1.本公开涉及动力机器。更具体地,本公开涉及使铰接式动力机器转向和用于使铰接式动力机器转向的牵引控制系统。
背景技术:
2.出于本公开的目的的动力机器包括产生动力以完成特定任务或各种任务的任何类型的机器。一种类型的动力机器是作业车辆。作业车辆,诸如装载机,通常是自推进式车辆,其具有作业装置,诸如提升臂(尽管一些作业车辆可以具有其他作业装置),提升臂可以被操纵以执行作业功能。作业车辆包括装载机、挖掘机、多用途车辆、拖拉机和挖沟机,仅举几个例子。
3.在使铰接式动力机器转向中,当转动时,机器前部分与后部分之间的铰接接头的角度通过一个或多个铰接致动器改变。当铰接接头的角度发生变化时,动力机器的一个或多个轮可能会在地面或其他支撑面上打滑。这可能是不可取的,尤其是在草皮或其他可能损坏的表面上操作动力机器时。
4.以上讨论仅被提供用于一般背景信息,并不旨在用于帮助确定要求保护的主题的范围。
技术实现要素:
5.在示例性实施例中,铰接式动力机器(100;200)包括前框架构件(212)、后框架构件(214)、可旋转地联接前后框架构件的铰接接头(216)以及被配置为通过改变铰接接头的铰接角度来使动力机器转动的铰接角度致动器(370)。动力转换系统(224)的驱动泵(224a)和转向控制回路(324)选择性地提供液压流体流。左侧驱动马达(226c;226d)联接到驱动泵并被配置为串联以接收来自驱动泵的液压流体流,以使左侧牵引元件(242a;244a)旋转。右侧驱动马达(226a;226b)联接到驱动泵并被配置为串联以接收来自驱动泵的液压流体流,以使右侧牵引元件(242b;244b)旋转,右侧驱动马达以与左侧驱动马达并联的方式联接到驱动泵。包括控制阀(330)的交叉馈送环路(340)设置在转向控制回路中,并选择性地提供从位于左侧驱动马达之间的连接(342)到位于右侧驱动马达之间的连接(344)的流体路径。转向控制单元(365)被配置为仅在转动操作期间在控制铰接角度致动器改变铰接接头的角度时产生控制信号(332),以控制控制阀(330)提供通过交叉馈送环路(340)的流体路径。在没有进行转动操作时,控制阀阻挡通过交叉馈送环路的流体路径。这允许牵引元件或轮在被铰接致动器改变铰接角度的动作促使转动时转动,并因此减少打滑。
6.一个总的方面包括一种铰接式动力机器(100、200),包括:前框架构件(212);后框架构件(214);可旋转地联接所述前框架构件和所述后框架构件的铰接接头(216);被配置为通过改变所述铰接接头的铰接角度来使所述动力机器转动的铰接角度致动器(370);液压转向回路(324),其包括驱动泵(224a)、联接到驱所述动泵并被配置为接收来自所述驱动泵的液压流体流以使左侧牵引元件(242a、244a)旋转的左侧驱动马达(226c,226d)、联接到
所述驱动泵并被配置为接收来自所述驱动泵的液压流体流以使右侧牵引元件(242b、244b)旋转的右侧驱动马达(226a、226b)以及被配置为选择性地提供从位于所述左侧驱动马达之间的连接(342)到位于所述右侧驱动马达之间的连接(344)的流体路径的交叉馈送环路(340)。所述铰接式动力机器还包括转向控制单元(365),其被配置为在进行所述转动操作时控制所述铰接角度致动器改变所述铰接接头的角度,其中所述转向控制单元还被配置为产生控制信号(332),以控制通过所述交叉馈送环路的流体路径,使得仅在所述转动操作期间控制所述铰接角度致动器改变所述铰接接头的角度时且不是在不进行转动操作时,才提供通过所述交叉馈送环路的流体路径。
7.实现方式可以包括以下特征中的一个或多个。铰接式动力机器,其中交叉馈送环路(340)包括与位于所述左侧驱动马达之间的连接(342)联接的第一液压通路(348)、与位于所述右侧驱动马达之间的连接(344)联接的第二液压通路(346)以及联接在所述第一液压通路(348)和所述第二液压通路(346)之间的控制阀(330),所述控制阀响应于所述控制信号选择性地提供从位于所述左侧驱动马达之间的连接(342)到位于所述右侧驱动马达之间的连接(344)的流体路径。
