转运到分选系统进行分选。
90.优选地,可以根据矿石情况设置多轮破碎
‑
筛分的循环控制,参考图2,原矿先经过初破、筛分1,筛选出粒度小于n1mm的矿石;再经过中破、筛分2,筛选出粒度小于n2mm的矿石。
91.第二步骤,智能分选系统对每一颗矿石进行检测,根据设定的标准阈值抛除品位过低的矿石,同时将品位定义参数传达到中控系统。
92.分选系统采用x光智能分选机。如图4所示,x光智能分选机由给料系统、传输系统、传感系统、智能识别系统和分离系统构成。根据第一步洲筛选分级后的矿石经给料系统给入传输系统的高速皮带,运行一定距离后调整至平稳状态,并传输至传感系统。当矿石通过射线源正下方时,由高压激发的x射线照射,皮带上的矿石块会减弱射线强度,使穿透矿石的x射线因石块中所测元素含量的高低而产生不同程度的衰减。皮带下方的探测器采集衰减强度数据信息,将其转化为光电数字信号传送给智能识别系统的工控机。工控机中运行智能分选软件,对数据进行成像处理并进行分析识别,根据预先设定的分选参数,判别并标记矿石块为废石或高品位矿石,同时把已标记的矿石位置信息发送给分离系统的喷吹控制单元。当矿石块飞离传输系统的皮带后,将经过分离系统的气排枪,通过气排枪的喷嘴精准地喷吹已标记的高品位矿石或废石,从而将废石块和高品位矿石进行分离。
93.在上述分选过程中,x光智能分选机的智能分选软件会将t时间周期内进入分选设备的综合品位k低于阈值th1(废石)的每一颗矿石的综合品位值以及质量,综合品位高于阈值th1(矿石)的每一颗矿石的综合品位值以及质量传至中控系统。由中控系统计算出此时
间周期内废石的加权平均综合品位,k为每一颗废石由智能分选模型计算得到的综合品位系数,m为每一颗废石由智能分选模型计算得到的质量系数;用同样的流程计算出此时间周期内矿石的加权平均综合品位,以及原矿的加权综合平均品位,以及矿石的加权质量。其中综合品位k由智能分选模型基于每一颗矿石的x光衰减信号计算得到。
94.第三步骤,智能分选系统选别完以后的磷精矿进入球磨机粉碎。在实际操作中,如果经过分选的磷精矿粒度仍然较大,可将此矿石再次进行细破筛分后,运送到球磨机进行粉碎,如图2所示,经过智能分选机分选后的矿石还可经过细破、筛分2的循环控制之后,再进入球磨机粉碎。
95.第四步骤,对球磨机获得的粉矿进行实时检测,并将检测结果以时间为标记传输到中控系统,检测的元素内容由中控系统进行预先设定,可根据客户需求进行配置。中控系统是一个中央数据处理、存储和状态展示平台,子系统的数据集中到这里进行匹配计算,并且需要与子系统进行通信的通信功能、具有实时状态展示、子系统控制以及一定程度上的人为接入能力。
96.作为优选,采用荧光分析仪对粉矿进行在线检测,在球磨机获得的粉矿皮带上,布置多个(例如,f个)机械手位置,机械手按照预定时间间隔自动吸取一定量的粉矿,并将吸取的粉矿通过负压管道运送至荧光分析仪的集料位置,然后进行自动分析,分析由中控系统指定的元素的品位,之后将分析完成的数据以时间为标签上传中控系统。
97.第五步骤:中控系统根据设备运行位置、皮带转运状态、破碎、筛分统计时间以及球磨以及分析统计时间累加系统时间误差后,匹配时间误差范围内的分选系统上传废石、精矿相关的加权综合平均品位以及荧光在线检测系统获取的精矿粉品位分析数据,如某一时刻精矿粉品位小于目标品位超出误差delta,则以误差范围为步长函数,增大阈值th1,使得更多低综合品位原矿进入废石中。误差越大,相对应的步长也越大,通过闭环反馈,最终使得精矿粉品位位于目标品位误差delta范围内。反之,则减小阈值th1,具体控制步骤同上。
98.第六步骤,中控系统将计算后的调整的阈值th1反馈至智能分选系统,智能分选系统对判定为尾矿的标准阈值进行调整,使得最终进入浮选池的粉矿品位恒定。中控计算得到新的阈值th1下发给分选系统,由分选系统根据调整的阈值th1进行分选。
99.例如,假设初始标准阈值设置为阈值th1,可能出现以下情况:以磷品位为例,两个磷矿石生产班次,进入分选机的磷矿平均品位值均为k,但是第一班次综合品位大于阈值th1的进入精矿的磷品位都是略高于k,进入废石的磷品位略低于k,均值为k。第二班次,大于综合品位阈值th1的进入精矿的磷品位都是远高于k,进入废石的磷品位远低于k,均值依然为k。
