1.本发明涉及水下机器人技术领域,特别涉及一种紧急悬浮装置。
背景技术:
2.水下机器人,或叫遥控无人潜水器,是一种利用自身搭载的仪器设备在水下进行人为操纵作业的潜水设备,rov是目前世界上使用最为广泛的潜水器,在海洋工程和军事等领域发挥着重要的作用。传统的rov存在作业能力相对较低、机动性差、视频传输的路数和传输距离受到限制、人机交互能力和可扩展性差等诸多方面问题,不能满足当今海洋、军事等相关行业或部门对rov的需求。
3.目前,现有的海底声呐机器人在使用时,由于需要将机器人放置到海底,且为了机器人能够在出现异常情况下迅速上浮,因此需要在机器人的外部安装漂浮装置,但是现有的漂浮装置采用如汽车防撞气囊形式,例如现有专利技术cn111252223a,cn105083506a中均是利用在紧急情况时气囊的自动弹开来实现临时上浮,但是上述装置均存在下述已有技术缺陷:1、在发生异常时,迅速膨胀,向上漂浮,在机器人漂浮的过程中,由于气囊突然膨胀,因此海水对气囊的浮力也是突然施加在气囊上,而此时机器人处于匀速或是静止的状态,因此在运动状态突然转变的过程中,漂浮装置和机器人连接处会发生断裂或时变形,导致装置发生损毁,影响资源的合理利用;2、现有的可充气气囊结构一般为固定式和吸盘的可拆卸式,但是固定式的不便于拆卸的同时也不便于气囊的更换,吸盘式的容易发生误操作且在气囊急剧膨胀过程中容易与设备脱离;3、此外现有的部分水下设备在上浮过程中需要保持在上浮过程中的特定姿态,例如倾斜姿态,而现有的倾斜姿态一般需要利用在水下设备外壳上的多个方位设置的螺旋桨综合调向完成,调整效率较低。
技术实现要素:
4.本发明的目的是:提供一种海底声呐机器人用紧急悬浮装置,可以有效解决背景技术中的问题。
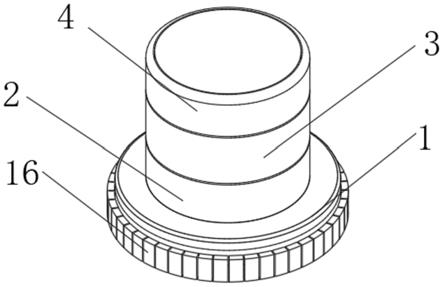
5.本发明的技术方案是:一种海底声呐机器人用紧急悬浮装置,包括:连接底座,其顶部由下到上依次连接有呈圆筒状的支撑筒、连接环和顶盖,并在连接环和顶盖之间连接波纹管,且连接环和支撑筒之间设置有折叠放置的气囊套,该气囊套位于低压区内。
6.缓升机构,其包含安装在顶盖内顶面的一号自锁电机以及安装在连接环内壁的安装座,且一号自锁电机输出轴上安装的一号丝杆与安装在安装座中心处的螺纹筒螺纹连接,且顶盖与连接环之间设置气囊,所述安装座的内部安装有用于检测支撑筒和连接环之间气压的气压传感器。
7.急升机构,其包含安装在安装座底部的二号自锁电机以及安装在二号自锁电机输出轴上的二号丝杆,且二号丝杆与支撑筒顶部的螺纹筒螺纹连接,所述支撑筒的内部设置有用于分隔空间的隔板,并在隔板内部设置用于空气连通的电磁阀,且支撑筒的内底面安装有气体发生器,所述隔板将支撑筒内部空间分割为高压区和低压区,且气体发生器安装
在高压区,并在气体发生器的一侧设置点火器,所述支撑筒的内底面采用挠性薄壁材质,在支撑筒的外底面一体成型有多圈同心但不同高度的挠性肋,该挠性肋肋体的底部扁平化打毛处理,每圈挠性肋肋体的底部预贴附在真空吸盘本体的顶部。
