1.本技术涉及垃圾回收的领域,尤其是涉及一种海绵包块破碎回收线。
背景技术:
2.海绵是一种多孔材料,具有良好的吸水性,能够用于清洁物品,当海绵成为废弃物之后,需要对海绵进行回收。由于海绵的体积较大,为了减少运输成本,回收人员通常会使用金属绑带将海绵压缩打包成海绵包块。
3.海绵制品工厂对回收的海绵进行再利用之前,首先会将海绵包块投入破碎机内进行破碎。然而,当海绵包块进入破碎机后,金属绑带被弄断,海绵包就会在破碎机的进料斗内迅速松开、膨胀,对破碎机产生很大的作用力,且海绵在进料斗内容易形成隆空,导致破碎机对海绵包块的破碎效果较差。
技术实现要素:
4.为了提高破碎机对海绵包块的破碎效果,本技术提供一种海绵包块破碎回收线。
5.本技术提供的一种海绵包块破碎回收线采用如下的技术方案:
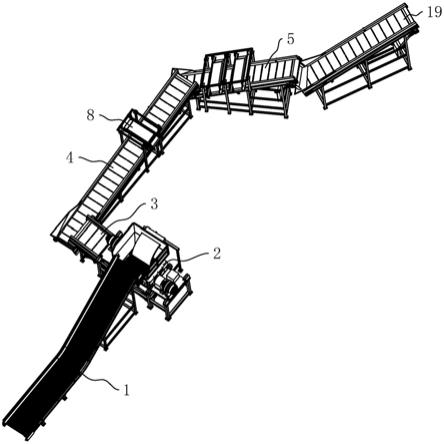
6.一种海绵包块破碎回收线,包括依次设置的第一输送带、双轴破碎机、第二输送带、第三输送带、第四输送带,所述双轴破碎机包括破碎机机体和进料斗,所述破碎机机体外侧壁转动连接有两个转动臂,两个转动臂之间连接有弧型的压板,所述进料斗相对压板的一侧开有让位口,所述压板穿过让位口延伸至进料斗内,所述破碎机机体的外侧壁转动连接有油缸,所述油缸的活塞杆转动连接在压板上。
7.通过采用上述技术方案,当海绵包块掉入进料斗内后,油缸的活塞杆缩回,油缸的活塞杆通过压板带动转动臂转动,压板转入进料斗内对进料斗内的海绵包块实现压料,以此减小了海绵包块在进料斗内架空,导致双轴破碎机空运行的可能性,有利于提高双轴破碎机对海绵包块的破碎效果。
8.可选的,所述破碎机机体底部的出料口处连接有挡料罩,所述挡料罩上连接有光电传感器,所述光电传感器和第一输送带均电连接于控制系统。
9.通过采用上述技术方案,光电传感器能够检测双轴破碎机的出料口处是否有海绵和金属绑带碎块出料,当没有海绵和金属绑带碎块掉落时,光电传感器通过控制系统使得第一输送带停止运行。
10.可选的,所述第四输送带包括支撑架、转动穿设在支撑架上的传动辊和磁辊,所述传动辊和磁辊相互平行且水平设置,所述传动辊和磁辊之间套设有传送带,所述支撑架上连接有电机,所述电机的输出轴穿过支撑架并同轴连接于磁辊,所述支撑架上还连接有承载架,所述承载架上连接有位于传送带上方的皮带磁选机,所述支撑架相对磁辊下方的位置设置有导料件。
11.通过采用上述技术方案,海绵包块由第一输送带输送至双轴破碎机内破碎,破碎后的海绵和金属绑带碎块通过第二输送带输送至第三输送带上。启动电机,电机的输出轴
带动磁辊转动,磁辊通过传送带带动传动辊转动,传送带上的海绵和金属绑带碎块沿着传动辊至磁辊的方向运动,此过程中,支撑架上的皮带磁选机能够对表面海绵中的金属绑带碎块进行吸附。当海绵运动至磁辊处时,海绵直接从传送带上掉落,而底层海绵中的金属绑带碎块在磁辊的吸附作用下,转过磁辊并逐渐远离磁辊,当金属绑带碎块距离磁辊足够远时,金属绑带碎块自动掉落至第一滑道上,然后顺着第一滑道和第二滑道实现落料。
12.可选的,所述传送带上沿其运动方向连接有若干个限位凸条,所述限位凸条平行于传送带的宽度方向。
13.通过采用上述技术方案,由于金属绑带碎块转过磁辊后仍然受磁辊的吸附作用,因此金属绑带碎块可能始终吸附在传送带上相对磁辊底部的位置。限位凸条的设置能够带动金属绑带碎块远离磁辊,以此确保金属绑带碎块与磁辊实现分离。