100.这种情况下,如果不调整分选系统的标准的阈值th1,将导致两个班次的矿石经过分选系统分选后进入浮选池的粉矿品位差异会非常大,导致浮选效果会收到很大影响。
101.为了避免这种情况,中控系统在接收到荧光在线分析仪反馈的第一班次磷品位数据信息后,再将数据信息反馈到分选系统,分选系统对判定为尾矿的标准阈值经过智能分析后进行适当的调整,就能够使后续进入浮选的磷品位与之前次进入浮选的磷品位保持一致。即,以t为时间间隔实时调整阈值th1。
102.第七步骤,稳定品质的粉矿进入浮选系统。根据本发明提供的方法流程,使得不同
班次进入浮选系统的粉矿品位基本一致,浮选时就不需要经常调整浮选的化学试剂配比,能使浮选效果达到最优,且减少能耗。本发明通过x光智能分选机、荧光在线分析仪的中控联动,由x光智能分选机采集矿石再x光下的衰减信息数据,配合荧光分析仪实时的品位分析反馈,采用自学习模型对衰减信息数据和实时品位分析进行训练,从而使得智能分选设备具有品位预判能力。本发明通过荧光分析仪对进入浮选的粉矿的实时监控,随时调整光选机对矿石判定为废石的阈值的调整,实现粉矿的品位稳定。
103.图3为根据本发明实施方式的对阈值进行动态调整的方法的流程图。
104.步骤301,利用荧光在线分析仪对球磨机所获得的粉矿进行实时检测,并将检测结果标记时间。
105.步骤302,将标记了时间检测结果传输给中控系统。所检测的元素内容由中控系统进行预先设定,并且可根据客户需求进行配置。中控系统是中央数据处理、存储和状态展示平台。子系统的数据集中到这里进行匹配计算,并且中控系统具有与子系统进行通信的通信功能、具有实时状态展示、子系统控制以及一定程度上的人为接入功能。
106.预选地,在采用荧光在线分析仪对粉矿进行在线检测或实时检测时,在球磨机获得的粉矿皮带上,利用在多个位置预先布置的多个(例如,f个)机械手按照预定时间间隔自动吸取一定量的粉矿,并将吸取的粉矿通过负压管道运送至荧光在线分析仪的集料位置。然后,荧光在线分析仪对集料位置处的粉矿进行检测,以确定由中控系统指定的或预先选定的元素的品位。随后,将由中控系统指定的或预先选定的元素的品位进行时间标记,并将标记了时间的由中控系统指定的或预先选定的元素的品位上传中控系统。
107.步骤303,中控系统根据从荧光在线分析仪接收的标记了时间的由中控系统指定的或预先选定的元素的品位进行计算,以得到粉矿的当前品位,确定当前品位是否在入浮品质目标复查范围内,即确定当前品位是否在预定品位范围内,例如,当前品位为27%,而预定品位范围为大于或等于32%,则当前品位不在预定品位范围内。
108.如果当前品位在入浮品质目标复查范围内,即确定当前品位在预定品位范围内,则进行步骤304,等待时间间隔t,在等待时间间隔t期满时,进行步骤301,以实现对粉矿品位的实时(循环)检测。如在误差范围内,则,间隔一定的t时刻后继续取样。整个调节过程的控制由荧光在线分析取样发起,这里的t为一个相对较长的时间。一般采用20分钟、30分钟或60分钟等为间隔。
109.如果当前品位不在入浮品质目标复查范围内,即确定当前品位不预定品位范围内,则进行步骤305;
110.步骤305,中控系统根据设备运行位置、皮带转运状态、破碎、筛分统计时间以及球磨以及分析统计时间累加系统时间误差后,匹配时间误差范围内的分选系统上传废石、精矿相关的加权综合平均品位以及荧光在线检测系统获取的精矿粉品位分析数据,如某一时刻精矿粉品位小于目标品位或精矿粉品位与目标品位偏差的超出误差阈值,则当前时刻的精矿粉品位与目标品位偏差的超出误差阈值),则以误差范围为步长函数,增大阈值th1。使得更多低综合品位原矿进入废石中。误差越大,相对应的步长也越大,通过闭环反馈,最终使得精矿粉品位位于目标品位误差阈值delta范围内。反之,则减小阈值th1,具体控制步骤同上。
