1.本发明涉及橡胶件加工技术领域,更具体的说是一种合成橡胶件及其加工方法。
背景技术:
2.合成橡胶,又称为合成弹性体,是由人工合成的高弹性聚合物,是三大合成材料之一。其产量仅低于合成树脂(或塑料)、合成纤维;而以合成橡胶为原料普通的用来保护板材、玻璃以及片状物的边缘的橡胶套,需要根据板材、玻璃以及片状物的边缘的厚度进行橡胶套的挑选,而且因为其质地太软,橡胶的弹性太大,很容易导致橡胶套套在板材、玻璃以及片状物的边上之后从板材、玻璃以及片状物的边缘掉落的风险,所以普通的橡胶套与其他物体的连接强度太低。
技术实现要素:
3.为克服现有技术的不足,本发明提供一种合成橡胶件及其加工方法,可以增强合成橡胶件与其他物体的连接强度。
4.本发明解决其技术问题所采用的技术方案是:
5.一种合成橡胶件加工方法,该方法包括以下步骤:
6.步骤一:首先使用铝合金制作出内部骨架;
7.步骤二:将骨架放置到模具当中并进行定位和固定;
8.步骤三:将熔融状态的橡胶熔液倒入模具使橡胶成型;
9.步骤四:冷却之后得到合成橡胶件;
10.所述合成橡胶件加工方法还使用一种合成橡胶件加工装置,所述合成橡胶件由直骨和外层组成,所述装置能够将外层包裹在直骨上,所述直骨为上述的骨架。
11.进一步的所述装置包括外壳、内腔和底板,外壳两个,每个外壳中均设置有内腔,两个内腔能够在底板上组合为一个成型腔。
12.进一步的所述底板上设置有球头柱和卡槽,球头柱和卡槽均位于两个内腔中间。
13.进一步的所述直骨上设置有多个侧骨。
14.进一步的所述外层的上下两侧分别设置有连接球和连接孔,连接球和连接孔能够互相套合。
15.本发明一种合成橡胶件加工方法的有益效果为:
16.本发明中因为直骨上设置有多个侧骨,所以在合成橡胶件成型之后,便可以根据板材、玻璃以及片状物的边缘的厚度来改变侧骨的间距和形状,从而使合成橡胶件能够包裹在不同厚度的板材、玻璃以及片状物的边缘,并且能够利用铝合金材质的直骨和侧骨,来对橡胶材质的外层的形状进行限制和定型,使两排侧骨将板材、玻璃以及片状物的边缘紧紧的夹在中间,从而使合成橡胶件能够紧紧的包裹在不同厚度的板材、玻璃以及片状物的边缘,从而增强了合成橡胶件与板材、玻璃以及片状物的边缘的连接强度,并且避免了因为板材、玻璃以及片状物的边缘过大导致其掉落的情况。
附图说明
17.下面结合附图和具体实施方法对本发明做进一步详细的说明。
18.图1为本发明中的合成橡胶件加工方法的步骤流程图;
19.图2为本发明中外壳和内腔的结构示意图;
20.图3为本发明中组成成型腔的结构示意图;
21.图4为本发明中球头柱和卡槽的结构示意图;
22.图5为本发明中横梁和夹板的结构示意图;
23.图6为本发明中夹紧臂和转臂的结构示意图;
24.图7为本发明中畸形梁和裁切刀的结构示意图;
25.图8为本发明中立柱和横梁的结构示意图;
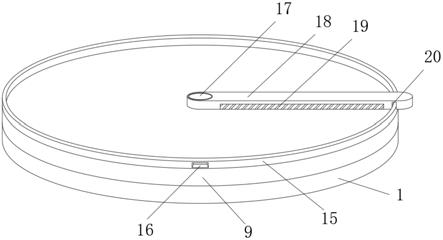
26.图9为本发明中加工装置的结构示意图;
27.图10为本发明中合成橡胶件的结构示意图;
28.图11为本发明中合成橡胶件的剖面示意图;
29.图12为本发明中直骨和侧骨的结构示意图。
30.图中:外壳101;内腔102;底板103;球头柱104;卡槽105;夹紧臂106;丝杠107;横梁201;转臂202;侧臂203;夹板204;立柱301;丝杆302;螺纹套303;畸形梁304;裁切刀305;外层a;连接球a
‑
1;连接孔a
‑
2;直骨b;侧骨b
‑
1。
具体实施方式
31.参看图1和图10,根据图中所示可以得到合成橡胶件成型的一个示例性工作过程是:
