1.本发明属于自动驾驶技术领域,具体涉及自动驾驶进入匝道的控制系统、方法、车辆及存储介质。
背景技术:
2.驾驶辅助技术发展迅速已经逐渐成为目前中高端车型的标配,驾驶辅助系统目前除了已普及的l2级别功能车道对中功能,后续的发展方向之一是提升场景连贯性,通过自主换道和自主进出匝道实现高速公路点对点全自动驾驶即导航辅助驾驶。目前导航辅助驾驶的主流方案是使用高精度地图和高精度定位系统,如专利文献cn109664888a公开的高速功能自动切换系统、高级驾驶辅助系统及高速功能自动切换方法,该方法中提出使用高精地图系统融合传感信息进行匝道区域判断,该方法需使用高精地图和定位。其缺点是成本较高且需要高精度地图覆盖区域才能使用,且高精定位系统也存在失效场景。
3.因此,有必要开发一种新的自动驾驶进入匝道的控制系统、方法、车辆及存储介质及车辆。
技术实现要素:
4.本发明的目的是提供一种自动驾驶进入匝道的控制系统、方法、车辆及存储介质,能确保进入匝道过程的安全性,且不需要高精度地图和定位。
5.第一方面,本发明所述的一种自动驾驶进入匝道的控制方法,包括以下步骤:步骤1,进入匝道条件判断,判断导航路径以及本车状态是否满足自动进入匝道条件,若满足,则进入步骤2,否则,继续执行步骤1;步骤2,匝道区域场景重构,通过摄像头进行车道线识别,要求摄像头至少识别到主路右侧车道线和匝道右侧车道线,并通过计算主路右侧车道线和匝道右侧车道线的起始相交点得到匝道的起始点,并将主路右侧车道线作为匝道的左边界线,将匝道右侧车道线作为匝道的右边界线,并进行轨迹规划进入匝道;在摄像头检测到匝道左侧车道线时,将匝道左侧车道线与主路右侧车道线的相交点作为该匝道入口的终点,此时匝道的右边界保持跟踪匝道右侧车道线,匝道左边界更新为主路右侧车道线和匝道左侧车道线两条车道线的组合;步骤3,匝道可通行状态确认,从雷达原始点云以及摄像头的可通行区域分割点云中,提取出表征道路边界护栏的点,判断是否重构出的匝道区域是否是可通行状态,作为安全校验;若匝道口判断为不可通行,则提示驾驶员接管车辆;若匝道口判断为可通行,进入步骤4;步骤4,匝道区域路径规划,根据导航信息进入匝道后靠左侧或靠右侧行驶,对应选择匝道的左、右侧边界作为规划的参考线进行轨迹规划,生成三次多项式曲线方程;步骤5,轨迹有效性判断,判断生成的三次多项式曲线方程是否为控制可跟随,是否与其他目标存在碰撞风险,若为控制可跟随且与其他目标不存在碰撞风险,则认为轨迹
有效,将轨迹给到控制器控制车辆进入匝道,否则认为轨迹无效,则提示驾驶员接管车辆。
6.可选地,所述步骤1中,条件包括:条件1a.本车处于导航辅助驾驶状态,即已开启响应驾驶辅助功能且已设置导航目的地;条件1b.本车位于导航辅助驾驶可用的电子围栏区域内;条件1c.本车处于进入匝道判定区域,导航路径提示还有预设距离进入匝道;条件1d.本车处于匝道相邻的车道;条件1f.本车速度处于可进入匝道的速度区间;若以上条件均满足,则进入步骤2,否则,继续执行步骤1。
7.可选地,当距离匝道入口终点过近,判断已无法规划有效轨迹时,保持在当前车道行驶且同时提示驾驶员接管。
8.可选地,所述预设距离为50m。
9.第二方面,本发明所述的一种自动驾驶进入匝道的控制系统,包括卫星定位模块、导航地图模块、摄像头模块、毫米波雷达模块、控制器和存储器;所述卫星定位模块用于提供车辆的定位信息,定位精度为米级;所述导航地图模块用于结合卫星定位模块给出前方匝道起点距离,以及进入匝道后靠左或靠右侧行驶的路径信息;所述摄像头模块用于输出当前车道和相邻车道的车道线曲线方程、前方目标信息以及前方可通行区域点;所述毫米波雷达模块用于输出车辆目标信息,以及雷达反射点数据;所述存储器内存储有计算机可读程序;所述控制器调用所述计算机可读程序时,能执行如本发明所述的自动驾驶进入匝道的控制方法的步骤。
10.可选地,所述摄像头模块为前视摄像头。
11.可选地,所述毫米波雷达模块包括前向长距毫米波雷达和侧向中距毫米波雷达。
12.可选地,所述导航地图模块为车道导航地图,用于提供导航路径和匝道信息。
13.第三方面,本发明所述的一种车辆,采用如本发明所述的自动驾驶进入匝道的控制系统。
14.第四方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时,能执行如本发明所述的自动驾驶进入匝道的方法的步骤。