8.所述连接底座的底部中心处连接有真空吸盘,该真空吸盘的顶部预贴附固定在所述支撑筒的外底面上,并在连接底座的外边缘位置等间距设置多组挤压杆,且连接在挤压杆朝向连接底座一侧的延伸板与开设在连接底座外部的凹槽之间弹簧连接,所述连接底座的外壁设置呈“t”形的凸起,并与开设在挤压杆内侧滑槽滑动连接,所述挤压杆与真空吸盘的边缘位置对应,且挤压杆的底部粘接有呈半球形的橡胶凸起。
9.在海底声呐机器人的不同方位处设置有多个悬浮装置,每个悬浮装置内的点火器、气压传感器、一号自锁电机、二号自锁电机、电磁阀均连接到位于该悬浮装置内的无线收发器总成,多个悬浮装置内的多个无线收发器总成接收海底声呐机器人内的第二微控制器的无线控制信号,使得多个悬浮装置能够分时或者同步工作于缓升/急升两种模式,且每个悬浮装置在每种模式下的缓升或者急升速率可以独立控制。
10.所述螺纹筒设置有两组,且分别安装在连接环和支撑筒的中心处。
11.所述一号自锁电机通过导线与安装在顶盖内部的一号副电池电性连接。
12.所述二号自锁电机和气压传感器均通过导线与安装在安装座内部的二号副电池电性连接。
13.所述电磁阀和点火器均通过导线与安装在支撑筒内部的主电池电性连接,且安装在支撑筒、连接环和顶盖内部的无线收发器总成之间无线连接。
14.有益效果:
15.1、本发明通过在顶盖和连接环之间设置丝杆传动,能够根据需要自由调节顶盖和连接环之间波纹管形成体积,方便机器人缓慢上移,避免快速上移而发生损坏等情况。
16.2、本发明通过在高压区的内部设置气体发生器,并在隔板上设置电磁阀,能够根据需要自由调节气囊套的膨胀程度,从而进行快速漂浮。
17.3、本发明通过在连接底座的底部设置真空吸盘,方便将装置吸附在机器人的外部,同时通过在连接底座的外部设置挤压杆,能够对真空吸盘的边缘进行挤压固定,避免真空吸盘的边缘发生碰撞或是损坏。
18.4、本发明高低压区的设置使得能够进行气囊充气的同时使得吸盘的吸附效果大大增加。
19.5、本发明中多个不同方位设置的多个悬浮装置的独立操作使得可以在上浮或者其他作业工作过程中辅助完成机器人的不同姿态调整。
附图说明
20.图1为本发明的整体结构图;
21.图2为本发明中波纹管伸长结构图;
22.图3为本发明中气囊套膨胀结构图;
23.图4为本发明中连接环和顶盖的截面图;
24.图5为本发明中支撑筒和连接环的截面图;
25.图6为本发明的仰视图。
26.图中:1
‑
连接底座;2
‑
支撑筒;3
‑
连接环;4
‑
顶盖;5
‑
波纹管;6
‑
一号自锁电机;7
‑
一号丝杆;8
‑
安装座;9
‑
螺纹筒;10
‑
气压传感器;11
‑
二号自锁电机;12
‑
二号丝杆;13
‑
电磁阀;14
‑
气囊套;15
‑
延伸板;16
‑
挤压杆。
具体实施方式
27.实施例1,参照图1
‑
6所示,一种海底声呐机器人用紧急悬浮装置,包括:连接底座1,其顶部由下到上依次连接有呈圆筒状的支撑筒2、连接环3和顶盖4,并在连接环3和顶盖4之间连接波纹管5,且连接环3和支撑筒2之间设置有折叠放置的气囊套14,该气囊套14位于低压区内。
28.缓升机构,其包含安装在顶盖4内顶面的一号自锁电机6以及安装在连接环3内壁的安装座8,且一号自锁电机6输出轴上安装的一号丝杆7与安装在安装座8中心处的螺纹筒9螺纹连接,且顶盖4与连接环3之间设置气囊,所述安装座8的内部安装有用于检测支撑筒2和连接环3之间气压的气压传感器10。
