1.本实用新型属于煤矿井下无轨辅助运输机器人制动控制的技术领域,具体公开了一种煤矿无轨辅助运输机器人的人机交互式线控制动系统。
背景技术:
2.煤矿井下无轨辅助运输设备由于具有高效能、多用途、机动灵活和技术先进等特点,在国外一些采煤技术先进的国家比如美国、澳大利亚、英国、南非等都得到了非常广泛的应用,且发展迅速。90年代中后期,我国为改变煤矿辅助运输方式落后于采掘技术发展的状况,神东、兖州和晋城等大型矿区先后引进成套无轨胶轮运输设备,在平峒、立井和斜井中都得到了成功应用,使用这一新型辅助运输方式后显著提高了辅助运输和矿井全员生产效率。
3.随着我国煤炭开采技术和装备自主创新研究的重大进展,综采自动化技术、综掘系列装备等领域都实现了重大突破,取得了良好的应用效果和经济效益,使我国煤炭开采技术和采掘装备整体上达到国际先进水平,实现了综采工作面生产过程的自动化。近年来,智慧矿山理念的提出更是吹响了煤炭行业进军智能化、信息化和无人化建设新阶段的号角。同时,智慧矿山建设也对煤矿辅助运输系统提出了连续化、标准化、智能化、少人化和信息化的发展要求,以实现煤矿井下人员和材料的智能调度配送、综采工作面设备的自动化安装回撤及综掘工作面的自动化物料保障。
4.当前煤矿辅助运输系统尚处于机械化发展阶段,难以适应智能综采工作面、无人掘进面等新技术发展的需要,已成为智慧矿山建设的发展瓶颈。现有的无轨辅助运输系统难以适应智能综采无人工作面、无人掘进面等新技术发展需要,亟需发展以物联网、自动化装备相结合的智能无轨辅助运输系统,弥补智能化矿井短板。当前无轨辅助运输系统存在的主要问题有:
①
煤矿井下物料需求种类繁杂、运输作业量大、运输工作随机性高,物料配送过程以机械化系统为主,自动化、信息化程度低,难以符合标准化和智能化的现代物流标准;
②
井下运输设备以防爆柴油机动力为主,系统能耗较高,车辆尾气、噪音污染严重,严重威胁相关从业人员的身心健康;
③
辅助运输设备受制于井下防爆要求,电气化和信息化程度普遍较低,以机械和液压系统为主,系统繁杂、环节较多、管路密布、可靠性低、维护量大;
④
主要运输设备以司机驾驶操作和人工调度为主,自动化程度较低,难以实现少人化要求。
5.线控制动系统是指线控制动或保持原地不动的所有元部件的总成,是煤矿无轨辅助运输机器人安全运行的重要保障。煤矿无轨辅助运输机器人打破以往的驾驶员操作的人为控制制动系统,使用线控can总线远程遥控控制制动系统,一旦煤矿无轨辅助运输机器人制动系统失效,往往会造成严重的煤矿事故和财产损失。因此,煤矿无轨辅助运输机器人线控制动系统的制动性能好坏是制约矿井辅助运输发展的重要因素。
技术实现要素:
6.本实用新型的目的在于提供一种煤矿无轨辅助运输机器人的人机交互式线控制
动系统,提高煤矿无轨辅助运输机器人运行的安全性。
7.为实现上述目的,本实用新型提供一种煤矿无轨辅助运输机器人的人机交互式线控制动系统,包括吸油过滤器、液压泵、安全阀、双路充液阀、制动蓄能器ⅰ、制动蓄能器ⅱ、制动蓄能器ⅲ、脚踏制动阀、减压阀、驻车常开球阀、电控比例减压阀ⅰ、电控比例减压阀ⅱ、手动制动阀、液控压力自适应选择阀ⅰ、液控压力自适应选择阀ⅱ、液控压力自适应选择阀ⅲ、前桥轮边制动器、后桥轮边制动器、驻车制动器和液压油箱;吸油过滤器的进油口与液压油箱连接,出油口与压油泵的进油口连接;液压泵的出油口分别与双路充液阀的p口和安全阀的进油口连接,安全阀的出油口接回油箱;双路充液阀的a1口、a2口和sw口分别与制动蓄能器ⅰ、制动蓄能器