15.本发明具有以下优点:本发明充分运用目前主流驾驶辅助传感器信息,通过摄像头检测车道线信息,重构匝道入口场景,并结合雷达护栏点检测以及摄像头可通行区域结果判断碰撞风险,提升了进入匝道过程的安全性。由于不需要高精地图和高精度定位,故成本较低。
附图说明
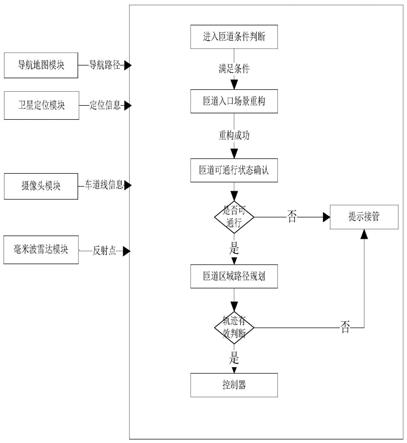
16.图1为本实施例的流程图;图2为本实施例中原理示意图;图3为本实施例的原理框图。
具体实施方式
17.如图1所示,本实施例中,一种自动驾驶进入匝道的控制方法,具体包括以下步骤:步骤1,进入匝道条件判断,其中条件包括:条件1a.本车处于导航辅助驾驶状态,即已开启响应驾驶辅助功能且已设置导航目的地;条件1b.本车位于导航辅助驾驶可用的电子围栏区域内;条件1c.本车处于进入匝道判定区域,导航路径提示还有50m进入匝道;条件1d.本车处于匝道相邻的车道;条件1f.本车速度处于可进入匝道的速度区间;若以上条件均满足,则进入步骤2,否则继续执行步骤1。
18.步骤2,匝道区域场景重构,车辆1通过摄像头进行车道线识别,要求摄像头至少识别到主路右侧车道线6,匝道右侧车道线4,参见图2;并通过计算主路右侧车道线6和匝道右侧车道线4的起始相交点得到匝道的起始点2;并将主路右侧车道线6作为匝道的左边界线,将匝道右侧车道线4作为匝道的右边界线,并进行轨迹规划进入匝道;若摄像头检测到匝道左侧车道线5,将匝道左侧车道线5与主路右侧车道线6的相交点3作为该匝道入口的终点,此时匝道的右边界保持跟踪匝道右侧车道线4,匝道左边界更新为主路右侧车道线6和匝道左侧车道线5两条车道线的组合。
19.步骤3,匝道可通行状态确认,上述步骤中已经重构出匝道的起点,左、右侧边界,从雷达原始点云以及摄像头的可通行区域分割点云中,提取出表征道路边界护栏的点7,参见图2,判断是否重构出的匝道区域是否是可通行状态,作为安全校验;若匝道口判断为不可通行,则提示驾驶员接管车辆;若匝道口判断为可通行,进入步骤4。
20.步骤4,匝道区域路径规划,根据导航信息进入匝道后靠左侧或靠右侧行驶,对应选择匝道的左、右侧边界作为规划的参考线进行轨迹规划,生成三次多项式曲线方程。比如:导航信息为进入匝道后靠左侧行驶,则选择匝道左侧边界作为规划的参考线,设置合理的控制点,轨迹规划生成三次多项式曲线方程,即得到靠左行驶轨迹9,参见图2。导航信息为进入匝道后靠右侧行驶,则选择匝道右侧边界作为规划的参考线,设置合理的控制点,轨迹规划生成三次多项式曲线方程,即得到靠右行驶轨迹8,参见图2。
21.步骤5,轨迹有效性判断,判断生成的三次多项式曲线是否为控制可跟随,是否与其他目标存在碰撞风险,若为控制可跟随且与其他目标不存在碰撞风险,则认为轨迹有效,将轨迹给到控制器控制车辆进入匝道,否则认为轨迹无效,则提示驾驶员接管车辆。
22.本实施例中,当距离匝道入口终点过近,判断已无法规划有效轨迹时,保持在当前车道行驶且同时提示驾驶员接管。
23.如图3所示,本实施例中,一种自动驾驶进入匝道的控制系统,包括卫星定位模块、导航地图模块、摄像头模块、毫米波雷达、控制器和存储器;所述控制器分别与卫星定位模块、导航地图模块、摄像头模块、毫米波雷达和存储器连接。所述卫星定位模块用于提供车辆的定位信息,定位精度为米级。所述导航地图模块用于结合卫星定位模块给出前方匝道起点距离,以及进入匝道后靠左或靠右侧行驶的路径信息。所述摄像头用于输出当前车道和相邻车道的车道线曲线方程、前方目标信息以及前方可通行区域点。所述毫米波雷达用于输出车辆目标信息,以及雷达反射点数据。所述存储器内存储有计算机可读程序。所述控
制器调用所述计算机可读程序时,能执行如本实施例中所述的自动驾驶进入匝道的控制方法的步骤。
24.本实施例中,所述卫星定位模块用于提供车辆的定位信息,定位精度为米级,故本系统和方法对卫星定位模块的精度要求不高,可以节约成本。
25.本实施例中,所述导航地图模块用于结合卫星定位模块给出前方匝道起点距离,以及进入匝道后靠左或靠右侧行驶的路径信息;故本系统和方法对导航地图模块的精度要求不高,可以节约成本。
26.本实施例中,所述摄像头用于输出当前车道和相邻车道的车道线曲线方程、前方目标信息以及前方可通行区域点。所述毫米波雷达用于输出车辆目标信息,以及雷达反射点数据。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
