1.本发明涉及具备致动器的电动悬架装置,该致动器设在车辆的车身与车轮之间,产生用于使车身的振动衰减的负荷。
背景技术:
2.以往,已知一种具备致动器的电动悬架装置,该致动器设在车辆的车身与车轮之间,产生用于使车身的振动衰减的负荷(参照专利文献1)。
3.专利文献1所涉及的电动悬架装置具有对被设定为包含前轮的共振周期的时间的规定范围内的值的基准时间进行存储的控制装置。控制装置以如下方式动作:在基于预览传感器(preview sensor)的检测结果判定为在前轮的前方存在规定的上下位移部位时,在直至前轮到达规定的上下位移部位的时刻为止将吸震器的衰减系数设定为最小值,在从上述时刻经过了基于基准时间的规定经过时间时,将衰减系数的控制返回到遵照规定的控制律的控制。
4.根据专利文献1所涉及的电动悬架装置,不检测车身与车轮之间的相对速度等车身振动状况,能够降低前轮通过规定的上下位移部位时产生的向车身的冲击且有效地使车身的振动衰减。
5.专利文献1:日本特开2017
‑
171156号公报
技术实现要素:
6.但是,在专利文献1的电动悬架装置中,不检测车身与车轮之间的相对速度等车身振动状况,基于由摄像头等预览传感器得到的路面状态的检测结果来进行使车身的振动衰减的控制。因此,假设在路面状态的检测结果包含错误的情况下,不仅无法使车身的振动衰减,反而有增大车身的振动的隐患。其结果为,有与期待相反导致车辆的乘坐感受恶化的隐患。
7.本发明是鉴于上述实际情况而做出的,其目的在于提供一种即使路面状态的检测结果包含错误也能够将车辆的乘坐感受维持为舒适的电动悬架装置。
8.为了实现上述目的,本发明(1)所涉及的电动悬架装置为具备设于车辆的车身与车轮之间且产生用于使该车身的振动衰减的负荷的致动器的电动悬架装置,其最主要特征在于,具备:路面状态检测部,其检测涉及到该车辆的前方路面的前方路面状态;簧上状态量检测部,其检测该车辆的簧上所涉及的簧上状态量;目标负荷运算部,其基于上述前方路面状态及上述簧上状态量对目标负荷进行运算;和负荷控制部,其使用作为上述目标负荷运算部的运算结果的目标负荷进行上述致动器的负荷控制,上述目标负荷运算部即使在作为基于由上述路面状态检测部检测出的上述前方路面状态得到的检测结果而得出上述前方路面没有凹凸这一主旨的情况下,在基于由上述簧上状态量检测部检测出的上述簧上状态量得到的检测结果中得出该前方路面存在凹凸这一主旨时,基于该簧上状态量进行上述目标负荷的运算。
9.发明效果
10.根据本发明(1)所涉及的电动悬架装置,即使路面状态的检测结果包含错误,也能够将车辆的乘坐感受维持为舒适。
附图说明
11.图1是本发明的实施方式所涉及的电动悬架装置的整体结构图。
12.图2是本发明的实施方式所涉及的电动悬架装置所具备的电磁致动器的局部剖视图。
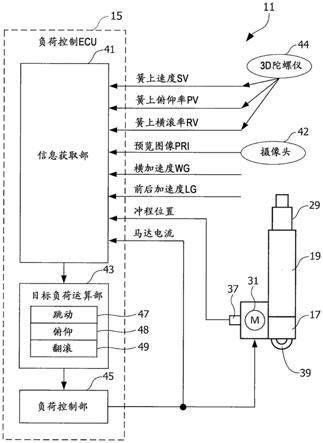
13.图3是本发明的实施方式所涉及的电动悬架装置所具备的负荷控制ecu的内部及周边部的结构图。
14.图4是概念性地表示本发明的实施方式所涉及的电动悬架装置所具备的负荷控制ecu的内部结构的图。
15.图5a是供说明本发明的实施方式所涉及的电动悬架装置的动作的流程图。
16.图5b是供说明图5a所示的路面判定处理的动作的流程图。
17.图5c是供说明图5a所示的路面判定处理的动作的流程图。
18.图5d是供说明图5a所示的切换判定处理的动作的流程图。
19.图6是供说明本发明的实施方式所涉及的电动悬架装置的动作的时间图。
20.附图标记说明
21.10
ꢀꢀ
车辆
22.11
ꢀꢀ
电动悬架装置
23.13
ꢀꢀ
电磁致动器(致动器)
24.41
ꢀꢀ
信息获取部
25.43
ꢀꢀ
目标负荷运算部
26.45
ꢀꢀ
负荷控制部
27.pri 预览图像
28.sv
ꢀꢀ
簧上速度
29.wg
ꢀꢀ
横加速度
30.lg
ꢀꢀ
前后加速度
具体实施方式
31.以下,参照适当附图详细对本发明的实施方式所涉及的电动悬架装置11进行说明。
32.此外,在以下所示的附图中,对具有共同功能的部件标注共同的附图标记。该情况下,原则上省略重复的说明。另外,对于部件的尺寸及形状,存在为了便于说明而变形或夸张地示意性表示的情况。
33.〔本发明的实施方式所涉及的电动悬架装置11中共同的基本结构〕
34.首先,参照图1、图2对本发明的实施方式所涉及的电动悬架装置11中共同的基本结构进行说明。
35.图1是本发明的实施方式所涉及的电动悬架装置11中共同的整体结构图。图2是构
成电动悬架装置11的一部分的电磁致动器13的局部剖视图。
36.本发明的实施方式所涉及的电动悬架装置11如图1所示,构成为具备按车辆10的各车轮设置的多个电磁致动器13、和负荷控制ecu15。多个电磁致动器13与负荷控制ecu15之间分别经由用于供给从负荷控制ecu15向多个电磁致动器13的负荷控制电力的电力供给线14(参照图1的实线)、以及用于从多个电磁致动器13向负荷控制ecu15传输电动马达31(参照图2)的负荷控制信号的信号线16(参照图1的虚线)而相互连接。
37.在本实施方式中,电磁致动器13按包含前轮(左前轮、右前轮)及后轮(左后轮、右后轮)的各车轮,总计配置有四个。按各车轮配置的电磁致动器13与各车轮的伸缩动作相应地相互独立地被负荷控制。
38.在本发明的实施方式中,多个电磁致动器13各自只要没有特别说明,则分别具有共同的结构。因此,通过对一个电磁致动器13的结构进行说明,而取代对多个电磁致动器13的说明。
39.电磁致动器13如图2所示,构成为具备基壳17、外管19、球轴承21、滚珠丝杠轴23、多个滚珠25、螺母27及内管29。
40.基壳17经由球轴承21而绕轴旋转自如地支承滚珠丝杠轴23的基端侧。外管19设于基壳17,收纳包含滚珠丝杠轴23、多个滚珠25、螺母27在内的滚珠丝杠机构18。多个滚珠25沿着滚珠丝杠轴23的丝杠槽滚动。螺母27经由多个滚珠25与滚珠丝杠轴23卡合,将滚珠丝杠轴23的旋转运动转换成直线运动。与螺母27连结的内管29与螺母27成为一体且沿着外管19的轴向位移。
41.为了对滚珠丝杠轴23传递旋转驱动力,如图2所示,在电磁致动器13中,具备电动马达31、一对带轮33及带部件35。电动马达31以与外管19并列的方式设于基壳17。在电动马达31的马达轴31a及滚珠丝杠轴23上,分别安装有带轮33。在这一对带轮33上悬架有用于将电动马达31的旋转驱动力传递到滚珠丝杠轴23的带部件35。
42.在电动马达31上设有检测电动马达31的旋转角信号的旋转变压器(resolver)37。由旋转变压器37检测出的电动马达31的旋转角信号经由信号线16被发送到负荷控制ecu15。电动马达31根据负荷控制ecu15经由电力供给线14向多个电磁致动器13各自供给的负荷控制电力而被旋转驱动。