ⅱ和制动蓄能器ⅲ连接;双路充液阀与制动蓄能器ⅰ之间引出油路分别与脚踏制动阀的zdp1口和电控比例减压阀ⅰ的jyp1口连接,脚踏制动阀的zda1口和电控比例减压阀ⅰ的jya1口分别与液控压力自适应选择阀ⅰ的xzb1口和xza1口连接,液控压力自适应选择阀ⅰ的xzc1口与前桥轮边制动器连接;双路充液阀与制动蓄能器ⅱ之间引出油路分别与脚踏制动阀的zdp2口和电控比例减压阀ⅱ的jyp2口连接,脚踏制动阀的zda2口和电控比例减压阀ⅱ的jya2口分别与液控压力自适应选择阀ⅱ的xzb2口和xza2口连接,液控压力自适应选择阀ⅱ的xzc2口与后桥轮边制动器连接;双路充液阀与制动蓄能器ⅲ之间引出油路与减压阀的jyp3口连接,减压阀的jya3口分别与驻车常开球阀的qfp1口和手动制动阀的sdp1口连接,驻车常开球阀的qfa1口和手动制动阀的sda1口分别与液控压力自适应选择阀ⅲ的xza3口和xzb3口连接,液控压力自适应选择阀ⅲ的xzc3口与驻车制动器连接;脚踏制动阀的zdt1和zdt2口、驻车常开球阀的qft1口以及手动制动阀的sdt1口均接回液压油箱;前桥轮边制动器和后桥轮边制动器为液压制动、弹簧释放型制动器,驻车制动器为弹簧制动、液压释放型制动器。
8.进一步地,上述煤矿无轨辅助运输机器人的人机交互式线控制动系统,还包括手压泵,手压泵的s1口与液压油箱连接,p2口与双路充液阀连接。
9.进一步地,煤矿无轨辅助运输机器人的人机交互式线控制动系统,安全阀安装在安全阀组内;安全阀组的1口与液压泵的p口连接,3口与双路充液阀和手压泵的连接点相连,4口与液压油箱连接,1口与3口相通,1口通过安全阀与4口连接。
10.进一步地,安全阀组的2口与1口相通,2口与压力表ⅰ连接。
11.进一步地,双路充液阀的sw口与制动蓄能器ⅲ和减压阀的连接点之间接有低压报警开关。
12.进一步地,双路充液阀与制动蓄能器ⅰ之间引出油路与压力表ⅱ连接。
13.本实用新型具有如下的有益效果:
14.本实用新型是一种以物联网、自动化装备相结合的煤矿无轨辅助运输机器人的线控制动系统,为智能远程操控煤矿无轨辅助运输机器人的安全制动系统提供了一种可行性方案,可以实现煤矿无轨辅助运输机器人制动系统的人员驾驶控制和线控自动控制模式,实现了煤矿无轨辅助运输机器人的人机交互式线控制动。
附图说明
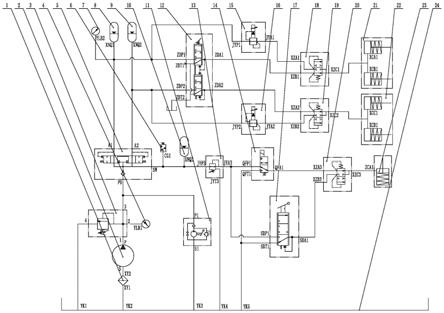
15.图1为煤矿无轨辅助运输机器人的人机交互式线控制动系统的原理图。
16.其中,附图标记对应的名称为:
[0017]1‑
吸油过滤器,2
‑
液压泵,3
‑
安全阀组,4
‑
压力表ⅰ,5
‑
双路充液阀,6
‑
低压报警开关,7
‑
压力表ⅱ,8
‑
制动蓄能器ⅰ,9
‑
制动蓄能器ⅱ,10
‑
制动蓄能器ⅲ,11
‑
手压泵,12
‑
脚踏制动阀,13
‑
减压阀,14
‑
驻车常开球阀,15
‑
电控比例减压阀ⅰ,16
‑
电控比例减压阀ⅱ,17
‑
手动制动阀,18
‑
液控压力自适应选择阀ⅰ,19
‑
液控压力自适应选择阀ⅱ,20
‑
液控压力自适应选择阀ⅲ,21
‑
前桥轮边制动器,22
‑
后桥轮边制动器,23
‑
驻车制动器,24
‑
液压油箱。
具体实施方式
[0018]
下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0019]