8.铰接式动力机器,其中所述左侧驱动马达(226c;226d)被配置为彼此串联以接收来自所述驱动泵的液压流体流以使所述左侧牵引元件(242a;244a)旋转,其中所述右侧驱动马达(226a;226b)被配置为彼此串联以接收来自所述驱动泵的液压流体流以使所述右侧牵引元件(242b;244b)旋转,并且其中所述右侧驱动马达以与所述左侧驱动马达并联的方式联接到所述驱动泵。铰接式动力机器,其中所述驱动泵与所述右侧驱动马达且与所述左侧驱动马达并联。铰接式动力机器,其中位于所述左侧驱动马达之间的连接(342)是所述左侧驱动马达之间的串联连接,并且其中位于所述右侧驱动马达之间的连接(344)是所述右侧驱动马达之间的串联连接。
9.铰接式动力机器还包括:转向输入装置(360),其被配置为由操作员操纵以通过响应地产生转向输入信号来控制转动操作,其中所述转向控制单元(365)被配置为控制所述铰接角度致动器及响应于所述转向输入信号来产生所述控制信号(332)。
10.铰接式动力机器还包括:牵引锁定回路(322),其具有联接在所述左侧驱动马达(226d)中的一个与所述驱动泵(224a)之间的第一电磁控制阀(325),并且具有联接在所述右侧驱动马达(226b)中的一个与所述驱动泵(224a)之间的第二电磁控制阀(326)。铰接式动力机器,其中所述牵引锁定回路还包括:第一节流孔口(318),其联接在所述左侧驱动马达(226d)中的一个与所述驱动泵(224a)之间;以及第二节流孔口(320),其联接在所述右侧驱动马达(226b)中的一个与所述驱动泵(224a)之间。
11.另一总体方面包括一种铰接式动力机器(100;200),包括:前框架构件(212);后框架构件(214);可旋转地联接所述前框架构件和所述后框架构件的铰接接头(216);被配置为通过改变所述铰接接头的铰接角度来使所述动力机器转动的铰接角度致动器(370);驱动泵(224a);左侧驱动马达(226c;226d),其联接到所述驱动泵并被配置为彼此串联以接收来自所述驱动泵的液压流体流,以使左侧牵引元件(242a;244a)旋转;右侧驱动马达(226a;226b),其联接到所述驱动泵并被配置为彼此串联以接收来自所述驱动泵的液压流体流,以使右侧牵引元件(242b;244b)旋转,所述右侧驱动马达以与所述左侧驱动马达并联的方式联接到所述驱动泵;交叉馈送环路(340),其包括控制阀(330)并选择性地提供从位于所述
左侧驱动马达之间的连接(342)到位于所述右侧驱动马达之间的连接(344)的流体路径;以及转向控制单元(365),其并被配置为在进行转动操作时控制所述铰接角度致动器改变所述铰接接头的铰接角度,其中所述转向控制单元还被配置为仅在所述转动操作期间在控制所述铰接角度致动器改变所述铰接接头的角度时产生控制信号(332),以控制所述控制阀提供通过所述交叉馈送环路的流体路径,所述控制阀在没有进行转动操作时阻挡通过所述交叉馈送环路的流体路径。
12.实现方式可以包括以下特征中的一个或多个。铰接式动力机器,其中交叉馈送环路(340)包括:第一液压通路(348),其联接在位于所述左侧驱动马达之间的连接(342)与所述控制阀(330)之间;以及第二液压通路(346),其联接在位于所述右侧驱动马达之间的连接(344)与所述控制阀(330)之间,所述控制阀响应于所述控制信号选择性地提供从位于所述左侧驱动马达之间的连接(342)通过第一和第二流体通路(348;346)到位于所述右侧驱动马达之间的连接(344)的流体路径。
13.铰接式动力机器,其中位于所述左侧驱动马达之间的连接(342)是所述左侧驱动马达之间的串联连接,并且其中,位于所述右侧驱动马达之间的连接(344)是所述右侧驱动马达之间的串联连接。
14.铰接式动力机器,还包括:转向输入装置(360),其被配置为由操作员操纵以通过响应地产生转向输入信号来控制转动操作,其中所述转向控制单元(365)被配置为控制所述铰接角度致动器及响应于所述转向输入信号来产生所述控制信号(332)。