43.此外,在本实施方式中,如图2所示,通过采用将电动马达31的马达轴31a与滚珠丝杠轴23大致平行地配置并将两者之间连结的布局,缩短了电磁致动器13中的轴向的尺寸。但是,也可以采用将电动马达31的马达轴31a和滚珠丝杠轴23同轴地配置并将两者之间连结的布局。
44.在本发明的实施方式所涉及的电磁致动器13中,如图2所示,在基壳17的下端部设有连结部39。该连结部39连结固定于未图示的簧下部件(车轮侧的下臂、转向节等)。另一方面,内管29的上端部29a连结固定于未图示的簧上部件(车身侧的支柱塔部等)。
45.总之,电磁致动器13与在车辆10的车身与车轮之间设置的未图示的弹簧部件并列设置。
46.上述那样构成的电磁致动器13如以下那样进行动作。即,例如,考虑从车辆10的车轮侧对连结部39输入有涉及到向上振动的推动力的情形。在该情形下,相对于被施加了涉及到向上振动的推动力的外管19,内管29及螺母27将要一体地下降。受此影响,滚珠丝杠轴
23将要向遵照螺母27的下降的朝向旋转。此时,产生妨碍螺母27下降的朝向的电动马达31的旋转驱动力。该电动马达31的旋转驱动力经由带部件35而传递到滚珠丝杠轴23。
47.像这样,通过使抵抗涉及到向上振动的推动力的反作用力(衰减力)作用于滚珠丝杠轴23,而使要从车轮侧向车身侧传递的振动衰减。
48.〔负荷控制ecu15的内部结构〕
49.接下来,参照图3来说明本发明的实施方式所涉及的电动悬架装置11所具备的负荷控制ecu15的内部及周边部的结构。
50.图3是本发明的实施方式所涉及的电动悬架装置11所具备的负荷控制ecu15的内部及周边部的结构图。
51.〔本发明的实施方式所涉及的电动悬架装置11〕
52.本发明的实施方式所涉及的电动悬架装置11所具备的负荷控制ecu15构成为包含进行各种运算处理的微型计算机。负荷控制ecu15具有负荷控制功能,在该负荷控制功能中,基于由旋转变压器37检测出的电动马达31的旋转角信号和目标负荷等,进行多个各电磁致动器13的负荷控制,由此产生涉及到电磁致动器13的衰减动作及伸缩动作所涉及的负荷。
53.为了实现这样的负荷控制功能,如图3所示,负荷控制ecu15构成为具备信息获取部41、目标负荷运算部43及负荷控制部45。
54.如图3所示,信息获取部41将由旋转变压器37检测出的电动马达31的旋转角信号获取为涉及到冲程位置的时序信息,并且通过对涉及到冲程位置的时序信息以时间进行微分而获取簧上速度sv的信息。此外,簧上速度sv是簧上(车身)的上下方向的速度。
55.另外,如图3所示,信息获取部41关于簧上俯仰率pv、簧上翻滚率rv、簧上加速度sa,分别获取各自的时序信息。簧上俯仰率pv及簧上翻滚率rv的信息例如如图3所示,只要基于设于车辆10的3d陀螺仪传感器44的信息获取即可。
56.此外,可以如图3所示,基于3d陀螺仪传感器44的信息来获取簧上速度sv的信息。
57.另外,信息获取部41将车辆10的行进方向的前方路面所涉及的前方路面状态的时序信息获取为预览图像信息pri。预览图像信息pri例如基于由设于车辆10的摄像头42拍摄到的图像信息获取即可。
58.摄像头42具有向本车辆前方的斜下方倾斜的光轴,具有对本车辆10的行进方向图像进行拍摄的功能。作为摄像头42,例如,能够适当使用cmos(complementary metal oxide semiconductor)摄像头或ccd(charge coupled device)摄像头等。摄像头42设于本车辆10的车室内的后视镜附近等。
59.由摄像头42拍摄到的涉及到本车辆10的前方路面的预览图像信息pri经由通信介质向负荷控制ecu15的信息获取部41发送。
60.而且,如图3所示,信息获取部41关于横加速度wg、前后加速度lg、电磁致动器13的冲程位置、涉及到电动马达31的马达电流,分别获取各自的时序信息。横加速度wg、前后加速度lg的信息只要由横加速度传感器、前后加速度传感器(均未图示)分别获取即可。
61.由信息获取部41获取到的簧上速度sv、簧上俯仰率pv、簧上翻滚率rv、预览图像pri、横加速度wg、前后加速度lg、电磁致动器13的冲程位置、涉及到电动马达31的马达电流的信息分别被发送到目标负荷运算部43。
62.目标负荷运算部43如图3所示,具有基于由信息获取部41获取到的上述各种信息通过运算求出作为涉及到电磁致动器13的衰减动作及伸缩动作的目标值的目标负荷的功能。
63.另外,目标负荷运算部43具有基于由摄像头42得到的预览图像信息pri进行目标负荷的运算的功能、和基于由3d陀螺仪传感器44得到的簧上速度sv进行目标负荷的运算的功能。对此,详情将后述。
64.此外,目标负荷运算部43如图3所示,具备跳动目标值运算部47、俯仰目标值运算部48及翻滚目标值运算部49。
65.跳动目标值运算部47基于簧上速度sv的信息对车辆10的跳动姿势控制用的跳动目标值进行运算。俯仰目标值运算部48基于簧上俯仰率pv对车辆10的俯仰姿势控制用的俯仰目标值进行运算。翻滚目标值运算部49基于簧上翻滚率rv对车辆10的翻滚姿势控制用的翻滚目标值进行运算。
66.负荷控制部45计算出能够实现由目标负荷运算部43求出的目标负荷的目标电流值。接着,负荷控制部4进行多个各电磁致动器13各自所具备的电动马达31的驱动控制,以使得涉及到电动马达31的马达电流追随上述计算出的目标电流值。多个各电磁致动器13分别独立地进行各个电动马达31的负荷控制。
67.负荷控制部45具有在进行电磁致动器13的负荷控制时使用的多种负荷控制模式。作为多种负荷控制模式,例如,准备了在车辆10的前方路面状态属于“平稳”的情形下使用的平稳负荷控制模式、在车辆10的前方路面状态属于“轻震”的情形下使用的轻震负荷控制模式、在车辆10的前方路面状态属于“突震”的情形下使用的突震负荷控制模式。
68.在上述平稳负荷控制模式中,在车辆10的前方路面状态属于“平稳”的情形下,适当设定适合消除“平稳”车身振动的控制参数。
69.在上述轻震负荷控制模式中,在车辆10的前方路面状态属于“轻震”的情形下,适当设定适合消除“轻震”车身振动的控制参数。
70.在上述突震负荷控制模式中,在车辆10的前方路面状态属于“突震”的情形下,适当设定适合消除“突震”车身振动的控制参数。
71.而且,负荷控制部45具备使用基于由摄像头42得到的预览图像信息pri求出的运算结果即目标负荷进行负荷控制的预览负荷控制模式、和使用基于由3d陀螺仪传感器44得到的簧上速度sv求出的运算结果即目标负荷进行负荷控制的反馈负荷控制模式。
72.在上述预览负荷控制模式中,在使用基于预览图像信息pri求出的运算结果即目标负荷进行负荷控制的情形下,适当设定适合消除车身振动的控制参数。
73.同样地,在上述反馈负荷控制模式中,在使用基于簧上速度sv求出的运算结果即目标负荷进行负荷控制的情形下,适当设定适合消除车身振动的控制参数。