29.急升机构,其包含安装在安装座8底部的二号自锁电机11以及安装在二号自锁电机11输出轴上的二号丝杆12,且二号丝杆12与支撑筒2顶部的螺纹筒9螺纹连接,所述支撑筒2的内部设置有用于分隔空间的隔板,并在隔板内部设置用于空气连通的电磁阀13,且支撑筒2的内底面安装有气体发生器,所述隔板将支撑筒2内部空间分割为高压区和低压区,且气体发生器安装在高压区,并在气体发生器的一侧设置点火器,所述支撑筒2的内底面采用挠性薄壁材质,在支撑筒2的外底面一体成型有多圈同心但不同高度的挠性肋,该挠性肋肋体的底部扁平化打毛处理,每圈挠性肋肋体的底部预贴附在真空吸盘本体的顶部,但是挠性肋肋体的底部与真空吸盘仅仅是预贴附,并不是固定连接在一起。
30.所述连接底座1的底部中心处连接有真空吸盘,该真空吸盘的顶部预贴附固定在所述支撑筒2的外底面上,并在连接底座1的外边缘位置等间距设置多组挤压杆16,且连接在挤压杆16朝向连接底座1一侧的延伸板15与开设在连接底座1外部的凹槽之间弹簧连接,所述连接底座1的外壁设置呈“t”形的凸起,并与开设在挤压杆16内侧滑槽滑动连接,所述挤压杆16与真空吸盘的边缘位置对应,且挤压杆16的底部粘接有呈半球形的橡胶凸起。
31.在海底声呐机器人的不同方位处设置有多个悬浮装置,每个悬浮装置内的点火器、气压传感器、一号自锁电机6、二号自锁电机11、电磁阀13均连接到位于该悬浮装置内的无线收发器总成,多个悬浮装置内的多个无线收发器总成接收海底声呐机器人内的第二微控制器的无线控制信号,使得多个悬浮装置能够分时或者同步工作于缓升/急升两种模式,且每个悬浮装置在每种模式下的缓升或者急升速率可以独立控制。
32.通过在挤压杆16内侧的延伸板15与连接底座1的边缘位置设置弹簧,能够在连接底座1与机器人的外壁连接完成后,连接底座1外部的挤压杆16向机器人的外部方向挤压,从而将连接底座1和机器人外壁之间的间隙堵住,防止外部物体碰撞或误触真空吸盘的边缘,从而提高真空吸盘使用时的安全性。
33.参照图1和图6所示,连接底座1的外壁设置呈“t”形的凸起,并与开设在挤压杆16内侧滑槽滑动连接。
34.通过在连接底座1外部设置呈“t”形的凸起,并在挤压杆16内侧设置滑槽,使得挤压杆16只能上下滑动。
35.参照图5和图6所示,挤压杆16与真空吸盘的边缘位置对应,且挤压杆16的底部粘接有呈半球形的橡胶凸起。
36.通过将挤压杆16设置在靠近真空吸盘的边缘位置,能够对真空吸盘的边缘进行挤压固定,其次,通过将挤压杆16的一端设计呈半球形,避免损坏真空吸盘的边缘。
37.参照图4所示,安装座8的内部安装有用于检测支撑筒2和连接环3之间气压的气压传感器10。
38.通过在支撑筒2和连接环3之间设置气压传感器10,能够检测支撑筒2和连接环3之间的压力是否稳定,方便及时进行修理与更换。
39.参照图4和图5所示,螺纹筒9设置有两组,且分别安装在连接环3和支撑筒2的中心处。
40.通过设置两组螺纹筒9,并分别安装在连接环3和支撑筒2的中心处,能够调节支撑筒2和连接环3之间的间距,以及连接环3和顶盖4之间的间距。
41.参照图5所示,隔板将支撑筒2内部空间分割为高压区和低压区,且气体发生器安装在高压区,并在气体发生器的一侧设置点火器。