15.铰接式动力机器,还包括:牵引锁定回路(322),其具有联接在所述左侧驱动马达(226d)中的一个与所述驱动泵(224a)之间的第一电磁控制阀(325),并且具有联接在所述右侧驱动马达(226b)中的一个与所述驱动泵(224a)之间的第二电磁控制阀(326)。铰接式动力机器,其中所述牵引锁定回路还包括:第一节流孔口(318),其联接在所述左侧驱动马达(226d)中的一个与所述驱动泵(224a)之间;以及第二节流孔口(320),其联接在所述右侧驱动马达(226b)中的一个与所述驱动泵(224a)之间。
16.提供本概述和摘要以引出在下面详细描述中进一步描述的以简化形式的概念的选择。本概述和摘要不旨在确定要求保护的主题的关键特征或必要特征,也不旨在用作确定要求保护的主题的范围的帮助。
附图说明
17.图1是示出了可以在其上有利地实践本公开的实施例的代表性动力机器的功能系统的框图。
18.图2是总体上示出了呈小型铰接式装载机形式的、可以在其上有利地实践本说明书中公开的实施例的动力机器的前部的立体图。
19.图3是总体上示出了图2所示的动力机器的背部的立体图。
20.图4是示出了动力机器诸如图2
‑
3所示的铰接式装载机的动力系统的部件的框图。
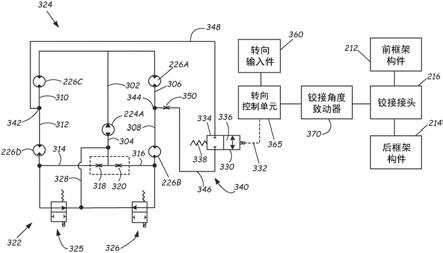
21.图5是根据说明性实施例的转向控制回路的部分的示意图,该转向控制回路提供交叉馈送环路以减少转动操作期间的打滑。
具体实施方式
22.在该讨论中公开的概念通过参考示例性实施例进行描述和说明。然而,这些概念在它们的应用方面不限于说明性实施例中的构造细节和部件布置,并且能够以各种其他方式实践或执行。本文件中的术语用于描述目的,并且不应被视为是限制性的。如本文所用的诸如“包括”、“包含”和“具有”及其变体等词语意在涵盖其后列出的项、其等同物以及附加项。
23.公开的实施例包括用于铰接式框架动力机器的驱动回路。驱动回路在机器的左侧和右侧上具有用于两个前轮中的每一个的驱动马达和两个后马达。左侧和右侧中的每一侧上的前驱动马达和后驱动马达串联。驱动回路的左侧和右侧彼此并联。这种布置有利地提供了在不平地形中的改进的牵引力。然而,使用这种类型的布置可能导致一个或多个轮在转弯期间(即在框架的铰接期间)打滑。
24.所公开的实施例利用了铰接式动力机器转向回路的左驱动马达侧和右驱动马达侧之间的可控交叉馈送环路。设置交叉馈送环路以减少由铰接致动器改变动力机器的前框架构件与后框架构件之间的铰接接头角度的转动操作引起的打滑。通过仅在转动操作期间允许液压流体流动通过动力机器的左侧和右侧之间的交叉馈送环路,允许了轮或牵引元件在铰接致动器改变铰接角度所施加的力促使轮或牵引元件转动时转动。在驱动器施加的力的作用下转动。铰接接头的角度的变化。这有助于减少打滑,尤其是在低动力机器速度处。
25.所公开的实施例有利地提供了指示何时已经命令铰接的信号。当该信号提供给交叉馈电回路回路时,交叉馈电回路被激活,从而为驱动回路提供其优势。
26.这些概念可以在各种动力机器上实践,如下面将描述的。可以在其上实践实施例的代表性动力机器在图1中以图形式示出,这种动力机器的一个示例在图2
‑
3中示出并且在公开任何实施例之前在下面描述。为简洁起见,只讨论一种动力机器。然而,如上所述,下面的实施例可以在包括与图2
‑
3所示的代表性动力机器不同类型的动力机器在内的多种动力机器中的任一种上实践。出于本讨论的目的的动力机器包括框架、至少一个作业元件和可以为作业元件提供动力以完成作业任务的动力源。一种类型的动力机器是自推进式作业车辆。自推进式作业车辆是包括框架、作业元件和可以为作业元件提供动力的动力源的一类动力机器。作业元件中的至少一个作业元件是用于使动力机器在动力下移动的发动系统。
27.图1是说明动力机器100的基本系统的框图,可以在该动力机器上有利地结合以下讨论的实施例并且该动力机器可以是多种不同类型的动力机器中的任一种。图1的框图标识了动力机器100上的各种系统以及各种部件和系统之间的关系。如上所述,在最基本的层面上,出于本讨论目的的动力机器包括框架、动力源和作业元件。动力机器100具有框架110、动力源120和作业元件130。由于图1所示的动力机器100是自推进式作业车辆,因此它还具有牵引元件140和操作员站150,牵引元件本身是被设置为使动力机器在支撑表面上移动的作业元件,操作员站提供用于控制动力机器的作业元件的操作位置。设置控制系统160以与其他系统交互以至少部分地响应于操作员提供的控制信号来执行各种作业任务。