74.上述预览负荷控制模式与上述反馈负荷控制模式相比在控制的响应性方面优异。这是基于在上述反馈负荷控制模式中根据由3d陀螺仪传感器44得到的簧上速度sv来运算目标负荷,与之相对在上述预览负荷控制模式中根据由摄像头42得到的前方路面的预览图像信息pri来运算目标负荷。因此,上述预览负荷控制模式与上述反馈负荷控制模式相比,能够先(时间上早)获取目标负荷等。
75.〔电动悬架装置11所具备的负荷控制ecu15的主要部分结构〕
76.接下来,适当参照图4对本发明的实施方式所涉及的电动悬架装置11所具备的负荷控制ecu15的内部结构进行说明。
77.图4是概念性地表示本发明的实施方式所涉及的电动悬架装置11所具备的负荷控制ecu15的内部结构的图。
78.电动悬架装置11所具备的负荷控制ecu15具有路面数据生成部51、滤波处理部53、路面判定部55、切换判定部59及上述负荷控制部45。路面数据生成部51、滤波处理部53相当于信息获取部41。路面判定部55、切换判定部59相当于目标负荷运算部43。
79.路面数据生成部51基于预览图像pri的时序信息,生成包含车辆10的前方路面状态是否平坦、是否有凹凸、是否无阶梯的路面数据。另外,路面数据生成部51基于簧上速度sv、横加速度wg、前后加速度lg的时序信息,生成包含车辆10的前方路面状态是否平坦、是否有凹凸、是否无阶梯的路面数据。
80.由路面数据生成部51的生成的涉及到路面数据的时序信息被发送到后级的滤波处理部53。
81.为了判别车辆10的前方路面是否为不平整路面,滤波处理部53从由路面数据生成部51生成的涉及到路面数据的时序信息中,提取涉及到规定频率的路面数据。
82.属于由滤波处理部53提取出的规定频带的路面数据被发送到后级的路面判定部55。
83.详细地说,滤波处理部53构成为具备提取涉及到“平稳振幅”的信号的平稳振幅信号提取部53a、提取涉及到“轻震振幅”的信号的轻震振幅信号提取部53b、和提取涉及到“突震振幅”的信号的突震振幅信号提取部53c。
84.平稳振幅信号提取部53a进行从涉及到路面数据的时序信息提取属于第1频带(没有特别限定,例如为0.1~2hz左右)的“平稳振幅”信号成分的lpf(低通滤波)处理。通过平稳振幅信号提取部53a的lpf处理,提取出属于低于簧上共振频率的第1频带的“平稳振幅”信号成分。
85.此外,在平稳振幅信号提取部53a中记载的伯德图中,横轴为频率,纵轴为振幅(以下相同)。
86.轻震振幅信号提取部53b进行从涉及到路面数据的时序信息提取属于第2频带(没有特别限定,例如为3~8hz左右)的“轻震振幅”信号成分的bpf(带通滤波)处理。通过轻震振幅信号提取部53b的bpf处理,提取出乘员会敏感地感受到的属于第2频带的“轻震振幅”信号成分。
87.突震振幅信号提取部53c进行从涉及到路面数据的时序信息提取属于第3频带(没有特别限定,例如为4hz左右)的“突震振幅”信号成分的hpf(高通滤波)处理。通过突震振幅信号提取部53c的hpf处理,提取出在从铺装路的接缝、裂缝、突起或阶梯通过时车身产生的属于第3频带的“突震振幅”信号成分。
88.路面判定部55基于由滤波处理部53分为“平稳振幅”、“轻震振幅”、“突震振幅”这三种频带的涉及到路面数据的信号成分的时序信息,判定车辆10的前方路面状态是否属于“平稳”、“轻震”、“突震”。
89.详细地说,路面判定部55构成为具备判定车辆10的前方路面状态是否属于“平稳”的平稳判定部55a、是否属于“轻震”的轻震判定部55b、和是否属于“突震”的突震判定部
55c。
90.平稳判定部55a基于由平稳振幅信号提取部53a提取出的属于第1频带的“平稳振幅”信号成分,判定车辆10的前方路面状态是否属于“平稳”。具体地说,平稳判定部55a基于“平稳振幅”信号成分的大小是否超过第1阈值来进行平稳判定。平稳判定部55a在“平稳振幅”信号成分的大小超过第1阈值的情况下,发出车辆10的前方路面状态属于“平稳”这一主旨的判定。
91.轻震判定部55b基于由轻震振幅信号提取部53b提取出的属于第2频带的“轻震振幅”信号成分,判定车辆10的前方路面状态是否属于“轻震”。具体地说,轻震判定部55b基于“轻震振幅”信号成分的大小是否超过第2阈值来进行轻震判定。轻震判定部55b在“轻震振幅”信号成分的大小超过第2阈值的情况下,发出车辆10的前方路面状态属于“轻震”这一主旨的判定。
92.突震判定部55c基于由突震振幅信号提取部53c提取出的属于第3频带的“突震振幅”信号成分,判定车辆10的前方路面状态是否属于“突震”。具体地说,突震判定部55c基于“突震振幅”信号成分的大小是否超过第3阈值来进行突震判定。突震判定部55c在“突震振幅”信号成分的大小超过第3阈值的情况下,发出车辆10的前方路面状态属于“突震”这一主旨的判定。
93.基于路面判定部55得到的判定结果被发送到后级的路面标志设定部57。
94.路面标志设定部57基于由属于路面判定部55的平稳判定部55a、轻震判定部55b、突震判定部55c得到的判定结果来设定路面标志。
95.详细地说,路面标志设定部57在由平稳判定部55a发出了车辆10的前方路面状态属于“平稳”这一主旨的判定的情况下,设定“平稳”路面标志。
96.另外,路面标志设定部57在由轻震判定部55b发出了车辆10的前方路面状态属于“轻震”这一主旨的判定的情况下,设定“轻震”路面标志。
97.并且,路面标志设定部57在由突震判定部55c发出了车辆10的前方路面状态属于“突震”这一主旨的判定的情况下,设定“突震”路面标志。
98.由路面标志设定部57设定的路面标志被发送到后级的切换判定部59。
99.切换判定部59基于由路面标志设定部57设定的路面标志的设定内容,判定可否切换进行电磁致动器13的负荷控制时使用的负荷控制模式。
100.详细地说,切换判定部59在由路面标志设定部57设定了“平稳”路面标志、“轻震”路面标志、“突震”路面标志中的一个或多个路面标志的情况下,判定可否向遵照所设定的路面标志的类别的负荷控制模式切换。为便于说明,存在将这样的遵照路面标志的设定内容的切换可否判定称为第1切换判定的情况。
101.具体地说,例如,在由路面标志设定部57设定了“平稳”路面标志的情况下,切换判定部59发出可将当前负荷控制模式向遵照“平稳”路面标志的上述平稳负荷控制模式切换这一主旨的判定。
102.另外,在由路面标志设定部57设定了“轻震”路面标志的情况下,切换判定部59判定可将当前负荷控制模式向遵照“轻震”路面标志的上述轻震负荷控制模式切换这一主旨的判定。
103.而且,在由路面标志设定部57设定了“突震”路面标志的情况下,切换判定部59发
出可以将当前负荷控制模式向遵照“突震”路面标志的上述突震负荷控制模式切换这一主旨的判定。