111.步骤306,中控系统将计算后的调整的阈值th1反馈至智能分选系统,智能分选系
统对判定为尾矿的标准阈值进行调整,使得最终进入浮选池的粉矿品位恒定。中控计算得到新的阈值th1下发给分选系统,由分选系统根据调整的阈值th1进行分选。
112.应当了解的是,在本技术的技术方案中,需要注意信息匹配时候的时间差。时间的触发发起为荧光在线检测完成t0时刻的检测,这个t是抓取矿粉样本的时间,本身的检测还需要一定的时间。然后去匹配智能分选系统上传的矿石信息需要匹配t0
‑
t1时刻的。这里的t1是矿石从智能分选机经过后续工序以矿粉的形式运动到荧光在线分析仪的机械臂位置所需要的时间。中控机会依据品位误差程度、匹配上时刻的矿石加权综合品位、匹配上时刻的当下阈值th1,计算出th1的运动步长
113.步长n=f(x1,x2,x3,x4,x5,x6,x7)
114.其中,x1为主元素p品位与目标品位的误差(%),x2为mg元素品位与目标品位的误差(%),x3为al元素品位与目标品位的误差(%),x4为该时刻精矿加权综合品位,x5为该时刻加权废石品位,x6为精矿数量占比,x7为该时刻采用th1值,x2,x3的输入可以为零,则表示不关注次要元素。其中x1为主参量,以指数关系与x2和x3连用;x4、x5、x6和x7通过拟合函数,构造拟合点,将x1、x2和x3综合计算得到的点映射在拟合点上,最终获得步长n。
115.此公式用以计算变化步长n,中控将计算更新后的th1 n返回智能分选系统,更改系统阈值设置,使得系统新采用的th1=th1 n。n的正负,及具体值由函数f计算后得出。当程序进入调整流程后,荧光在线分析仪采样时间t将被置为较短的一个时间间隔,如10分钟。直到连续三次荧光分析仪数据都在目标误差范围内时,采样时间间隔恢复到t。其中智能分选机的数据一直在实时上传到中控,整个流程开始的时候,以荧光仪的时间戳去匹配中控中储存的智能分选系统的数据。
116.例如,假设初始标准阈值设置为阈值th1,可能出现以下情况:以磷品位为例,两个磷矿石生产班次,进入分选机的磷矿平均品位值均为k,但是第一班次综合品位大于阈值th1的进入精矿的磷品位都是略高于k,进入废石的磷品位略低于k,均值为k。第二班次,大于综合品位阈值th1的进入精矿的磷品位都是远高于k,进入废石的磷品位远低于k,均值依然为k。这种情况下,如果不调整分选系统的标准的阈值th1,将导致两个班次的矿石经过分选系统分选后进入浮选池的粉矿品位差异会非常大,导致浮选效果会收到很大影响。为了避免这种情况,中控系统在接收到荧光在线分析仪反馈的第一班次磷品位数据信息后,再将数据信息反馈到分选系统,分选系统对判定为尾矿的标准阈值经过智能分析后进行适当的调整,就能够使后续进入浮选的磷品位与之前次进入浮选的磷品位保持一致。即,以t为时间间隔实时调整阈值th1。
117.图5为根据本发明实施方式的基于阈值的动态调整进行智能分选的系统500的结构示意图。系统500包括:分选设备501、粉碎设备502、检测设备503、计算设备504以及调整设备505。
118.分选设备501,利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石。在利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选之前还包括:对待处理的原始矿石进行初始处理,以获得预定粒度的矿石,并将预定粒度的矿石传送给智能分选系统。所述利用智能分选系统根据当前的品位阈值对预定粒度的矿石进行分选包括:获取每个预定粒度的矿石的综合品位;将综合品位小于当前品位阈值的矿石确定为废矿石,并对废矿石进行抛除;将综合品位等于或大于当前品位阈值的矿石
确定为经过分选的矿石。
119.对待处理的原始矿石进行初始处理,以获得预定粒度的矿石包括:对待处理的原始矿石进行多级粒度处理,以获得预定粒度的矿石;其中多级粒度处理中的每级粒度处理包括破碎处理和筛分处理,并且按照粒度处理的从初始到获得预定粒度的矿石的处理顺序,多级粒度处理中的每级粒度处理所获得的矿石的粒度依次减小。