28.某些作业车辆具有可以执行专用任务的作业元件。例如,一些作业车辆具有提升臂,诸如铲斗之类的工具诸如通过销钉布置附接到该提升臂。作业元件,即提升臂,可以被操纵以定位工具以执行任务。在一些情况下,工具可以相对于作业元件被定位,诸如通过使铲斗相对于提升臂旋转,以进一步定位工具。在这种作业车辆的正常操作下,铲斗旨在被附
接和进行使用。这种作业车辆可以通过拆卸工具/作业元件组合并重新组装另一工具代替原来的铲斗来接受其他工具。然而,其他作业车辆旨在与各种各样的工具一起使用,并具有工具接口,诸如图1所示的工具接口170。从最基本的意义上说,工具接口170是框架110或作业元件130与工具之间的连接机制,其可以像用于将工具直接附接到框架110或作业元件130的连接点一样简单或更复杂,如下面讨论的
29.在一些动力机器上,工具接口170可以包括工具承载件,工具承载件是可移动地附接到作业元件的物理结构。工具承载件具有接合特征和锁定特征以将多种不同的工具中的任一种接受并固定到作业元件。这种工具承载件的一个特性是,一旦工具附接到它,工具承载件就固定到工具(即不可相对于工具移动)并且当工具承载件相对于作业元件移动时,工具与工具承载件一起移动。在此使用的术语工具承载件不仅仅是枢轴连接点,而是特别旨在接受和被固定到各种不同工具的专用装置。工具承载件本身可安装到作业元件130,诸如提升臂或框架110。工具接口170还可以包括一个或多个动力源,用于向工具上的一个或多个作业元件提供动力。一些动力机器可以具有多个具有工具接口的作业元件,每个工具接口可以但不必具有用于接收工具的工具承载件。一些其他的动力机器可以具有带有多个工具接口的作业元件,使得单个作业元件可以同时接受多个工具。这些工具接口中的每个工具接口可以但不必具有工具承载件。
30.框架110包括可以支撑附接到其或定位在其上的各种其他部件的物理结构。框架110可以包括任何数量的单独部件。一些动力机器的框架是刚性的。即,框架的任何部分都不可相对于框架的另一部分移动。其他动力机器的至少一个部分可以相对于框架的另一部分移动。例如,挖掘机可以具有相对于下框架部分旋转的上框架部分。其他作业车辆具有铰接式框架,使得框架的一个部分相对于另一部分枢转以完成转向功能。
31.框架110支撑动力源120,动力源可以向包括一个或多个牵引元件140在内的一个或多个作业元件130提供动力,以及在一些情况下提供动力以经由工具接口170供附接的工具使用。来自动力源120的动力可以直接提供给作业元件130、牵引元件140和工具接口170中的任何一者。替代性地,来自动力源120的动力可以提供给控制系统160,控制系统又选择性地为能够使用动力来执行作业功能的元件提供动力。用于动力机器的动力源典型地包括发动机诸如内燃机及能够将发动机的输出转换为可供作业元件使用的动力形式的动力转换系统诸如机械传动装置或液压系统。其他类型的动力源可以并入动力机器中,包括电源或者通常称为混合动力源的动力源的组合。
32.图1示出了指定为作业元件130的单个作业元件,但是各种动力机器可以具有任何数量的作业元件。作业元件典型地附接到动力机器的框架,并可在执行作业任务时相对于框架移动。此外,牵引元件140是作业元件的特殊情况,因为它们的作业功能通常是使动力机器100在支撑表面上移动。牵引元件140被示出为与作业元件130分开,因为许多动力机器除了牵引元件之外还具有附加的作业元件,尽管情况并非总是如此。动力机器可以具有任何数量的牵引元件,牵引元件中一些或全部可以从动力源120接收动力以推进动力机器100。牵引元件可以是例如附接到车轴的轮、履带组件等。牵引元件可以安装到框架,使得牵引元件的移动被限制为围绕车轴旋转(从而通过滑动动作实现转向),或者替代性地枢转地安装到框架以通过使牵引元件相对于框架枢转来实现转向
33.动力机器100包括操作员站150,操作员站包括操作位置,操作员可以从该位置控