本实施例提供一种煤矿无轨辅助运输机器人的人机交互式线控制动系统,包括:吸油过滤器1,液压泵2,安全阀组3,压力表ⅰ4,双路充液阀5,低压报警开关6,压力表ⅱ7,制动蓄能器ⅰ8,制动蓄能器ⅱ9,制动蓄能器ⅲ10,手压泵11,脚踏制动阀12,减压阀13,驻车常开球阀14,电控比例减压阀ⅰ15,电控比例减压阀ⅱ16,手动制动阀17,液控压力自适应选择阀ⅰ18,液控压力自适应选择阀ⅱ19,液控压力自适应选择阀ⅲ20,前桥轮边制动器21,后桥轮边制动器22,驻车制动器23,液压油箱24。其中,脚踏制动阀12,减压阀13,驻车常开球阀14,电控比例减压阀ⅰ15,电控比例减压阀ⅱ16,手动制动阀17,液控压力自适应选择阀ⅰ18,液控压力自适应选择阀ⅱ19,液控压力自适应选择阀ⅲ20中以三位字母和数字的组合表示阀的油口,前两位字母代表该阀的名称,第三位字母为p、t分别代表进油口和回油口,a、b、c均代表工作油口。
[0020]
吸油过滤器1的进油口(xy1口)通过液压胶管连接液压油箱24的yk2口,吸油过滤器的出油口(xy2口)通过液压胶管连接液压泵2的s口,液压泵2的p口通过液压胶管连接安全阀组3的1口,安全阀组3的2口通过测压软管连接压力表ⅰ4的接口(ylb1口),安全阀组3的3口通过液压胶管分别连接手压泵11的p1口和双路充液阀5的p0口,手压泵11的s1口通过液压胶管连接液压油箱24的yk3口,安全阀组3的4口通过液压胶管连接液压油箱24的yk1口,双路充液阀5的a1口通过液压胶管连接制动蓄能器ⅰ8的接口(xnq1口),双路充液阀5和制动蓄能器ⅰ8之间通过测压软管连接压力表ⅱ7的接口(ylb2口),双路充液阀5和制动蓄能器ⅰ8之间通过三通接头和液压胶管连接脚踏制动阀12的zdp1口和电控比例减压阀ⅰ15的jyp1口,双路充液阀的a2口通过液压胶管连接制动蓄能器ⅱ9的接口(xnq2口),双路充液阀5和制动蓄能器ⅱ9之间通过三通接头和液压胶管连接脚踏制动阀12的zdp2口和电控比例减压阀ⅱ16的jyp2口,双路充液阀5的sw口连接低压报警开关6的接口(cg1口),脚踏制动阀12的zdt1口用堵头堵住,脚踏制动阀12的zdt2口通过液压胶管连接到液压油箱,脚踏制动阀12的zda1、zda2口通过液压胶管分别连接液控压力自适应选择阀ⅰ18的xzb1口和液控压力自适应选择阀ⅱ19的xza2口,电控比例减压阀ⅰ15的jya1口和电控比例减压阀ⅱ16的jya2口通过液压胶管分别连接液控压力自适应选择阀ⅰ18的xza1口和液控压力自适应选择阀ⅱ19的xzb2口,液控压力自适应选择阀ⅰ18的xzc1口通过液压胶管连接前桥轮边制动器21中对应两侧轮胎的接口(xca1口和xcb1口),液控压力自适应选择阀ⅱ19的xzc2口通过液压胶管连接后桥轮边制动器22中对应两侧轮胎的接口(xcc1口和xcd1口),
[0021]
低压报警开关6的cg1口通过三通接头和液压胶管分别连接制动蓄能器ⅲ10的接口(xnq3口)和减压阀13的jyp3口,减压阀13的jyt3口通过液压胶管连接液压油箱24的yk4口,减压阀13的jya3口通过三通接头和液压胶管分别连接驻车常开球阀14的qfp1口和手动制动阀17的sdp1口,驻车常开球阀14的qft1口和手动制动阀17的sdt1口通过三通接头和液压胶管连接液压油箱24的yk5口,驻车常开球阀14的qfa1口通过液压胶管连接液控压力自适应选择阀ⅲ20的xza3口,手动制动阀17的sda1口通过液压胶管连接液控压力自适应选择阀ⅲ20的xzb3口,液控压力自适应选择阀ⅲ20的xzc3口通过液压胶管连接驻车制动器23的接口(zca1口)。