120.其中对待处理的原始矿石进行多级粒度处理包括:将待处理的原始矿石在第一级粒度处理中进行破碎处理,并将经过破碎处理的矿石进行第一级粒度处理中的筛分处理,将能够通过第一级粒度处理中的筛分处理的矿石传送至第二级粒度处理,而将无法通过第一级粒度处理中的筛分处理的矿石继续在第一级粒度处理中进行破碎处理,直至能够通过第一级粒度处理中的筛分处理为止;按照破碎处理和筛分处理的处理顺序,从第二级粒度处理直至多级粒度处理的最后一级粒度处理为止,完成对待处理的原始矿石的初始处理,以获得预定粒度的矿石。
121.利用智能分选系统根据当前品位阈值对预定粒度的矿石进行分选,以输出经过分选的矿石包括:利用给料子系统将预定粒度的矿石提供给传输子系统的高速皮带;传输子系统的高速皮带在运送预定粒度的矿石运行预定距离后,进入至平稳状态,并预定粒度的矿石传输至传感子系统;当预定粒度的矿石在皮带的传输下通过传感子系统的射线源正下方时,射线源利用高压激发的x射线照射预定粒度的矿石,穿透预定粒度的矿石的x射线由于所测元素含量的不同而产生不同程度的衰减;由传感子系统的位于皮带下方的探测器采集衰减数据信息,将衰减数据信息转化为光电数字信号,并将光电数字信号传送给智能识别系统的智能识别子系统;智能识别子系统基于光电数字信号生成待识别成像,并对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数,基于当前品位阈值确定当前分选参数,将矿石参数与当前分选参数进行比较,以基于比较结果将预定粒度的矿石标记为废石或高品位矿石,将标记为高品位矿石的矿石的位置信息发送给分离子系统的喷吹控制单元;当预定粒度的矿石在传输子系统的皮带输送下到达预定位置时,分离子系统的气排枪在喷吹控制单元的控制下,通过气排枪的喷嘴喷吹被标记为高品位矿石或废石的预定粒度的矿石,从而将废石和高品位矿石进行分选,实现对预定粒度的矿石进行分选,以输出经过分选的矿石。
122.在对待识别图像进行内容识别以确定预定粒度的矿石的矿石参数之后还包括:将综合品位小于当前品位阈值的预定粒度的矿石确定为废石,并且将综合品位大于或等于当前品位阈值的预定粒度的矿石确定为高品位矿石;获取第一预定时间段内进入智能分选系统的每颗废石的综合品位值和质量,并且获取第一预定时间段内进入智能分选系统的每颗高品位矿石的综合品位值和质量;
123.基于每颗废石的综合品位值和质量,计算第一预定时间段内废石的加权平均综合品位
124.其中,kf
i
为第一预定时间段内第i颗废石的综合品位系数,mf
i
为第一预定时间段内第i颗废石的质量系数,nf为第一预定时间段内废石的数量;
125.基于每颗高品位矿石的综合品位值和质量,计算第一预定时间段内高品位矿石的加权平均综合品位
126.其中,ky
i
为第一预定时间段内第i颗高品位矿石的综合品位系数,my
i
为第一预定时间段内第i颗高品位矿石的质量系数,ny为第一预定时间段内废石的数量。
127.粉碎设备502,将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿。其中将所述智能分选系统输出的经过分选的矿石进行粉碎包括:利用球磨机将所述智能分选系统输出的经过分选的矿石进行粉碎。智能分选系统为x光智能分选机。
128.将所述智能分选系统输出的经过分选的矿石进行粉碎,以获得粉矿包括:对所述智能分选系统输出的经过分选的矿石的粒度进行判断,当粒度大于球磨阈值时,对粒度大于球磨阈值的矿石进行破碎,直至粒度小于或等于球磨阈值为止;当粒度小于球磨阈值时,利用球磨机对粒度小于球磨阈值的矿石进行粉碎,以获得粉矿。
129.检测设备503,对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数,其中所述当前状态参数包括所述粉矿的当前综合品位。其中对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数包括:在第二预定时间段内,在利用多个机械手中的每个机械手从输送粉矿的皮带上,按照预定时间间隔获取预定质量的粉矿;促使每个机械手将所获取的预定质量的粉矿,通过负压管道输送给荧光分析仪的集料位置;在集料位置处的粉矿的质量达到质量阈值时,促使荧光分析仪对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数;所述当前状态参数包括:粉矿的当前综合品位、粉矿的主元素品位、粉矿的次元素品位以及粉矿的废矿品位。