32.步骤一:首先使用铝合金制作出内部骨架;步骤二:将骨架放置到模具当中并进行定位和固定;步骤三:将熔融状态的橡胶熔液倒入模具使橡胶成型;步骤四:冷却之后得到合成橡胶件;所述合成橡胶件加工方法还使用一种合成橡胶件加工装置,所述合成橡胶件由直骨b和外层a组成,所述装置能够将外层a包裹在直骨b上,所述直骨b为上述的骨架;按照上述方法步骤,首先需要将直骨b进行制作和固定,随后将直骨b放置到模具当中,在将橡胶原料加热,使橡胶原料融化,再将熔融状态下的橡胶熔液倒入到模具当中,使橡胶熔液将直骨b淹没,并且包裹在其中,使橡胶原来与直骨b粘连在一起,待冷却之后,便可以得到合成橡胶件,因为直骨b是由铝合金材质制造的,所以可以进行形变,得到合成橡胶件能够根据直骨b的形变调整为需要的形状,从而将合成橡胶件包裹在任何板材、玻璃以及片状物的边缘上,将板材、玻璃以及片状物的边缘包裹住形成保护,避免玻璃的边缘被磕碰损坏,同时能够避免板材以及片状物的边缘出现被刮花或者破裂。
33.参看图2和图3,根据图中所示可以得到组合形成模具的一个示例性工作过程是:
34.本发明中需要使用模具来使熔融状态下的橡胶熔液进行浇注和成型,所以外壳101设置有两个,每个外壳101中均设置有内腔102,只需要将两个外壳101扣合在一起,使两个内腔102形成一个完整的成型腔,从而实现将熔融状态下的橡胶熔液倒入到成型腔当中用来制作外层a,同样的只需要在倒入熔融状态下的橡胶熔液之前将直骨b放置到成型腔的中间,便可以完成合成橡胶件的制作;但是普通的人工操作来使两个外壳101扣合的过程比较麻烦,并且精度差,容易导致两个内腔102发生错位。
35.参看图3和图9,根据图中所示可以得到自动组合模具的一个示例性工作过程是:
36.为了避免人工操作导致两个内腔102发生错位,本发明中还设置有夹紧臂106和丝杠107,两个丝杠107均转动在底板103上,两个夹紧臂106分别螺纹连接在两个丝杠107上,两个丝杠107的中部相互固定在一起,两个丝杠107的螺纹方向相反,两个外壳101分别固定在两个夹紧臂106上,此时便可以通过外部的动力源,例如减速电机带动两个丝杠107同时转动,便可以使两个夹紧臂106在底板103上滑动,相互靠近或者远离,在相互靠近时便可以实现两个外壳101的自动扣合,并且能够利用两个丝杠107处于同一条轴线上的特点,使两个外壳101相互扣合时的精度保持准确,从而避免人工操作导致两个内腔102发生错位。
37.参看图3和图4,根据图中所示可以得到对直骨b进行定位固定的一个示例性工作过程是:
38.将直骨b放置到成型腔的中间之后,需要将直骨b进行固定,避免直骨b在成型腔中发生位置偏移、倾斜或者晃动,此时底板103上设置有球头柱104和卡槽105,球头柱104和卡槽105均位于两个内腔102中间,只需要将直骨b的一端对准卡槽105,然后将其塞进卡槽105当中,便可以使直骨b被垂直固定在底板103上,使直骨b能够直立在成型腔的中间并且保持不动,不需要其他方式来进行扶持,也不需要其他装置来将其扶住;然后随着两个外壳101在底板103上滑动扣合在一起之后,直骨b便位于成型腔的中间,同时底板103将成型槽的下方封堵住,便可以进行熔融状态下的橡胶熔液的浇注。
39.参看图7和图9,根据图中所示可以得到清理合成橡胶件毛边的一个示例性工作过程是:
40.在两个外壳101扣合组合出一个成型腔之后,两个外壳101之间接触的地方使存在细小的缝隙的,那么在橡胶熔液进入到成型腔中之后,会有一部分钻入到缝隙当中,从而会导致外层a上出现一条细小的棱型毛边,在使用的过程中棱型毛边会影响使用体验和效果,本发明中还包括立柱301、丝杆302、螺纹套303、畸形梁304和裁切刀305,丝杆302转动在立柱301上,螺纹套303设置在丝杆302上,畸形梁304固定在螺纹套303上,裁切刀305设置有两个,其中一个裁切刀305固定在螺纹套303上,另外一个裁切刀305滑动在畸形梁304上;会在外层a成型之后,使用减速电机带动丝杆302转动,使丝杆302带动螺纹套303在立柱301上进行滑动,并且带动畸形梁304和两个裁切刀305相对于底板103进行垂直方向上的运动,在两个裁切刀305下降的时候,会将外层a上的两条棱型毛边进行切除,从而使外层a的表面保持平整和光滑;
41.那么对应的在外层a成型之后,两个外壳101相互远离打开,将外层a露出来,此时便可以利用气缸带动畸形梁304上的裁切刀305移动,从而使畸形梁304上的裁切刀305靠近外层a内部的棱型毛边,并且到达需要裁切的位置,而使用另外的气缸带动立柱301靠近外层a外侧的棱型毛边,使螺纹套303上的裁切刀305靠近外层a外侧的棱型毛边,然后螺纹套303下降,便可以同时使两个裁切刀305将外层a上的两条棱型毛边切除掉;