104.另外,切换判定部59基于由信息获取部41获取到的簧上速度sv、横加速度wg、前后加速度lg,判定可否切换进行电磁致动器13的负荷控制时使用的负荷控制模式。
105.详细地说,切换判定部59基于簧上(车身)的举动稳定、没有实质进行车辆10的加减速、且车辆10在直线前进行驶中这一主旨的可切换条件是否充分,来判定可否切换负荷控制模式。认为若是这样的可切换条件充分的情况,则即使进行了负荷控制模式的切换,对乘员带来不协调感的可能性也低。为便于说明,存在将遵照上述可切换条件的切换可否判定称为第2切换判定的情况。
106.具体地说,切换判定部59在簧上速度sv为规定的速度阈值svth以下、横加速度wg为规定的横加速度阈值wgth以下、前后加速度lg为规定的前后加速度阈值lgth以下这一主旨的可切换条件充分的情况下,发出能够将当前负荷控制模式向其他负荷控制模式切换这一主旨的判定。
107.此外,作为规定的速度阈值svth,能够适当设定适合判别簧上(车身)的举动是否稳定的值。
108.另外,作为规定的横加速度阈值wgth,能够适当设定适合判别车辆10是否在直线前进行驶中的值。
109.另外,作为规定的前后加速度阈值lgth,能够适当设定适合判别是否进行着车辆10的加减速的值。
110.基于切换判定部59得到的切换可否判定结果被发送到后级的负荷控制部45。
111.负荷控制部45遵照基于切换判定部59得到的切换可否判定结果,执行使用了规定的负荷控制模式的电磁致动器13的负荷控制。
112.详细地说,负荷控制部45在由切换判定部59发出了不可切换这一主旨的判定的情况下,维持当前负荷控制模式地执行电磁致动器13的负荷控制。
113.另一方面,负荷控制部45在由切换判定部59发出了可切换这一主旨的判定的情况下,将当前负荷控制模式向所需的负荷控制模式切换,并且使用切换后的负荷控制模式执行电磁致动器13的负荷控制。
114.〔电动悬架装置11的动作〕
115.接下来,参照图5a~图5d对本发明的实施方式所涉及的电动悬架装置11的动作进行说明。图5a是供说明本发明的实施方式所涉及的电动悬架装置11的动作的流程图。图5b、图5c是供说明图5a所示的路面判定处理(sub1)的动作的流程图。图5d是供说明图5a所示的切换判定处理(sub2)的动作的流程图。
116.在图5a所示的步骤s11中,负荷控制ecu15的信息获取部41分别获取包含簧上速度sv、簧上俯仰率pv、簧上翻滚率rv、预览图像pri、横加速度wg、前后加速度lg、电磁致动器13的冲程位置、涉及到电动马达31的马达电流在内的各种信息。
117.在步骤s12中,负荷控制ecu15的属于信息获取部41的路面数据生成部51基于预览图像pri或簧上速度sv的时序信息,生成包含涉及到车辆10的前方路面状态为平坦、存在凹凸或没有阶梯的信息的路面数据。
118.在步骤s13中,为了判别车辆10的前方路面是否是不平整路面,负荷控制ecu15的
属于信息获取部41的滤波处理部53从由路面数据生成部51生成的涉及到路面数据的时序信息中,提取涉及到规定频率的路面数据。
119.即,平稳振幅信号提取部53a进行从涉及到路面数据的时序信息提取属于第1频带(没有特别限定,例如为0.1~2hz左右)的“平稳振幅”信号成分的lpf处理。
120.轻震振幅信号提取部53b进行从涉及到路面数据的时序信息提取属于第2频带(没有特别限定,例如为3~8hz左右)的“轻震振幅”信号成分的bpf处理。
121.突震振幅信号提取部53c进行从涉及到路面数据的时序信息提取属于第3频带(没有特别限定,例如为4hz左右)的“突震振幅”信号成分的hpf处理。
122.在步骤s14中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55基于由滤波处理部53分为“平稳振幅”、“轻震振幅”、“突震振幅”这三个频带的涉及到路面数据的信号成分的时序信息,判定车辆10的前方路面状态是否属于“平稳”、“轻震”、“突震”。
123.在此,参照图5b、图5c对步骤s14所示的路面判定处理(sub1)进行说明。
124.在图5b所示的路面判定处理(sub1)的步骤s21中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判定基于预览图像信息pri得到的路面判定结果是否为“平稳”(pri:“平稳”?)。
125.在步骤s21的判定结果是基于预览图像信息pri得到的路面判定结果为“平稳”(步骤s21的是)的情况下,负荷控制ecu15使处理流程进入接口1(参照图5c)。
126.另一方面,在步骤s21的判定结果是基于预览图像信息pri得到的路面判定结果不为“平稳”(步骤s21的否)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s22。
127.在步骤s22中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判定基于预览图像信息pri得到的路面判定结果是否为“轻震”(pri:“轻震”?)。
128.在步骤s22的判定结果是基于预览图像信息pri得到的路面判定结果为“轻震”(步骤s22的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s23。
129.另一方面,在步骤s22的判定结果是基于预览图像信息pri得到的路面判定结果不为“轻震”(步骤s22的否)的情况下,负荷控制ecu15使处理流程跳到步骤s24。
130.在步骤s23中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55根据步骤s22中的基于预览图像信息pri得到的路面判定结果,确定车辆10的前方路面是“轻震”路面。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
131.在步骤s24中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判定基于3d陀螺仪传感器44等传感器检测信息gyr得到的路面判定结果是否为“轻震”(gyr:“轻震”?)。
132.在步骤s24的判定结果是基于传感器检测信息gyr得到的路面判定结果为“轻震”(步骤s24的是)的情况下,负荷控制ecu15使处理流程进入步骤s23。
133.另一方面,在步骤s24的判定结果是基于传感器检测信息gyr得到的路面判定结果不为“轻震”(步骤s24的否)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s25。