制动力机器的操作。在一些动力机器中,操作员站150由封闭的或部分封闭的驾驶室限定。可以在其上实践所公开的实施例的一些动力机器可能不具有驾驶室或上述类型的操作员隔室。例如,手扶式装载机可能不具有驾驶室或操作员隔室,而是一操作位置,该操作位置用作操作员站,动力机器从该操作员站被适当操作。更广泛地,除作业车辆之外的动力机器可能具有与上述操作位置和操作员隔室不一定相似的操作员站。此外,一些动力机器,诸如动力机器100等,无论它们是具有操作员隔室、操作员位置还是两者都没有,可能能够被远程操作(即从位于远程的操作员站),代替在动力机器附近或上的操作员站或作为对其的补充。这可以包括这样的应用,其中动力机器的至少一些操作员控制的功能可以从与联接到动力机器的工具相关联的操作位置进行操作。替代性地,对于一些动力机器,可以提供远程控制装置(即远离动力机器和与其联接的任何工具两者),远程控制装置能够控制动力机器上的至少一些操作员控制的功能。
34.图2
‑
3示出了为图1所示类型的动力机器的一个特定示例的装载机200,其中可以有利地采用下面讨论的实施例。装载机200是具有安装在前部的提升臂组件230的铰接式装载机,在该示例中,提升臂组件是伸缩式提升臂。装载机200是图1中广泛示出并在上面讨论的动力机器100的一个特定示例。为此,下面描述的装载机200的特征包括与图1中使用的那些大体相似的附图标记。例如,装载机200被描述为具有框架210,正如动力机器100具有框架110。本文参照图2
‑
3对装载机200的描述提供了对下述环境的说明,在所述环境中,下面讨论的实施例和该描述不应被视为是限制性的,特别是对于对所公开的实施例不是必不可少的装载机200的特征的描述。这些特征可以被包括或可以不被包括在除了在其上可以有利地实践以下公开的实施例的装载机200之外的动力机器中。除非另有明确说明,否则下面公开的实施例可以在多种动力机器上实践,装载机200只是那些动力机器中的一种。例如,下面讨论的一些或全部概念可以在许多其他类型的作业车辆上实践,诸如各种其他装载机、挖掘机、挖沟机和推土机,仅举几个例子。
35.装载机200包括支撑动力系统220的框架210,动力系统可以产生或以其他方式提供动力以使动力机器上的各种功能运行。框架210还支撑呈提升臂组件230形式的作业元件,作业元件由动力系统220提供动力并且可以执行各种作业任务。由于装载机200是作业车辆,因此框架210还支撑牵引系统240,牵引系统也由动力系统220提供动力并且可以在支撑表面上推动动力机器。提升臂组件230又支撑工具接口270,工具接口包括工具承载件272和动力联接器274,工具承载件可以接收各种工具并将其固定到装载机200以执行各种作业任务,工具可以联接到动力联接器以选择性地给可能连接到装载机的工具提供动力。动力联接器274可以提供液压源或电动力源或两者。装载机200包括限定操作员站255的驾驶室250,操作员可以从操作员站操纵各种控制装置以使动力机器执行各种作业功能。驾驶室250包括为操作员隔室提供顶部的顶篷252并被配置为在座椅的一侧(在图3所示的示例中,左侧)具有入口254以允许操作员进出驾驶室。尽管如图所示的驾驶室250不包括任何窗或门,但可以提供门或窗。
36.操作员站255包括操作员座椅258和各种操作输入装置260,操作输入装置包括操作员可以操纵以控制各种机器功能的控制杆。操作员输入装置可以包括转向盘、按钮、开关、杆、滑块、踏板等,其可以是独立的装置诸如手动操作的杆或脚踏板,或者被并入手柄或包括可编程输入装置在内的显示面板中。操作员输入装置的致动可以产生电信号、液压信
号和/或机械信号形式的信号。响应于操作员输入装置而产生的信号被提供给动力机器上的各个部件,以控制动力机器上的各个功能。通过动力机器100上的操作员输入装置控制的功能包括对牵引系统240、提升臂组件230、工具承载件272的控制,以及向可以可操作地联接到工具的任何工具提供信号。
