1.本发明涉及潜水器自动牵引技术领域,具体涉及一种潜水器出入隧洞的自动化牵引方法及系统。
背景技术:
2.潜水器因结构复杂,尺寸超大,造成出入特定的狭窄空间例如维修港口、隧洞、运河等较难。由于环境四周空间余量小,船体两边离岸壁距离通常小于2米,不容易控制,较易产生擦挂碰撞。目前,潜水器在狭窄空间下的移动主要依靠人工实现短距离移动和定位,不仅费时费力,而且效果不佳,对较大的潜水器通过狭窄空间甚至需要多达200
‑
300人才能实现,维修过程中也涉及潜水器的移动,通过人力牵引的定位效果差且效率较低。
技术实现要素:
3.本发明要解决的技术问题为目前对潜水器的牵引主要依靠人力,牵引的定位效果差、效率较低且费时费力成本,因此,本发明提供一种潜水器出入隧洞的自动化牵引方法及系统,通过适时调整拖曳设备的拖曳参数,实现调整潜水器的运行方向,提高潜水器的定位准确率和牵引效率。
4.本发明通过下述技术方案实现:
5.一种潜水器出入隧洞的自动化牵引方法,包括:
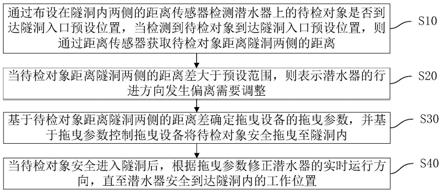
6.通过布设在隧洞内两侧的距离传感器检测潜水器上的待检对象是否到达隧洞入口预设位置,当检测到所述待检对象到达隧洞入口预设位置,则通过距离传感器获取待检对象距离隧洞两侧的距离;
7.当待检对象距离隧洞两侧的距离差大于预设范围,则表示潜水器的行进方向发生偏离需要调整;
8.基于所述待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并基于所述拖曳参数控制拖曳设备将待检对象安全拖曳至隧洞内;
9.当所述待检对象安全进入隧洞后,根据拖曳参数修正潜水器的实时运行方向,直至潜水器安全到达隧洞内的工作位置。
10.进一步地,所述拖曳参数包括在第n个方向上设置的拖曳绳索的拖曳力大小f
n
;所述基于所述待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,包括:
11.获取卷扬机的额定输出功率和额定转速以及拖曳绳索的拖曳速度,并基于所述额定输出功率和拖曳速度计算拖曳绳索的拖曳力大小,所述额定输出功率和额定转速计算卷扬机扭矩;
12.计算所述拖曳力大小公的式具体为:
13.f
n
=p/v
n
14.其中,f
n
为第n个方向的拖曳力大小,p为卷扬机的额定输出功率,v
n
为第n个方向的拖曳速度。
15.进一步地,所述根据拖曳参数修正潜水器的实时运行方向,包括:
16.实时获取布设在隧洞内两侧洞壁上的距离探测器测得的潜水器与对应隧洞洞壁的距离参数s
11
~s
1n
和s
21
~s
2n
,并基于所述距离参数确定潜水器的实时运行方向;
17.当所述距离参数s
11
~s
1n
和s
21
~s
2n
中存在小于预设距离阈值s0的值时,则表示潜水器偏离了正常行驶方向,通过距离参数确定偏离方向并通过调整潜水器上拖曳绳索的拖曳力大小f
n
降低潜水器的运行速度;
18.当潜水器的运行速度降低至预设值,则根据设置在潜水器上的角位移传感器确定拖曳力的方向;
19.基于拖曳力的方向和对应方向上的拖曳力大小f
n
修正潜水器的实时运行方向。
20.进一步地,当潜水器完成对应工作,则基于所述待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并根据潜水器的实时运行方向和拖曳参数实时修正潜水器的返回方向,直至潜水器安全离开隧洞。
21.进一步地,所述潜水器上的待检对象包括潜水器的头部和尾部潜水器上的待检对象包括潜水器的头部和尾部。
22.进一步地,在确定拖曳设备的拖曳参数后,所述潜水器出入隧洞的自动化牵引方法还包括:
23.在确定拖曳设备的拖曳参数后,生成拖曳设备挂靠语音,以使工作人员基于所述拖曳设备挂靠语音将拖曳设备挂靠至潜水器对应的牵引桩上。
24.进一步地,所述拖曳设备设置在隧洞内两侧的行驶轨道上,所述行驶轨道与拖曳设备的轮子之间设置有防倾覆的导向结构。
25.进一步地,所述一种潜水器出入隧洞的自动化牵引方法还包括:
26.通过实时检测浪的大小或者潜水器的位置,确定潜水器是否通过防浪网,当通过防浪网时切断潜水器的行驶动力并通知牵引小船牵引潜水器至隧洞入口预设位置。
27.一种潜水器出入隧洞的自动化牵引系统,包括:
28.待检对象参数获取模块,用于通过布设在隧洞内两侧的距离传感器检测潜水器上的待检对象是否到达隧洞入口预设位置,当检测到所述待检对象到达隧洞入口预设位置,则通过距离传感器获取待检对象距离隧洞两侧的距离;