130.还包括,对智能分选系统内设备的运行位置、皮带转运状态、破碎统计时间、筛分统计时间、球磨统计时间以及分析统计时间进行累加以确定系统延迟时间;基于系统延迟时间范围内的智能分选系统所分选的废石和/或高品位矿石相关的加权综合平均品位和荧光监测仪获取的粉矿的品位分析数据确定特定时刻的粉矿品位与目标品位的第二误差比率;当特定时刻的粉矿品位小于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值增加步长;当特定时刻的粉矿品位大于目标品位,并且第二误差比率大于误差比率的设定范围时,则基于第二误差比率确定步长函数并通过步长函数确定多个步长,以预定时间间隔为当前品位阈值减小步长。
131.计算设备504,基于当前综合品位和目标综合品位计算当前综合品位的第一误差比率,在所述第一误差比率不在综合误差比率的设定范围内时,根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长。
132.在所述第一误差比率在综合误差比率的设定范围内时,等待第三预定时间段,并且在第三预定时间段期满时,进行步骤101。
133.还包括确定数据匹配时间段,所述数据匹配时间段为,针对同一批预定粒度的矿石,智能分选系统根据当前品位阈值对预定粒度的矿石进行分选的时刻t1和对所述粉矿进行品位检测,以获得所述粉矿的当前状态参数的时刻t2之间的时间差值。根据所述粉矿的当前状态参数计算用于品位阈值的动态调整步长包括:
134.步长n=f(x1,x2,x3,x4,x5,x6,x7)
135.其中,x1为主元素品位与主元素目标品位的误差,x2为第一次元素品位与第一次元素目标品位的误差,x3为第二次元素品位与第二次元素目标品位的误差,x4为当前时刻的高品位矿石的加权综合品位,x5为当前时刻的废石的加权废石品位,x6为高品位矿石的
数量占比,x7为当前品位阈值。
136.其中,x1为主参量,以指数关系与x2和x3连用;x4、x5、x6和x7通过拟合函数,构造拟合点,将x1、x2和x3综合计算得到的点映射在拟合点上,最终获得步长n。
137.调整设备505,根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选。
138.根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101。根据所述动态调整步长和当前品位阈值进行动态调整以获得经过调整的当前品位阈值,以使得智能分选系统根据调整的当前品位阈值对所述预定粒度的矿石进行分选包括:在当前综合品位小于目标综合品位时,将当前品位阈值与动态调整步长相加以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101,并且在步骤102完成后,等待第四预定时间段;在当前综合品位大于目标综合品位时,将当前品位阈值减去动态调整步长以作为经过调整的当前品位阈值,将经过调整的当前品位阈值作为当前品位阈值,并进行步骤101,并且在步骤102完成后,等待第四预定时间段其中所述第四预定时间段大于所述数据匹配时间段。所述智能分选系统、球磨机和荧光在线分析仪为闭环控制。
139.根据上述说明书的揭示和教导,本发明所属领域的技术人员还能够对上述实施方案方式进行变更和修改。但是,本发明并不局限于上述的具体实施方式,凡是本领域技术人员在本发明的基础上所作出的任何显而易见的改进、替换或变型均属于本发明的保护范围。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。