37.装载机可以包括人机界面,人机界面包括设置在驾驶室250中以便以操作员可以感觉到的形式给出与动力机器的操作相关的信息的指示例如声音和/或视觉指示的显示装置。可以以蜂鸣、铃声等形式或经由口头交流来发出声音指示。可以以图形、灯、图标、仪表、字母数字字符等形式做出视觉指示。显示器可以专用于提供专用指示诸如警告灯或仪表,或者是动态的以提供可编程信息,包括可编程显示装置诸如各种尺寸和性能的监视器。显示装置可以提供诊断信息、故障排除信息、指导信息和帮助操作员操作动力机器或与动力机器联接的工具的各种其他类型的信息。还可以提供可能对操作员有用的其他信息。其他动力机器诸如手扶式装载机可能没有驾驶室、操作员隔室或座椅。这种装载机上的操作员位置通常是相对于操作员最适合操纵操作员输入装置的位置来限定的。
38.可以包括下面讨论的实施例和/或与下面讨论的实施例相互作用的各种动力机器可以具有支撑各种作业元件的各种不同的框架部件。此处讨论的框架210的元件是出于说明性目的而提供的,并且不应被认为是可以在其上实践实施例的动力机器可以采用的唯一类型的框架。如上所述,装载机200是铰接式装载机并且因此具有在铰接接头处枢转地联接在一起的两个框架构件。出于本文件的目的,框架210是指装载机的整个框架。装载机200的框架210包括前框架构件212和后框架构件214。前框架构件212和后框架构件214在铰接接头216处联接在一起。提供致动器(未示出)以使前框架构件212和后框架构件214围绕轴线217相对于彼此旋转以实现转动。
39.前框架构件212在接头216处支撑提升臂230并且可操作地联接到提升臂。提升臂缸(未示出,位于提升臂230下方)联接到前框架构件212和提升臂230并且可操作以在动力下升高和降低提升臂。前框架构件212还支撑前轮242a和242b。前轮242a和242b安装到刚性车轴(车轴不相对于前框架构件212枢转)。驾驶室250也由前框架构件212支撑,使得当前框架构件212相对于后框架构件214铰接时,驾驶室250与前框架构件212一起移动,使得其将相对于后框架构件214会向两侧摆动,这取决于装载机200被转向的方式。
40.后框架构件214支撑动力系统220的包括内燃发动机在内的各个部件。此外,一个或多个液压泵联接到发动机并由后框架构件214支撑。液压泵是动力转换系统的一部分,以将来自发动机的动力转换成可以由装载机200上的致动器(诸如缸和驱动马达)使用的形式。下面更详细地讨论动力系统220。此外,后轮244a和244b安装到刚性车轴,刚性车轴又安装到后框架构件214。当装载机200指向直线方向时(即,前框架部分212与后框架部分214对准),驾驶室的一部分位于后框架部分214上。
41.图2
‑
3中所示的提升臂组件230许多不同类型的提升臂组件的一个示例,这些提升臂组件可以附接到动力机器诸如装载机200或可以在其上实践本讨论的实施例的其他动力机器。提升臂组件230是径向提升臂组件,因为提升臂在提升臂组件的一个端部处安装到框架210并且随着安装接头216被升高和降低而围绕安装接头枢转。提升臂组件230也是伸缩式提升臂。提升臂组件包括在接头216处枢转地安装到前框架构件212的悬臂232。伸缩式构件234可滑动地插入悬臂232,伸缩式缸(未示出)联接到悬臂和伸缩式构件并且可操作以使
伸缩式构件在动力下伸出和缩回。伸缩式构件234在图2和3中被示出为处于处于完全缩回位置。包括工具承载件272和动力联接器274的工具接口270可操作地联接到伸缩式构件234。工具承载件安装结构276安装到伸缩式构件。工具承载件272和动力联接器274安装到定位结构。倾斜缸278枢转地安装到工具承载件安装结构276和工具承载件272两者,并且可操作以使工具承载件在动力下相对于工具承载件安装结构旋转。操作员隔室255中的操作员控件260中有允许操作员控制提升臂组件230的提升、伸缩和倾斜功能的操作员控件。
42.其他提升臂组件可以具有不同的几何形状并且可以以各种方式联接到装载机的框架以提供不同于提升臂组件230的径向路径的提升路径。例如,其他装载机上的一些提升路径提供径向提升路径。其他的具有联接在一起以作为提升臂组件起作用的多个提升臂。其他提升臂组件还不具有伸缩式构件。其他的具有多个部段。除非另外明确规定,否则本讨论中阐述的本发明概念均不受联接到特定动力机器的提升臂组件的类型或数量的限制。