134.在步骤s25中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判定基于预览图像信息pri得到的路面判定结果是否为“突震”(pri:“突震”?)。
135.在步骤s24的判定结果是基于预览图像信息pri得到的路面判定结果为“突震”(步骤s25的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s26。
136.另一方面,在步骤s25的判定结果是基于预览图像信息pri的路面判定结果不为“突震”(步骤s25的否)的情况下,负荷控制ecu15使处理流程跳到步骤s27。
137.在步骤s26中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55根据步骤s25中的基于预览图像信息pri得到的路面判定结果,确定车辆10的前方路面是“平坦” “突震”的复合路面。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
138.在步骤s27中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55根据步骤s25中的基于预览图像信息pri得到的路面判定结果,确定车辆10的前方路面为“平坦”路面。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
139.另外,在以图5c所示的接口1为起点的步骤s31中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判断基于预览图像信息pri得到的路面判定结果是否为“轻震”(pri:“轻震”?)。
140.在步骤s31的判定结果是基于预览图像信息pri得到的路面判定结果为“轻震”(步骤s31的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s32。
141.另一方面,在步骤s31的判定结果是基于预览图像信息pri得到的路面判定结果不为“轻震”(步骤s31的否)的情况下,负荷控制ecu15使处理流程跳到步骤s33。
142.在步骤s32中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55根据步骤s31中的基于预览图像信息pri得到的路面判定结果,确定车辆10的前方路面为“平稳” “轻震”的复合路面。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
143.在步骤s33中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判定基于传感器检测信息gyr得到的路面判定结果是否为“轻震”(gyr:“轻震”?)。
144.在步骤s33的判定结果是基于传感器检测信息gyr得到的路面判定结果为“轻震”(步骤s33的是)的情况下,负荷控制ecu15使处理流程进入步骤s32。
145.另一方面,在步骤s33的判定结果是基于传感器检测信息gyr得到的路面判定结果不为“轻震”(步骤s33的否)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s34。
146.在步骤s34中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55判定基于预览图像信息pri得到的路面判定结果是否为“突震”(pri:“突震”?)。
147.在步骤s34的判定结果是基于预览图像信息pri得到的路面判定结果为“突震”(步骤s34的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s35。
148.另一方面,在步骤s34的判定结果是基于预览图像信息pri得到的路面判定结果不为“突震”(步骤s34的否)的情况下,负荷控制ecu15使处理流程跳到步骤s36。
149.在步骤s35中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55根据步骤s34中的基于预览图像信息pri得到的路面判定结果,确定车辆10的前方路面为“平稳” “突震”的复合路面。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
150.在步骤s36中,负荷控制ecu15的属于目标负荷运算部43的路面判定部55根据步骤s34中的基于预览图像信息pri得到的路面判定结果,确定车辆10的前方路面为“平稳”路面。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
151.另外,返回到图5a的主程序继续说明。
152.在图5a所示的步骤s15中,负荷控制ecu15的属于目标负荷运算部43的路面标志设定部57基于由属于路面判定部55的平稳判定部55a、轻震判定部55b、突震判定部55c得到的
判定结果来设定路面标志。
153.具体地说,路面标志设定部57在由平稳判定部55a发出了车辆10的前方路面状态属于“平稳”这一主旨的判定的情况下,设定“平稳”路面标志。
154.另外,路面标志设定部57在由轻震判定部55b发出了车辆10的前方路面状态属于“轻震”这一主旨的判定的情况下,设定“轻震”路面标志。
155.并且,路面标志设定部57在由突震判定部55c发出了车辆10的前方路面状态属于“突震”这一主旨的判定的情况下,设定“突震”路面标志。
156.在步骤s16中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59基于由路面标志设定部57设定的路面标志的设定内容,判定可否切换进行电磁致动器13的负荷控制时使用的负荷控制模式。
157.另外,负荷控制ecu15的属于目标负荷运算部43的切换判定部59基于由信息获取部41获取到的簧上速度sv、横加速度wg、前后加速度lg,判定可否切换进行电磁致动器13的负荷控制时使用的负荷控制模式。
158.在此,参照图5d对步骤s16所示的切换判定处理(sub2)进行说明。
159.在图5d所示的切换判定处理(sub2)的步骤s41中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59判定簧上速度sv是否为规定的速度阈值svth以下。
160.在步骤s41的判定结果是簧上速度sv为规定的速度阈值svth以下(步骤s41的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s42。
161.另一方面,在步骤s41的判定结果是簧上速度sv超过规定的速度阈值svth(步骤s41的否)的情况下,负荷控制ecu15使处理流程跳到步骤s45。