42.通过在气体发生器的一侧设置点火器,能够加速气体发生器内部物质的反应。
43.参照图4所示,一号自锁电机6通过导线与安装在顶盖4内部的一号副电池电性连接。
44.顶盖4内的一号副电池为位于一号自锁电机6供电。
45.参照图4所示,二号自锁电机11和气压传感器10均通过导线与安装在安装座8内部的二号副电池电性连接。
46.安装座8内的二号副电池为位于二号自锁电机11供电。
47.参照图5所示,电磁阀13和点火器均通过导线与安装在支撑筒2内部的主电池电性连接,且安装在支撑筒2、连接环3和顶盖4内部的无线收发器总成之间无线连接。
48.通过在支撑筒2、连接环3和顶盖4的内部设置无线收发器总成,使得支撑筒2、连接环3和顶盖4之间进行无线通讯。
49.安装时,通过连接底座1底部的真空吸盘与机器人的外壁连接,连接完成后,由于挤压杆16内侧的延伸板15与连接底座1的边缘位置通过弹簧连接,因此在连接底座1与机器人的外壁连接完成后,连接底座1外部的挤压杆16向机器人的外部方向挤压,从而将连接底座1和机器人外壁之间的间隙堵住,防止外部物体碰撞或误触真空吸盘的边缘,从而提高真空吸盘使用时的安全性。
50.当需要缓慢升降时,通过控制顶盖4的底部的一号自锁电机6调动一号丝杆7旋转,由于一号丝杆7与安装在安装座8中心处的螺纹筒9螺纹连接,因此在一号丝杆7旋转时,能够调整一号丝杆7伸出螺纹筒9的长度,即控制顶盖4和连接环3之间的间距,由于顶盖4和连接环3之间存储有高压气体,且高压气体通过顶盖4和连接环3之间波纹管5限制,因此在顶盖4和连接环3之间间距增大时,装置体积增大,从而增加机器人的整体体积,使得机器人的排水量增大和浮力增大,又由于顶盖4和连接环3之间的间距可以通过一号自锁电机6控制,因此能够控制装置的膨胀程度以及膨胀速度,由此来控制机器人的浮力,提高装置使用的安全性,避免快速上移而发生损坏等情况,形成如图3所示形状。
51.实施例2,参照图1
‑
6所示,一种海底声呐机器人用紧急悬浮装置,包括:连接底座
1,其顶部由下到上依次连接有呈圆筒状的支撑筒2、连接环3和顶盖4,并在连接环3和顶盖4之间连接波纹管5,且连接环3和支撑筒2之间设置有折叠放置的气囊套14,该气囊套14位于低压区内。
52.缓升机构,其包含安装在顶盖4内顶面的一号自锁电机6以及安装在连接环3内壁的安装座8,且一号自锁电机6输出轴上安装的一号丝杆7与安装在安装座8中心处的螺纹筒9螺纹连接,且顶盖4与连接环3之间设置气囊,所述安装座8的内部安装有用于检测支撑筒2和连接环3之间气压的气压传感器10。
53.急升机构,其包含安装在安装座8底部的二号自锁电机11以及安装在二号自锁电机11输出轴上的二号丝杆12,且二号丝杆12与支撑筒2顶部的螺纹筒9螺纹连接,所述支撑筒2的内部设置有用于分隔空间的隔板,并在隔板内部设置用于空气连通的电磁阀13,且支撑筒2的内底面安装有气体发生器,所述隔板将支撑筒2内部空间分割为高压区和低压区,且气体发生器安装在高压区,并在气体发生器的一侧设置点火器,所述支撑筒2的内底面采用挠性薄壁材质,在支撑筒2的外底面一体成型有多圈同心但不同高度的挠性肋,该挠性肋肋体的底部扁平化打毛处理,每圈挠性肋肋体的底部预贴附在真空吸盘本体的顶部。