14.可选的,所述导料件包括一体设置的第一滑道和第二滑道,所述第二滑道竖向设置且顶端连接于第一滑道的底端,所述第一滑道远离第二滑道的一端位于磁辊的下方,所述第一滑道沿着磁辊至传动辊的方向朝向下倾斜。
15.通过采用上述技术方案,磁辊磁选出来的金属绑带碎块掉落至第一滑道内,然后顺着第一滑道和第二滑道实现出料。
16.可选的,所述第一滑道朝向传送带的一侧开口。
17.通过采用上述技术方案,有利于增长第一滑道上进料口在传送带上投影的长度,以此确保金属绑带碎块距离磁辊足够远时,仍然能够掉落至第一滑道内。
18.可选的,所述传送带宽度方向的两侧分别设置有限位组件,所述限位组件包括若干个沿传送带运动方向设置的限位片,若干个限位片依次首尾紧贴,所述限位片的底端连接在传送带上。
19.通过采用上述技术方案,限位片的设置对传送带上的海绵和金属绑带碎块起限位作用,减小了海绵和金属绑带碎块掉出传送带的可能性。
20.可选的,电连接于控制系统的光电传感器位于第一输送带、第二输送带、第三输送带、第四输送带上均设置有一个,所述皮带磁选机电连接于控制系统。
21.通过采用上述技术方案,光电传感器能够对是否有海绵和金属绑带碎块通过进行检测,当没有检测到海绵和金属绑带碎块通过时,说明设备发生损坏,以此对应的光电传感器能够通过控制系统关闭位于损坏设备之前的设备,而位于其后面的输送带能够继续工作。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.当海绵包块掉入进料斗内后,油缸的活塞杆缩回,油缸的活塞杆通过压板带动转动臂转动,压板转入进料斗内对进料斗内的海绵包块实现压料,以此减小了海绵包块在进料斗内架空,导致双轴破碎机空运行的可能性,有利于提高双轴破碎机对海绵包块的破碎效果;
24.2.通过皮带磁选机和磁辊的设置,能够对海绵堆内的金属绑带碎块实现分层吸附,从而提高了海绵与金属绑带碎块的分选效果;
25.3.由于金属绑带碎块转过磁辊后仍然受磁辊的吸附作用,因此金属绑带碎块可能始终吸附在传送带上相对磁辊底部的位置。限位凸条的设置能够带动金属绑带碎块远离磁辊,以此确保金属绑带碎块与磁辊实现分离;
26.4.有利于增长第一滑道进料口在传送带上投影的长度,以此确保金属绑带碎块距离磁辊足够远时,仍然能够掉落至第一滑道内;
27.5.光电传感器能够检测双轴破碎机的出料口处是否有海绵和金属绑带碎块出料,当没有海绵和金属绑带碎块掉落时,光电传感器通过控制系统使得第一输送带停止运行。
附图说明
28.图1是用于体现本技术的结构示意图;
29.图2是用于体现本技术中双轴破碎机的结构示意图;
30.图3是用于体现本技术中皮带磁选机的结构示意图;
31.图4是用于体现本技术中磁辊的结构示意图。
32.附图标记说明:1、第一输送带;2、双轴破碎机;3、第二输送带;4、第三输送带;5、第四输送带;61、支撑架;62、传动辊;63、磁辊;64、传送带;65、电机;7、承载架;8、皮带磁选机;9、限位凸条;101、第一滑道;102、第二滑道;11、限位片;12、破碎机机体;13、进料斗;14、转动臂;15、压板;131、让位口;16、油缸;17、挡料罩;18、光电传感器;19、第五输送带。
具体实施方式
33.以下结合附图1
‑
4对本技术作进一步详细说明。
34.本技术实施例公开一种海绵包块破碎回收线。参照图1,海绵包块破碎回收线包括依次设置的第一输送带1、双轴破碎机2、第二输送带3、第三输送带4、第四输送带5。