162.在步骤s42中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59判定横加速度wg是否为规定的横加速度阈值wgth以下。
163.在步骤s42的判定结果是横加速度wg为规定的横加速度阈值wgth以下(步骤s42的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s43。
164.另一方面,在步骤s42的判定结果是横加速度wg超过规定的横加速度阈值wgth(步骤s42的否)的情况下,负荷控制ecu15使处理流程跳到步骤s45。
165.在步骤s43中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59判定前后加速度lg是否为规定的前后加速度阈值lgth以下。
166.在步骤s43的判定结果是前后加速度lg为规定的前后加速度阈值lgth以下(步骤s43的是)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s44。
167.另一方面,在步骤s43的判定结果为前后加速度lg超过规定的前后加速度阈值lgth(步骤s43的否)的情况下,负荷控制ecu15使处理流程跳到步骤s45。
168.在步骤s44中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59发出可将当前负荷控制模式向其他负荷控制模式切换这一主旨的判定。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
169.另一方面,在步骤s45中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59发出不可将当前负荷控制模式向其他负荷控制模式切换这一主旨的判定。然后,负荷控制ecu15使处理流程返回到图5a所示的主程序。
170.另外,返回到图5a的主程序继续说明。
171.在图5a所示的步骤s17中,负荷控制ecu15的属于目标负荷运算部43的切换判定部59进行当前负荷控制模式的切换可否判定。
172.在步骤s17的判定结果是当前负荷控制模式不可切换(步骤s17的否)的情况下,负荷控制ecu15使处理流程进入接下来的步骤s18。
173.另一方面,在步骤s17的判定结果是可切换当前负荷控制模式(步骤s17的是)的情况下,负荷控制ecu15使处理流程跳到步骤s19。
174.在步骤s18中,负荷控制ecu15的负荷控制部45维持当前负荷控制模式地执行电磁致动器13的负荷控制。然后,负荷控制ecu15使一系列的处理流程结束。
175.另一方面,在步骤s19中,负荷控制ecu15的负荷控制部45执行使用了向其他负荷控制模式切换后的负荷控制模式的电磁致动器13的负荷控制。然后,负荷控制ecu15使一系列的处理流程结束。
176.〔本发明的实施方式涉及的电动悬架装置11的作用效果〕
177.基于第1观点的电动悬架装置11的前提为,电动悬架装置11具备设于车辆10的车身与车轮之间且产生用于使车身的振动衰减的负荷的致动器(电磁致动器13)。
178.基于第1观点的电动悬架装置11具备:路面状态检测部(摄像头42),其检测涉及到车辆10的前方路面的前方路面状态(预览图像信息pri);簧上状态量检测部(3d陀螺仪传感器44),其检测车辆10的簧上所涉及的簧上状态量(簧上速度sv);目标负荷运算部43,其基于预览图像信息pri及簧上速度sv对目标负荷进行运算;和负荷控制部45,其使用作为目标负荷运算部43的运算结果的目标负荷进行电磁致动器13的负荷控制。
179.目标负荷运算部43即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出该前方路面存在凹凸的这一主旨时,基于簧上速度sv进行目标负荷的运算。负荷控制部45进行使用了作为该运算结果的目标负荷的负荷控制。
180.在专利文献1(日本特开2017
‑
171156号公报)所涉及的电动悬架装置中,不检测车身与车轮之间的相对速度等车身振动状况,基于由预览传感器得到的路面状态的检测结果进行使车身的振动衰减的控制。
181.因此,假设路面状态的检测结果包含错误的情况下,不仅无法使车身的振动衰减,还有反而使车身的振动增大的隐患。其结果为,有与期待相反而导致车辆的乘坐感受恶化的隐患。
182.因此,在基于第1观点的电动悬架装置11中采用如下结构:目标负荷运算部43即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨时,进行使用了基于簧上速度sv进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制。
183.根据基于第1观点的电动悬架装置11,假设即使在基于由摄像头42得到的预览图像信息pri检测出的检测结果包含错误的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得到前方路面存在凹凸这一主旨时,进行使用了基于簧上速度sv进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制,因此,能够将车辆10的乘坐感受维持为舒适。
184.另外,基于第2观点的电动悬架装置11可以采用以下结构:在基于第1观点的电动悬架装置11中,负荷控制部45在目标负荷运算部43基于簧上速度sv进行了目标负荷的运算的情况下使用作为该运算结果的目标负荷来进行电磁致动器13的负荷控制时,以使当前的目标负荷逐渐接近该目标负荷的方式进行电磁致动器13的负荷控制。
185.即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨时,目标负荷运算部43进行基于簧上速度sv得到的目标负荷的运算。负荷控制部45进行使用了作为该运算结果的目标负荷的负荷控制。
186.在该情况下,在负荷控制部45中,取代基于主旨为前方路面没有凹凸的预览图像信息pri得到的当前的目标负荷,使用作为该运算结果的目标负荷来进行目标负荷的切换。
187.在此,参照图6对将基于第1负荷控制模式的第1目标负荷(当前)向基于第2负荷控制模式的第2目标负荷(切换后)切换的例子进行说明。
188.图6是供说明本发明的实施方式所涉及的电动悬架装置的动作的时间图。图6的(a)是表示第1及第2目标负荷各自的时序变化的时间图,图6的(b)是表示目标负荷的切换状态的切换标志的时序变化的时间图。
189.在图6的(a)中,例示了将基于第1负荷控制模式的第1目标负荷(当前)向基于第2负荷控制模式的第2目标负荷(切换后)切换的情形。