[0022]
上述人机交互式线控制动系统工作过程如下所述。
[0023]
煤矿无轨辅助运输机器人通电启动后,防爆柴油机工作带动液压泵2转动,液压泵2的s口在虹吸的作用下将液压油从液压油箱24的油口yk2口经过吸油过滤器1的xy1口、xy2口,再到液压泵2的s口,产生的高压液压油从液压泵2的p口到达安全阀组3的1口,第一路到达安全阀组3的2口,显示液压泵2的出口p口压力,第二路经过安全阀组3的3口达到双路充液阀5的p0口,在双路充液阀5的作用下开始给制动蓄能器ⅰ8、制动蓄能器ⅱ9、制动蓄能器ⅲ10进行充液直至到达充液上线,当制动蓄能器ⅰ8、制动蓄能器ⅱ9、制动蓄能器ⅲ10低于设定压力时低压报警开关6开始报警提示需要及时进行充液,压力表ⅱ7的ylb2口连接制动蓄能器ⅰ8的xnq1口,显示制动蓄能器此时的压力情况,当经过安全阀组3的油压高于安全值,安全阀组3中的安全阀打开,进行降压。
[0024]
(1)当煤矿无轨辅助运输机器人准备行驶时,需要解除驻车制动,可采用两种方法。
[0025]
方法ⅰ:驻车常开球阀14通电换向,制动蓄能器ⅲ10中的高压液压油从xnq3口流出经过减压阀13的jyp3口、jya3口进行减压到设定压力值之后,减压后的液压油经过驻车常开球阀14的qfp1口到达qfa1口,再到达液控压力自适应选择阀ⅲ20的xza3口,液控压力自适应选择阀ⅲ20的xza3口与xzb3口进行比较,xza3口处油压高于xzb3口油压,此时液控压力自适应选择阀ⅲ20的xza3口和xzc3口相通,高压液压油经过液控压力自适应选择阀ⅲ20的xzc3口到达驻车制动器23的zca1口,安全型的驻车制动器(弹簧制动、液压释放)在高压液压油的作用下解除制动,此时,实现线控煤矿无轨辅助运输机器人解除驻车制动功能。
[0026]
方法ⅱ:制动蓄能器ⅲ10中的高压液压油从xnq3口流出经过减压阀13的jyp3口、jya3口进行减压到设定压力值之后,减压后的液压油经过手动制动阀17的sdp1口,驾驶员手动压下操作手动制动阀17的手柄使阀换向,手动制动阀17的sdp1口与sda1相通,高压液压油到达液控压力自适应选择阀ⅲ20的xzb3口,液控压力自适应选择阀ⅲ20的xza3口与xzb3口进行比较,xzb3口处油压高于xza3口油压,此时液控压力自适应选择阀ⅲ20的xzb3口和xzc3口相通,高压液压油经过液控压力自适应选择阀ⅲ20的xzc3口到达驻车制动器23的zca1口,安全型的驻车制动器(弹簧制动、液压释放)在高压液压油的作用下解除制动。
[0027]
(2)当煤矿无轨辅助运输机器人停车需要驻车制动时,可采用两种方法。
[0028]
方法ⅰ:驻车常开球阀14断电换向,使驻车常开球阀14的qfa1口与qft1口相通,驻车常开球阀14的qft1口与液压油箱24的yk5口相通,驻车制动器23的高压液压油在弹簧力的作用下,从驻车制动器23的zca1口流向液控压力自适应选择阀ⅲ20的xzc3口,再经过液控压力自适应选择阀ⅲ20的xza3口到达驻车常开球阀14的qfa1口、qft1口,通过液压油箱
24的yk5口回到液压油箱24,安全型的驻车制动器(弹簧制动、液压释放)在弹簧的作用下车辆制动,此时,实现线控煤矿无轨辅助运输机器人驻车制动功能。
[0029]