42.但是在两个外壳101相互远离打开将外层a露出来之后,在外层a上的两条棱型毛边切除之前,需要将外层a扶住,避免受到两个裁切刀305的向下的裁切力使外层a倾倒或者歪斜。
43.参看图5和图9,根据图中所示可以得到避免外层a倾倒或者歪斜的一个示例性工作过程是:
44.为了解决向下的裁切力使外层a倾倒或者歪斜的问题,本发明中还包括横梁201、侧臂203和夹板204,横梁201滑动在底板103上,横梁201上设置有两个侧臂203,每个侧臂203上均滑动有一个夹板204,具体操作为:在两个外壳101相互远离打开将外层a露出来之后,利用外部动力带动横梁201向着外层a移动,横梁201会带动两个侧臂203移动到外层a的左右两侧,也就是没有棱型毛边的两侧,随后在使用气缸带动两个夹板204在两个侧臂203上移动,使两个夹板204将外层a从左右两侧夹持住,从而避免了外层a倾倒或者歪斜的问题,同时畸形梁304的形状绕开了侧臂203,不会出现干涉的情况,能够保证两个裁切刀305裁切到底。
45.参看图6和图8,根据图中所示可以得到自动夹持外层a的一个示例性工作过程是:
46.本发明中两个转臂202均转动在底板103上,两个转臂202分别滑动在横梁201的前后两侧,在减速电机带动丝杠107转动并且使两个夹紧臂106相互远离打开的时候,两个夹紧臂106将外层a露在外界之后,会分别触碰到两个转臂202,随着两个夹紧臂106的继续移动,两个转臂202在底板103上转动,从而带动横梁201向着外层a靠近,从而实现了横梁201自动靠近外层a,随后对外层a进行夹紧的过程,不需要再利用单独的气缸来带动横梁201进行移动,并且横梁201与底板103之间固定连接有弹簧,所以在两个夹紧臂106不触碰两个转臂202之后,横梁201会缩回到原位,从而避免干涉两个夹紧臂106靠近去组成成型腔;
47.并且可以将立柱301固定在横梁201上,从而使横梁201移动时可以自动带动立柱301靠近外层a,使螺纹套303上的裁切刀305靠近外层a外侧的棱型毛边。
48.参看图10和图12,根据图中所示可以得到能够增加合成橡胶件连接强度的一个示例性工作过程是:
49.普通的用来保护板材、玻璃以及片状物的边缘的橡胶套,因为其质地太软,橡胶的弹性太大会导致橡胶套从板材、玻璃以及片状物的边缘掉落的风险,并且还需要根据板材、玻璃以及片状物的边缘的厚度进行橡胶套的挑选;而本发明中因为直骨b上设置有多个侧骨b
‑
1,所以在合成橡胶件成型之后,便可以根据板材、玻璃以及片状物的边缘的厚度来改变侧骨b
‑
1的间距和形状,从而使合成橡胶件能够包裹在不同厚度的板材、玻璃以及片状物的边缘,并且能够利用铝合金材质的直骨b和侧骨b
‑
1,来对橡胶材质的外层a的形状进行限制和定型,使两排侧骨b
‑
1将板材、玻璃以及片状物的边缘紧紧的夹在中间,从而使合成橡胶件能够紧紧的包裹在不同厚度的板材、玻璃以及片状物的边缘,从而增强了合成橡胶件与板材、玻璃以及片状物的边缘的连接强度,并且避免了因为板材、玻璃以及片状物的边缘过大导致其掉落的情况。
50.参看图10和图11,根据图中所示可以得到延长合成橡胶件的一个示例性工作过程是:
51.所述外层a的上下两侧分别设置有连接球a
‑
1和连接孔a
‑
2,连接球a
‑
1和连接孔a
‑
2能够互相套合;合成橡胶件的长度是有限的,但是可以通过两个合成橡胶件上的连接球a
‑
1和连接孔a
‑
2,来进行相对应的连接,将其中一个合成橡胶件上的连接球a
‑
1塞进另外一个合成橡胶件上的连接孔a
‑
2当中,从而将两个合成橡胶件连接在一起,从而延长合成橡胶件的长度,能够根据板材、玻璃以及片状物的边缘的长度进行延长;还可以在不使用时,拉动连接球a
‑
1来快速取下合成橡胶件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。