190.在时刻t0到即将t1之前及时刻t3以后,切换标志被设定为不可切换状态。但是,在时刻t1~t3的期间,切换标志被设定为可切换状态。
191.在时刻t1,切换标志的状态从不可切换向可切换转变。在此,若将时刻t1下的第1及第2目标负荷的大小作比较,则第1目标负荷比第2目标负荷大。像这样,若当前的第1目标负荷的大小与通过基于簧上速度sv进行的运算得到的第2目标负荷的大小不同,则在进行目标负荷的切换时,会给乘员带来不协调感。
192.因此采用以下结构:在时刻t1~t2的切换期间(参照图6),使用通过基于簧上速度sv进行的运算得到的第2目标负荷来进行电磁致动器13的负荷控制时,以使当前的目标负荷(第1目标负荷)逐渐接近第2目标负荷(参照图6中的第3目标负荷的特性线图)的方式进行电磁致动器13的负荷控制。
193.另外,在时刻t3,切换标志的状态从可切换向不可切换转变。在时刻t3,与上述时刻t1中的例子相反,第2目标负荷向第1目标负荷切换。
194.在此,若将时刻t3下的第1及第2目标负荷的大小作比较,则第1目标负荷比第2目标负荷大。像这样,若第1目标负荷的大小与通过基于簧上速度sv进行的运算得到的第2目标负荷的大小不同,则在进行目标负荷的切换时,会给乘员带来不协调感。
195.因此采用以下结构:在时刻t3~t4的切换期间(参照图6),在将第2目标负荷向第1目标负荷切换时,以使当前的目标负荷逐渐接近第1目标负荷(参照图6中的第3目标负荷的特性线图)的方式进行电磁致动器13的负荷控制。
196.总之,在基于第2观点的电动悬架装置11中采用以下结构:负荷控制部45在目标负荷运算部43基于簧上速度sv进行了目标负荷的运算的情况下使用作为该运算结果的目标负荷进行电磁致动器13的负荷控制时,以使当前的目标负荷逐渐接近该目标负荷的方式进
行电磁致动器13的负荷控制。
197.根据基于第2观点的电动悬架装置11,负荷控制部45在目标负荷运算部43基于簧上速度sv进行了目标负荷的运算的情况下使用作为该运算结果的目标负荷进行电磁致动器13的负荷控制时,以使当前的目标负荷逐渐接近该目标负荷的方式进行电磁致动器13的负荷控制,因此,与基于第1观点的电动悬架装置11相比,能够不给乘员带来不协调感地顺畅地进行目标负荷的切换。
198.另外,基于第3观点的电动悬架装置11可以采用以下结构:在基于第1或第2观点的电动悬架装置11中,簧上状态量包含簧上速度sv,目标负荷运算部43即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨时,仅在簧上状态量中的簧上速度sv为规定的速度阈值svth以下的情况下,基于该簧上速度sv进行目标负荷的运算。
199.如上述那样,若当前的目标负荷的大小与作为运算结果的目标负荷的大小不同,则在进行目标负荷的切换时,会给乘员带来不协调感。
200.因此,在基于第3观点的电动悬架装置11中采用以下结构:目标负荷运算部43即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨时,仅在簧上状态量中的簧上速度sv为规定的速度阈值svth以下的情况下,使用基于该簧上速度sv进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制。
201.根据基于第3观点的电动悬架装置11,即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨时,目标负荷运算部43仅在簧上状态量中的簧上速度sv为规定的速度阈值svth以下的情况下,进行使用基于该簧上速度sv进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制,因此与基于第2观点的电动悬架装置11同样地,能够不给乘员带来不协调感地顺畅地进行目标负荷的切换。
202.另外,基于第4观点的电动悬架装置11在基于第3观点的电动悬架装置11中,还具备信息获取部41,其获取涉及到车辆10是否在转弯中的信息、以及涉及到在车辆10中是否进行着加减速操作的信息。
203.目标负荷运算部43即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨的时,仅在车辆10为直线前进中且在车辆10中没有进行着加减速操作的情况下,基于簧上速度sv进行目标负荷的运算。
204.根据基于第4观点的电动悬架装置11,即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨的情况下,在基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果中得出前方路面存在凹凸这一主旨时,仅在车辆10为直线前进中且在车辆10中没有进行着加减速操作的情况下,进行使用了基于
簧上速度sv进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制,因此与基于第3观点的电动悬架装置11同样地,能够不给乘员带来不协调感地顺畅地进行目标负荷的切换。
205.另外,基于第5观点的电动悬架装置11在基于第1~第4观点的电动悬架装置11中,负荷控制部45在目标负荷运算部43基于簧上速度sv进行了目标负荷的运算的情况下,且在该负荷控制部45使用作为该运算结果的目标负荷执行电磁致动器13的负荷控制的过程中,即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面存在凹凸这一主旨的情况下,也使用作为上述运算结果的目标负荷继续进行电磁致动器13的负荷控制。
206.关于基于由摄像头42得到的预览图像信息pri检测出的检测结果,可知例如根据降雨、降雾等天气状态、夜间等的拍摄环境等,存在其精度降低的状态会持续的倾向。
207.因此,在基于第5观点的电动悬架装置11中采用以下结构:在使用通过基于簧上速度sv进行的运算得到的目标负荷执行电磁致动器13的负荷控制的过程中,即使在作为基于预览图像信息pri得到的检测结果而得出前方路面存在凹凸这一主旨的情况下,负荷控制部45也使用作为上述运算结果的目标负荷继续进行电磁致动器13的负荷控制。
208.因此,假设在担心基于预览图像信息pri得到的检测结果的精度降低的情况下,不进行基于预览图像信息pri的目标负荷控制。
209.根据基于第5观点的电动悬架装置11,在使用通过基于簧上速度sv进行的运算得到的目标负荷执行电磁致动器13的负荷控制的过程中,在作为基于预览图像信息pri得到的检测结果而得出前方路面存在凹凸这一主旨的情况下,被视为其检测结果的可靠性低,抑制基于预览图像信息pri的目标负荷控制的执行。