54.所述连接底座1的底部中心处连接有真空吸盘,该真空吸盘的顶部预贴附固定在所述支撑筒2的外底面上,并在连接底座1的外边缘位置等间距设置多组挤压杆16,且连接在挤压杆16朝向连接底座1一侧的延伸板15与开设在连接底座1外部的凹槽之间弹簧连接,所述连接底座1的外壁设置呈“t”形的凸起,并与开设在挤压杆16内侧滑槽滑动连接,所述挤压杆16与真空吸盘的边缘位置对应,且挤压杆16的底部粘接有呈半球形的橡胶凸起。
55.在海底声呐机器人的不同方位处设置有多个悬浮装置,每个悬浮装置内的点火器、气压传感器、一号自锁电机6、二号自锁电机11、电磁阀13均连接到位于该悬浮装置内的无线收发器总成,多个悬浮装置内的多个无线收发器总成接收海底声呐机器人内的第二微控制器的无线控制信号,使得多个悬浮装置能够分时或者同步工作于缓升/急升两种模式,且每个悬浮装置在每种模式下的缓升或者急升速率可以独立控制。
56.通过在挤压杆16内侧的延伸板15与连接底座1的边缘位置设置弹簧,能够在连接底座1与机器人的外壁连接完成后,连接底座1外部的挤压杆16向机器人的外部方向挤压,从而将连接底座1和机器人外壁之间的间隙堵住,防止外部物体碰撞或误触真空吸盘的边缘,从而提高真空吸盘使用时的安全性。
57.参照图1和图6所示,连接底座1的外壁设置呈“t”形的凸起,并与开设在挤压杆16内侧滑槽滑动连接。
58.通过在连接底座1外部设置呈“t”形的凸起,并在挤压杆16内侧设置滑槽,使得挤压杆16只能上下滑动。
59.参照图5和图6所示,挤压杆16与真空吸盘的边缘位置对应,且挤压杆16的底部粘接有呈半球形的橡胶凸起。
60.通过将挤压杆16设置在靠近真空吸盘的边缘位置,能够对真空吸盘的边缘进行挤压固定,其次,通过将挤压杆16的一端设计呈半球形,避免损坏真空吸盘的边缘。
61.参照图4所示,安装座8的内部安装有用于检测支撑筒2和连接环3之间气压的气压传感器10。
62.通过在支撑筒2和连接环3之间设置气压传感器10,能够检测支撑筒2和连接环3之
间的压力是否稳定,方便及时进行修理与更换。
63.参照图4和图5所示,螺纹筒9设置有两组,且分别安装在连接环3和支撑筒2的中心处。
64.通过设置两组螺纹筒9,并分别安装在连接环3和支撑筒2的中心处,能够调节支撑筒2和连接环3之间的间距,以及连接环3和顶盖4之间的间距。
65.参照图5所示,隔板将支撑筒2内部空间分割为高压区和低压区,且气体发生器安装在高压区,并在气体发生器的一侧设置点火器。
66.通过在气体发生器的一侧设置点火器,能够加速气体发生器内部物质的反应。
67.参照图4所示,一号自锁电机6通过导线与安装在顶盖4内部的一号副电池电性连接。
68.顶盖4内的一号副电池为位于一号自锁电机6供电。
69.参照图4所示,二号自锁电机11和气压传感器10均通过导线与安装在安装座8内部的二号副电池电性连接。
70.安装座8内的二号副电池为位于二号自锁电机11供电。
71.参照图5所示,电磁阀13和点火器均通过导线与安装在支撑筒2内部的主电池电性连接,且安装在支撑筒2、连接环3和顶盖4内部的无线收发器总成之间无线连接。