35.参照图1和图2,第一输送带1采用现有技术中常用的输送带,双轴破碎机2采用现有技术中常用的双轴颚式破碎机。第一输送带1的一端位于双轴破碎机2的上方。操作人员将海绵包块放在第一输送带1上,然后通过第一输送带1将海绵包块传送至双轴破碎机2内破碎。
36.参照图2,双轴破碎机2包括破碎机机体12和进料斗13,破碎机机体12外侧壁上转动连接有两个转动臂14,两个转动臂14之间固定连接有弧型的压板15,压板15的弧心朝向地面。
37.参照图2,进料斗13相对压板15的一侧开有让位口131,压板15穿过让位口131延伸至进料斗13内。破碎机机体12的外侧壁转动连接有油缸16,油缸16的活塞杆转动连接在压板15上。
38.参照图2,当海绵包块掉入进料斗13内后,油缸16的活塞杆缩回,油缸16的活塞杆通过压板15带动转动臂14转动,压板15转入进料斗13内对进料斗13内的海绵包块实现压料,以此减小了海绵包块在进料斗13内架空,导致双轴破碎机2空运行的可能性,有利于提高双轴破碎机2对海绵包块的破碎效果。
39.参照图2,第二输送带3采用现有技术中常用的输送带即可,第二输送带3的一端位于双轴破碎机2出料口的正下方,双轴破碎机2内破碎后的海绵和金属绑带碎块掉落至第二输送带3上并由第二输送带3输送。
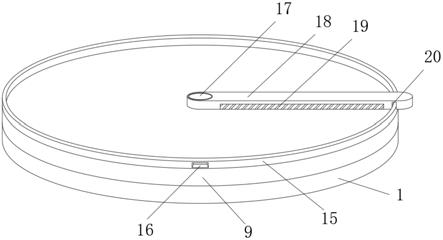
40.参照图2,破碎机机体12底部的出料口处栓接有挡料罩17,挡料罩17的设置对双轴破碎机2内破碎后海绵和金属绑带碎块的出料起限位作用,减小了海绵和金属绑带碎块掉出第二输送带3的可能性。
41.参照图2,挡料罩17上栓接有光电传感器18,光电传感器18和第一输送带1均电连接于控制系统。光电传感器18能够检测到双轴破碎机2的出料口处海绵和金属绑带碎块的落料,以此当没有海绵和金属绑带碎块掉落时,光电传感器18通过控制系统使得第一输送带1停止运行。
42.参照图1,第三输送带4的一端位于第二输送带3远离双轴破碎机2一端的下方,以此第二输送带3将海绵和金属绑带碎块输送至第三输送带4上。
43.参照图1和图3,第三输送带4采用现有技术中常用的输送带,第三输送带4上设置有皮带磁选机8,皮带磁选机8能够对第三输送带4上表层海绵中的金属绑带碎块实现吸附,从而实现了初步的分选,初步分选后的海绵掉落至第四输送带5上。
44.参照图3和图4,第四输送带5包括支撑架61、传动辊62、磁辊63、传送带64、电机65。支撑架61放置在地面上,传动辊62平行于磁辊63且相互水平设置,传动辊62和磁辊63均转动穿设在支撑架61上,传送带64套设在传动辊62和磁辊63之间。
45.参照图3和图4,支撑架61上栓接有电机65,电机65的输出轴穿过支撑架61并同轴连接于磁辊63的一端。启动电机65,电机65的输出轴带动磁辊63转动,磁辊63通过传送带64带动传动辊62转动,传送带64上的海绵和金属绑带碎块由传动辊62至磁辊63的方向运动。
46.参照图3和图4,支撑架61上还栓接有承载架7,皮带磁选机8在承载架7上栓接有一个,皮带磁选机8位于传送带64的上方。当传送带64带动金属绑带碎块从皮带磁选机8的下方通过时,皮带磁选机8能够对表层海绵中的金属绑带碎块实现吸附,以此对金属绑带碎块实现二次分选。
47.参照图3和图4,当海绵和金属绑带碎块运动至磁辊63端时,由于磁辊63具有磁性,因此在磁辊63的作用下,海绵能够直接从传送带64上掉落,而堆积在底层海绵中的金属绑带碎块与海绵分离,金属绑带碎块转过磁辊63并继续跟随传送带64运动一段距离。