210.在该情形下,假设与执行被视为可靠性低的基于预览图像信息pri的目标负荷控制的情况相比,继续进行可靠性比较高的、使用了作为基于簧上速度sv的运算结果的目标负荷的电磁致动器13的负荷控制。
211.其结果为,根据基于第5观点的电动悬架装置11,与基于第1~第4观点的电动悬架装置11相比,能够将车辆10的乘坐感受维持为更舒适。
212.另外,基于第6观点的电动悬架装置11在基于第5观点的电动悬架装置11中,目标负荷运算部43在基于由3d陀螺仪传感器44得到的簧上速度sv进行了目标负荷的运算的情况下、且在为负荷控制部45使用作为该运算结果的目标负荷执行电磁致动器13的负荷控制的过程中的情况下,在作为基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果而得出前方路面没有凹凸这一主旨后,在基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面存在凹凸这一主旨的情况下,基于该预览图像信息pri进行目标负荷的运算。负荷控制部45使用作为该运算结果的目标负荷进行电磁致动器13的负荷控制。
213.在此,关于基于由3d陀螺仪传感器44得到的簧上速度sv进行目标负荷的运算的情况、且为负荷控制部45使用作为该运算结果的目标负荷执行电磁致动器13的负荷控制的过程中的情形,是作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面没有凹凸这一主旨后引起的。
214.另外,如上述那样,关于基于由摄像头42得到的预览图像信息pri检测出的检测结
果,可知例如根据降雨、降雾等天气状态、夜间等的拍摄环境,存在其精度降低的状态会持续的倾向。
215.在这样的情形下,即使在作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面存在凹凸这一主旨的情况下,不进行使用了基于预览图像信息pri进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制。
216.然后,等待能够期待基于由摄像头42得到的预览图像信息pri检测出的检测结果的可靠性恢复的机会的到来,重新开始使用基于预览图像信息pri进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制,在确保目标负荷控制的精度的观点上优选。
217.因此,在基于第6观点的电动悬架装置11中采用以下结构:目标负荷运算部43在基于由3d陀螺仪传感器44得到的簧上速度sv进行了目标负荷的运算的情况下、且在为负荷控制部45使用作为该运算结果的目标负荷执行电磁致动器13的负荷控制的过程中的情况下,在作为基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果而得出前方路面没有凹凸这一主旨后,在基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面存在凹凸这一主旨的情况下,基于该预览图像信息pri进行目标负荷的运算,负荷控制部45使用作为该运算结果的目标负荷进行电磁致动器13的负荷控制。
218.根据基于第6观点的电动悬架装置11,将作为基于由3d陀螺仪传感器44得到的簧上速度sv检测出的检测结果而得出前方路面没有凹凸这一主旨的机会捕捉为能够期待基于由摄像头42得到的预览图像信息pri检测出的检测结果的可靠性恢复的机会,在该机会到来后,等待作为基于由摄像头42得到的预览图像信息pri检测出的检测结果而得出前方路面存在凹凸这一主旨,重新开始使用基于预览图像信息pri进行的目标负荷的运算及作为该运算结果的目标负荷的负荷控制,因此,与基于第5观点的电动悬架装置11相比,确保目标负荷控制的精度,能够将车辆10的乘坐感受维持更进一步舒适。
219.〔其他实施方式〕
220.以上说明的多个实施方式是本发明的具现化的例子。因此,不利用这些实施方式限定性地解释本发明的技术范围。这是因为本发明在不脱离其要旨或其主要特征的情况下,能够以各种方式实施。
221.例如,在本发明所涉及的电动悬架装置11的说明中,作为相当于本发明所涉及的致动器的部件,例示将电动马达31的旋转驱动力向冲程方向转换并作用的电磁致动器13进行了说明,但本发明不限定于该例。
222.作为相当于本发明所涉及的致动器的部件,可以适用例如日本特开2015
‑
47906号公报所示那样的、单管式(mono
‑
tube type;de carbon type)的公知的衰减力可变式阻尼器。该衰减力可变式阻尼器将活塞杆能够沿轴向滑动地插入填充有mrf(磁粘性流体)的圆筒状的缸。在活塞杆的前端安装的活塞将缸内划分为上部油室和下部油室。在该活塞上设有将上部油室与下部油室连通的连通路、和位于该连通路的内侧的mlv线圈。
223.另外,在本发明的实施方式所涉及的电动悬架装置11的说明中,作为检测涉及到车辆10的前方路面的前方路面状态的路面状态检测部而例示摄像头42进行了说明,但本发明不限定于该例。
224.在本发明中,作为检测涉及到车辆10的前方路面的前方路面状态的路面状态检测部,也可以取代摄像头42或在此基础上,适当采用雷达、激光探测及测距系统。
225.此外,雷达通过向包含作为在车辆10的前方行驶的追踪对象的前行车在内的物标照射雷达波且同时接收由物标反射的雷达波,获取包含到物标为止的距离和物标方位在内的物标分布信息、涉及到车辆10的前方路面的预览图像信息pri。作为雷达波,能够适当使用激光、微波、毫米波、超声波等。
226.另外,激光探测及测距系统(lidar:light detection and ranging)通过例如计测针对照射光的散射光的检测所需要的时间,来检测有无物标、到物标的距离、以及涉及到车辆10的前方路面的预览图像信息pri。
227.另外,在本发明的实施方式所涉及的电动悬架装置11的说明中,列举将电磁致动器13在前轮(左前轮、右前轮)及后轮(左后轮、右后轮)的双方共计配置四个的例子进行了说明,但本发明并不限定于该例。也可以采用将共计两个电磁致动器13配置于前轮和后轮中的某一方的结构。
228.最后,在本发明的实施方式所涉及的电动悬架装置11的说明中,提及了分别独立地进行多个电磁致动器13的负荷控制的负荷控制部45。
229.具体地说,负荷控制部45可以针对各轮分别独立地进行四个轮子各自所具备的电磁致动器13的负荷控制。
230.另外,也可以针对前轮侧及后轮侧分别独立地进行四个轮子各自所具备的电磁致动器13的负荷控制,还可以针对左轮侧及右轮侧分别独立地进行四个轮子各自所具备的电磁致动器13的负荷控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