29.潜水器行进方向偏离确定模块,用于当待检对象距离隧洞两侧的距离差大于预设范围,则表示潜水器的行进方向发生偏离需要调整;
30.安全拖曳模块,用于基于所述待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并基于所述拖曳参数控制拖曳设备将待检对象安全拖曳至隧洞内;
31.前进方向修正模块,用于当所述待检对象安全进入隧洞后,根据拖曳参数修正潜水器的实时运行方向,直至潜水器安全到达隧洞内的工作位置。
32.进一步地,所述潜水器行进方向偏离确定模块包括:
33.实时运行方向确定单元,用于实时获取布设在隧洞内两侧洞壁上的距离探测器测得的潜水器与对应隧洞洞壁的距离参数s
11
~s
1n
和s
21
~s
2n
,并基于所述距离参数确定潜水器的实时运行方向;
34.运行速度调整单元,用于当所述距离参数s
11
~s
1n
和s
21
~s
2n
中存在小于预设距离阈值s0的值时,则表示潜水器偏离了正常行驶方向,通过距离参数确定偏离方向并通过调
整潜水器上拖曳绳索的拖曳力大小f
n
降低潜水器的运行速度;
35.当前角度确定单元,用于当潜水器的运行速度降低至预设值,则根据设置在潜水器上的角位移传感器确定拖曳力的方向;
36.角度修正单元,用于基于拖曳力的方向和对应方向上的拖曳力大小f
n
修正潜水器的实时运行方向。
37.本发明提供的一种潜水器出入隧洞的自动化牵引方法及系统,通过布设在隧洞内两侧的距离传感器检测潜水器上的待检对象是否到达隧洞入口预设位置,当检测到待检对象到达隧洞入口预设位置,则通过距离传感器获取待检对象距离隧洞两侧的距离,当待检对象距离隧洞两侧的距离差大于预设范围,则表示潜水器的行进方向发生偏离需要调整;基于待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并将待检对象安全拖曳至隧洞内;当待检对象安全进入隧洞后,根据拖曳参数修正潜水器的实时运行方向,直至潜水器安全到达隧洞内的工作位置,实现系统快速、精简地自动校准,降低人工成本,提高定位准确率和牵引效率。
附图说明
38.此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
39.图1为本发明一种潜水器出入隧洞的自动化牵引方法的流程图;
40.图2为图1中步骤s40的一具体流程图;
41.图3为本发明一实施例中潜水器进入隧洞或者离开隧洞的示意图;
42.图4为本发明一实施例中潜水器的行驶趋势示意图;
43.图5为本发明一种潜水器出入隧洞的自动化牵引装置的示意图。
具体实施方式
44.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
45.实施例1
46.如图1所示,本实施例提供一种潜水器出入隧洞的自动化牵引方法,包括:
47.s10:通过布设在隧洞内两侧的距离传感器检测潜水器上的待检对象是否到达隧洞入口预设位置,当检测到待检对象到达隧洞入口预设位置,则通过距离传感器获取待检对象距离隧洞两侧的距离。
48.其中,潜水器上的待检对象包括潜水器的头部和尾部。当潜水器向隧洞驶入时,待检对象为潜水器的头部;当潜水器从隧洞驶离时,待检对象为潜水器的尾部。
49.s20:当待检对象距离隧洞两侧的距离差大于预设范围,则表示潜水器的行进方向发生偏离需要调整。
50.具体地,将潜水器的运行方向作为竖直方向,本实施例中的距离差指与潜水器运行方向垂直的位于同一水平方向上的两个距离传感测得的待检对象与对应隧道一侧(即潜水器中轴线左边对应隧道左侧,潜水器中轴线右边对应隧道右侧)距离之差。若同一水平方
向上的两个传感器测得的待检对象与对应隧道一侧的距离相等,则表示潜水器运行在隧洞正中间,其运行方向没有发生偏离;若同一水平方向上的两个传感器测得的待检对象与对应隧道一侧的距离不相等,则表示潜水器没有运行在隧洞正中间,其运行方向发生了偏离。
51.s30:基于待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并基于拖曳参数控制拖曳设备将待检对象安全拖曳至隧洞内。
52.具体地,在确定拖曳设备的拖曳参数后,生成拖曳设备挂靠语音,以使工作人员将拖曳设备挂靠至潜水器对应的牵引桩上。
53.本实施例中的拖曳设备包括但不限于拖曳船只和拖曳小车。