方法ⅱ:驾驶员手动提起操作手动制动阀17的手柄使阀换向,使手动制动阀17的油口sda1口与sdt1口相通,手动制动阀17的sdt1口与液压油箱24的yk5口相通,驻车制动器23的高压液压油在弹簧力的作用下,从驻车制动器23的zca1口流向液控压力自适应选择阀ⅲ20的xzc3口,再经过液控压力自适应选择阀ⅲ20的xzb3口到达手动制动阀17的sda1口、sdt1口,通过液压油箱24的yk5口回到液压油箱24,安全型的驻车制动器(弹簧制动、液压释放)在弹簧的作用下车辆制动。
[0030]
(3)当煤矿无轨辅助运输机器人需要行车减速或者制动时,可采用两种方法。车桥轮边行车制动器是给油型制动器(液压制动、弹簧释放)。
[0031]
方法ⅰ:电控比例减压阀ⅰ15、电控比例减压阀ⅱ16通电,使电控比例减压阀ⅰ15油口jyp1口和jya1口相通,使电控比例减压阀ⅱ16油口jyp2口和jya2口相通,两路高压液压油分别经过电控比例减压阀ⅰ15、电控比例减压阀ⅱ16根据设定的压力值进行减压;一路减压后的高压液压油从电控比例减压阀ⅰ15的油口jyp1口、jya1口到达液控压力自适应选择阀ⅰ18的xza1口,液控压力自适应选择阀ⅰ18的xza1口与xzb1口进行比较,xza1口处油压高于xzb1口油压,此时液控压力自适应选择阀ⅰ18的xza1口和xzc1口相通,高压液压油经过液控压力自适应选择阀ⅰ18的xzc1口到达前桥轮边制动器21的xca1口、xcb1口,高压液压油克服弹簧力实现前桥轮边制动;同时,另一路减压后的高压液压油从电控比例减压阀ⅱ16的油口jyp2口、jya2口到达液控压力自适应选择阀ⅱ19的xzb2口,经过液控压力自适应选择阀ⅱ19的xza2口与xzb2口进行比较,xzb2口处油压高于xza2口油压,此时液控压力自适应选择阀ⅱ19的xzb2口和xzc2口相通,高压液压油经过液控压力自适应选择阀ⅱ19的xzc2口到达后桥轮边制动器22的xcc1口、xcd1口,高压液压油克服弹簧力实现后桥轮边制动;此时,实现线控煤矿无轨辅助运输机器人行车减速或者制动功能。
[0032]
方法ⅱ:驾驶员脚踏下脚踏制动阀12的制动踏板,根据制动踏板踏下的角度使脚踏制动阀12zdp1口和zda1口、zdp2口和zda2口线性比例式相通;一路高压油从制动蓄能器ⅰ8的xnq1口到达脚踏制动阀12的zdp1口,减压后从脚踏制动阀12的zda1口到达液控压力自适应选择阀ⅰ18的xzb1口,液控压力自适应选择阀ⅰ18的xza1口与xzb1口进行比较,xzb1口处油压高于xza1口油压,此时液控压力自适应选择阀ⅰ18的xzb1口和xzc1口相通,高压液压油经过液控压力自适应选择阀ⅰ18的xzc1口到达前桥轮边制动器21的xca1口、xcb1口,高压液压油克服弹簧力实现前桥轮边制动;同时,另一路高压油从制动蓄能器ⅱ9的xnq2口到达脚踏制动阀12的zdp2口,减压后从脚踏制动阀12的zda2口到达液控压力自适应选择阀ⅱ19的xza2口,液控压力自适应选择阀ⅱ19的xza2口与xzb2口进行比较,xza2口处油压高于xzb2口油压,此时液控压力自适应选择阀ⅱ19的xza2口和xzc2口相通,高压液压油经过液控压力自适应选择阀ⅱ19的xzc2口到达后桥轮边制动器22的xcc1口、xcd1口,高压液压油克服弹簧力实现后桥轮边制动。
[0033]
当液压泵2出现故障无法使用时,采用手压泵11泵送液压油。
[0034]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部
技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