72.通过在支撑筒2、连接环3和顶盖4的内部设置无线收发器总成,使得支撑筒2、连接环3和顶盖4之间进行无线通讯。
73.安装时,通过连接底座1底部的真空吸盘与机器人的外壁连接,连接完成后,由于挤压杆16内侧的延伸板15与连接底座1的边缘位置通过弹簧连接,因此在连接底座1与机器人的外壁连接完成后,连接底座1外部的挤压杆16向机器人的外部方向挤压,从而将连接底座1和机器人外壁之间的间隙堵住,防止外部物体碰撞或误触真空吸盘的边缘,从而提高真空吸盘使用时的安全性。
74.当需要快速升降时,通过控制安装座8的底部的二号自锁电机11调动二号丝杆12旋转,由于二号丝杆12与安装在支撑筒2中心处的螺纹筒9螺纹连接,因此在二号丝杆12旋转时,能够调整二号丝杆12伸出螺纹筒9的长度,即控制支撑筒2和连接环3之间的间距,之后控制位于高压区内部的点火器对气体发生器点火,使得气体发生器内部物质发生反应,从而产生大量气体,这些气体储存在高压区中,之后再控制隔板上的电磁阀13,将空气运输到低压区,使得位于低压区位置的气囊套14迅速膨胀,形成如图3所示形状,为机器人提供大量的浮力,同时还能通过控制电磁阀13来控制低压区气体的体积。
75.此外在上述两个实施例中,由于支撑筒2的内底面采用挠性薄壁材质,在支撑筒2的外底面一体成型有多圈同心但不同高度的挠性肋,该挠性肋肋体的底部扁平化打毛处理,每圈挠性肋肋体的底部预贴附在真空吸盘本体的顶部,但是挠性肋肋体的底部与真空吸盘仅仅是预贴附,并不是固定连接在一起,因此使得在吸盘吸附于机器人外壳上时,可以通过支撑筒2隔板下方的高压区实现支撑筒2内底面的挠性薄壁材质发生形变,从而对吸盘本体施加压力,从而使得吸盘更加牢固的吸附于机器人外壳上,增强吸附的牢固性。
76.此外在海底声呐机器人的不同方位处设置有多个悬浮装置,每个悬浮装置内的点火器、气压传感器、一号自锁电机6、二号自锁电机11、电磁阀13均连接到位于该悬浮装置内的无线收发器总成,多个悬浮装置内的多个无线收发器总成接收海底声呐机器人内的第二
微控制器的无线控制信号,使得多个悬浮装置能够分时或者同步工作于缓升/急升两种模式,且每个悬浮装置在每种模式下的缓升或者急升速率可以独立控制,使得多个不同方位设置的多个悬浮装置的独立操作使得可以在上浮或者其他作业工作过程中辅助完成机器人的不同姿态调整,具体为每个悬浮装置中的气囊膨胀程度不同/波纹管的伸缩长度不同,使得悬浮装置内部的体积不同,从而使得水下机器人在不同方位处收到的附力不同,产生扭转,此外不同悬浮装置在不同时刻执行缓升/急升动作,从而使得水下机器人的姿态也能够通过扭转实现,且能够得到精细化的姿态调整,上述不同位置的悬浮装置的缓升/急升动作的执行开始时刻以及模式内的膨胀和空间调整,均通过目标姿态和机器人内的微控制器及逆行运算,并无线发送控制指令,控制膨胀点火和电磁阀的开启时长/开启时刻/以及电机进行内部的空间调整,尤其是在高压区气体在释放完毕至低压区的气囊内前,提前关闭电磁阀,从而在气体释放和常态下均能够保持对吸盘的挤压,保持稳吸盘吸附的全周期稳定性。
77.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