43.图4更详细地示出了动力系统220。广义上讲,动力系统220包括一个或多个动力源222,其可以产生和/或储存用于使各种机器功能运行的动力。在装载机200上,动力系统220包括内燃发动机。其他动力机器可以包括发马达、可充电电池、各种其他动力源或可为给定动力机器部件提供动力的动力源的任意组合。动力系统220还包括动力转换系统224,其可操作地联接到动力源222。动力转换系统224又联接到一个或多个致动器226,一个或多个致动器可以在动力机器上执行功能。各种动力机器中的动力转换系统可以包括各种部件,包括机械变速器、液压系统等。动力机器200的动力转换系统224包括,其提供动力信号以驱动马达226a、226b、226c和226d。四个驱动马达226a、226b、226c和226d又分别各自可操作地联接到四个车轴228a、228b、228c和228d。尽管未示出,但四个车轴分别联接到轮242a、242b、244a和244b。静液压驱动泵224a可以机械地、液压地和/或电力地联接到操作员输入装置以接收用于控制驱动泵的致动信号。动力转换系统还包括工具泵224b,其也由动力源222驱动。工具泵224b被配置为向作业致动器回路238提供加压。作业致动器回路238与作业致动器239连通。作业致动器239代表多个致动器,包括提升缸、倾斜缸、伸缩式缸等。作业致动器回路238可以包括阀和其他装置以选择性地向由图4中的框239表示的各种作业致动器提供加压液压流体。此外,作业致动器回路238可以被配置为向附接的工具上的作业致动器提供加压液压流体。
44.以上对动力机器100和装载机200的描述是出于说明性目的提供的,以提供可以在其上实践以下讨论的实施例的说明性环境。尽管所讨论的实施例可以在动力机器诸如由图1的框图中所示的动力机器100总体上描述的动力机器上并且更特别地在装载机诸如铰接式装载机200上实践,但是除非另外说明或叙述,否则以下所讨论的概念文并不旨在将它们的应用限制于上面具体描述的环境。
45.现在参考图5,示出了液压转向回路324和有助于理解液压转向回路的操作的相关部件。如上所述,当铰接式装载机转动时,或者更准确地说,当铰接接头216的角度改变时,轮242(图2和图3所示)中的一些轮可能打滑,从而对一些表面诸如草皮造成损坏。允许轮独立转动减小或最小化这种影响。转向回路324包括交叉馈送环路340,如下所述,其控制马达226a
‑
226d以允许轮在铰接接头的角度改变时自由转动,从而最小化打滑。
46.回路324包括上面参考图4讨论的驱动泵224a和驱动马达226a
‑
226d。在一个示例实施例中,双向驱动泵224a通过液压管线302液压地联接到右前和左前驱动马达226a和
226c,并通过管线304、314和316液压地联接到右后和左后驱动马达226b和226d。在一些实施例中,可以在驱动泵224a与驱动马达226b和226d之间或其他地方包括流量节流孔口318和320。右侧驱动马达226a和226b通过液压管线306和308串联地液压联接,而左侧驱动马达226c和226d通过液压管线310和312串联地液压联接。如上所述,左侧和右侧彼此并联。因此,来自泵224a的液压流沿一个方向行进通过所有四个驱动马达以引起向前行进或沿另一方向以引起向后行进。
47.在液压转向回路324中还示出了一对电磁控制阀325和326,它们分别通过液压管线328联接到驱动泵224a及联接到驱动马达226b和226d中的每一个。电磁控制阀325和326是可选的电子控制的牵引锁定回路322的部分,并且在公开的实施例中不需要。节流孔口318和320也是该牵引锁定回路的一部分并且不需要作为交叉馈送回路的一部分。
48.动力机器200的转向输入件360——其可以是参考图2
‑
3讨论的操作员输入装置260的子集——向转向控制单元365提供转向输入信号。例如,转向输入件360可以包括转向盘、操纵杆控件、控制杆或其他转向控制装置。转向控制单元365可以是适当配置的电子控制单元、液压控制装置或回路、机械控制装置或其他装置,其被配置为响应来自转向输入件360的转向输入信号来控制铰接角度致动器370,以控制前框架构件212与后框架构件214之间的铰接接头216的角度以使动力机器转动。