48.参照图3和图4,传送带64上沿其运动方向粘接有若干个限位凸条9,限位凸条9平行于传送带64的宽度方向,当金属绑带碎块转过磁辊63并沿着远离磁辊63的方向运动时,金属绑带碎块会被反向吸附至传送带64相对磁辊63底部的位置。限位凸条9能够带动金属绑带碎块远离磁辊63,从而确保金属绑带碎块能够落料。
49.参照图3和图4,传送带64宽度方向的两侧分别设置有限位组件,限位组件包括若干个沿传送带64运动方向设置的限位片11,限位片11呈“s”型设置,若干个限位片11依次首尾紧贴,限位片11的底端粘接在传送带64上,限位片11的设置对传送带64上的海绵和金属绑带碎块起限位作用,减小了海绵和金属绑带碎块掉出传送带64的可能性。
50.参照图3和图4,支撑架61相对磁辊63下方的位置设置有导料件,导料件包括一体设置的第一滑道101和第二滑道102,第二滑道102竖向设置且顶端固定连接于第一滑道101的底端,第一滑道101远离第二滑道102的一端位于磁辊63的正下方且栓接在支撑架61上,第一滑道101沿着磁辊63至传动辊62的方向朝向下倾斜。
51.参照图3和图4,当金属绑带碎块逐渐远离磁辊63的过程中,金属绑带碎块失去磁辊63的吸附作用,然后掉落至第一滑道101内,并顺着第一滑道101和第二滑道102实现出料。以此通过皮带磁选机8和磁辊63对海绵中的金属绑带碎块实现分层分选,从而提高了对海绵和金属绑带碎块的分选效果。
52.参照图3和图4,第一滑道101朝向传送带64的一侧开口,以此增长了第一滑道101
上进料口在传送带64上的投影,确保金属绑带碎块在失去磁辊63的吸附作用后,能够掉落至第一滑道101内。
53.参照图1,第四输送带5后还设置有第五输送带19,第五输送带19和第四输送带5的结构相同,导料件在第五输送带19上还设置有一个。因此通过第五输送带19对底层海绵中的金属绑带碎块实现二次分选,进一步提高海绵和金属绑带碎块的分选效果。
54.参照图1,电连接于控制系统的光电传感器18位于第一输送带1、第二输送带3、第三输送带4、第四输送带5、第五输送带19上均栓接有一个,皮带磁选机8电连接于控制系统。当第一输送带1、第二输送带3、第三输送带4、第四输送带5、第五输送带19任意一个发生损坏时,其对应的光电传感器18能够通过控制系统关闭位于之前的输送带,而位于其后面的输送带能够继续工作。
55.本技术实施例一种海绵包块破碎回收线的实施原理为:海绵包块由第一输送带1输送至双轴破碎机2内破碎,破碎后的海绵和金属绑带碎块通过第二输送带3输送至第三输送带4上。启动电机65,电机65的输出轴带动磁辊63转动,磁辊63通过传送带64带动传动辊62转动,传送带64上的海绵和金属绑带碎块沿着传动辊62至磁辊63的方向运动,此过程中,支撑架61上的皮带磁选机8能够对表面海绵中的金属绑带碎块进行吸附。当海绵运动至磁辊63处时,海绵直接从传送带64上掉落,而底层海绵中的金属绑带碎块在磁辊63的吸附作用下,转过磁辊63并逐渐远离磁辊63,当金属绑带碎块距离磁辊63足够远时,金属绑带碎块自动掉落至第一滑道101上,然后顺着第一滑道101和第二滑道102实现落料。第四输送带5和位于其上方的皮带磁选机8对海绵和金属绑带碎块进行二次分选,第五输送带19对海绵和金属绑带碎块实现第三次分选,确保海绵和金属绑带碎块能够充分分离。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。