49.转向回路324在铰接接头216的角度被致动器370改变的转动操作期间影响并控制四个驱动马达226a
‑
226d之间的关系。为了减少这种转动操作期间的打滑,在机器的左侧和机器的右侧之间的转向回路324中设置交叉馈送环路340,这在转动操作期间可能是有利的。交叉馈送环路340在位于左侧驱动马达226c和226d之间的流体连接点342与位于右侧驱动马达226a和226b之间的流体连接点344之间提供选择性控制的双向流体路径。在示例性实施例中,交叉馈送环路340包括联接到连接点344的第一液压管线或通路346、联接到连接点342的第二液压管线或通路348以及位于通路346和348之间的锁定电磁控制阀330。节流件350也可以包括在通路346和348之一中。节流件350在转向致动发生时提高牵引效力。更具体地,节流件350限制连接点342和344之间的流动以防止导致马达相对于马达的设计速度以过高的速度旋转的可能性(通过将意在在左手侧和右手侧之间分流的流动的大部分或全部仅提供给左侧和右侧之一)。这种超速状况可能损坏马达和/或导致打滑或磨损。此外,在这种超速状况下,牵引效力将接近于零,使机器无法有效移动。在一些实施例中,节流件350是孔口。在其他实施例中,可以使用其他液压部件来实现类似类型的限制。流体连接点342和流体连接点344之间的流动方向取决于转向铰接的方向。
50.锁定电磁控制阀330具有阻止转向控制回路的左侧和右侧之间的横向流动的第一阀位置334和允许左侧和右侧之间的横向流动的第二阀位置336。弹簧或其他偏置机构338可以用于将控制阀330朝向第一阀位置334偏置以阻止横向流动,除非转向控制单元365正被转向输入件360激活,并产生对应的控制信号332以命令控制阀允许横向流动。仅当转向控制单元通过来自转向输入件360的信号指示希望改变铰接接头216的角度时,转向控制单元365才向锁定螺线管提供信号。当被激活时,来自回路324的一侧(连接点344处)的油可以被提供到回路324的另一侧(连接点342处),或反之亦然,以允许马达以它们被转动操作的作用所促使的方式移动。如上所述,提供孔口350以限制通过交叉馈送环路340的流动以防止轻载轮以高速率旋转。孔口350因此将牵引效力保持在提高的水平。
51.当动力机器不移动(向前或向后)并且正在进行转动操作时(例如左转弯,其中机器的前部分相对于后部分向左倾斜),锁定控制阀330被控制为处于第二阀位置336,从而允许油从右手侧(连接点344处)通过交叉馈送环路340传递到左手侧(连接点342处)。这允许左前驱动马达226c和左后驱动马达226d以与其右侧对应物相反的方向转动,从而防止或减少相关轮的任何打滑动作。当驱动泵224a开始在一个方向上(例如,向前)提供流动时,所有的驱动马达将在由驱动泵提供的流动方向上增加给定的量,直到所有的驱动马达都在相同的方向上移动。当转向控制单元不再使用铰接角度致动器370主动命令改变铰接接头的角度时,锁定控制阀330返回到第一阀位置334并由此关闭交叉馈送环路340。当交叉馈送环路340关闭时(即,当操作员不再发出意图转弯的信号时),驱动系统返回到更高的牵引效力能力,这为操作员提供了草皮友好转向和机器不转弯时的最大牵引效力的好处。因为阀330响应于转向输入件被控制,所以操作员无需执行任何其他操作来切换阀330即可获得这些好处。
52.以上讨论的实施例提供了几个重要的优点。利用上述串并联关系设计的驱动系统,动力机器在正常运行时能够提供理想的牵引效力。包含交叉馈送环路允许机器暂时牺牲一些牵引效力,以减少机器在转弯期间损坏草皮的可能性。另一相关的好处是减少坚硬表面诸如沥青或混凝土上的打滑将提高轮胎寿命。交叉馈送环路还有利地响应于转向命令而自动接合,使得操作员不必发起对这种环路的使用。
53.尽管已经参考优选实施例描述了本发明,但是本领域技术人员将认识到,在不脱离本文讨论的概念的精神和范围的情况下,可以对公开的实施例进行形式和细节上的改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