54.s40:当待检对象安全进入隧洞后,根据拖曳参数修正潜水器的实时运行方向,直至潜水器安全到达隧洞内的工作位置。待检对象进入隧洞的示意图具体如图3所示。进入隧洞后,潜水器的行驶趋势示意图如图4所示。
55.进一步地,拖曳参数为拖曳设备对应的参数,每个拖曳设备对应一个拖曳参数,本实施例中的拖曳设备包括拖曳绳索和卷扬机,拖曳参数为设置在不同方向上的拖曳绳索的拖曳力大小。如图2所示,步骤s30中,基于待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,具体包括如下步骤:
56.获取卷扬机的额定输出功率和额定转速以及拖曳绳索的拖曳速度,并基于额定输出功率和拖曳速度计算拖曳绳索的拖曳力大小,额定输出功率和额定转速计算卷扬机扭矩。
57.计算拖曳力大小的公式具体为:
58.f
n
=p/v
n
59.其中,f
n
为第n个方向的拖曳力大小,p为卷扬机的额定输出功率,v
n
为第n个方向的拖曳速度。
60.拖曳力大小f
n
通过卷扬机的额定输出功率p和拖曳绳索的拖曳速度v
n
计算得到,实际中由于生产机械效率和传动效率的影响,所选电机的额定功率应大于实际需要的输出功率,即实际选择的卷扬机其额定输出功率需大于实际所需要的输出功率,以确保能进行所需范围的拖曳力与拖曳速度的调节。通过拖曳绳索的拖曳速度完成对应拖曳力的大小控制。
61.进一步地,卷扬机选择可通过卷扬机的扭矩计算公示计算得到扭矩从而选择合适的卷扬机。卷扬机的扭矩计算公示具体为:
62.t=9550
×
p
÷
n
63.其中,t为卷扬机的扭矩,单位为nm(牛米);p为卷扬机的额定功率,单位为kw(千瓦);n为额定转速,单位是r/min(转每分)。
64.进一步地,如图2所示,步骤s40,根据拖曳参数修正潜水器的实时运行方向,具体包括如下步骤:
65.s41:实时获取布设在隧洞内两侧洞壁上的距离探测器测得的潜水器与对应隧洞洞壁的距离参数s
11
~s
1n
和s
21
~s
2n
,并基于距离参数确定潜水器的实时运行方向。
66.具体地,获取布设在隧洞内两侧洞壁的距离探测器测得的潜水器与对应隧洞洞壁的距离参数s
11
~s
1n
和s
21
~s
2n
,并根据潜水器的中轴线和距离参数确定潜水器对应部位的位置点,基于潜水器的中轴线将潜水器分为左侧和右侧,依次连接左侧的所有位置点,右侧
的所有位置点,确定潜水器的运行方向。
67.s42:当距离参数s
11
~s
1n
和s
21
~s
2n
中存在小于预设距离阈值s0的值时,则表示潜水器偏离了正常行驶方向,通过距离参数确定偏离方向并通过调整潜水器上拖曳绳索的拖曳力大小f
n
降低潜水器的运行速度。
68.s43:当潜水器的运行速度降低至预设值,则根据设置在潜水器上的角位移传感器确定拖曳力的方向。
69.s44:基于拖曳力的方向和对应方向上的拖曳力大小f
n
修正潜水器的实时运行方向。
70.为方便理解,本事实例以4个拖曳设备为例进行说明。将4个拖曳设备分为两组,每组两个,具体如图3所示。其中一组拖曳设备挂靠在潜水器的头部的牵引桩上,另一组拖曳设备挂靠至潜水器的尾部的牵引桩上。挂靠在头部的拖曳绳索的拖曳力大小左边设为f1,右边设为f2,尾部拖曳绳索的拖曳力大小左边设为f3,右边设为f4,拖曳力的方向可直接通过分布在卷扬机旁的角位移传感器测试角度得到,四个力的方向分别为θ1、θ2、θ3和θ4。
71.通过在水中或水下布置的速度传感器可直接测量潜水器的行驶速度v。v1=v/cosθ1,v2=v/cosθ2,v3=v/cosθ3,v4=v/cosθ4。潜水器正常行驶时,f1sinθ1≈f2sinθ2,f3sinθ3≈f4sinθ4,确保力在垂直方向上基本相等,从而理论上不进行偏离。
72.潜水器自动牵引启动时,f1cosθ1 f2cosθ2>f3cosθ3 f4cosθ4,由于f1cosθ1 f2cosθ2‑
(f3cosθ3 f4cosθ4)=ma,从而可以使潜水器以加速度a加速行驶,当测量得到的潜水器的行驶速度v达到设置的门限v0时,使f1cosθ1 f2cosθ2≈f3cosθ3 f4cosθ4,从而保持匀速行驶。当潜水器需要减速或停止时,使f1cosθ1 f2cosθ2<f3cosθ3 f4cosθ4,根据测得的潜水器的行驶速度进行拖曳力的持续控制。
73.当s
11
~s
1n
、s
21
~s
2n
中有距离小于设定的阈值s0时,表示潜水器的位置偏离了正常行驶方向,需要通过拖曳设备将其调整为正常行驶方向。具体为:首先根据测得的距离参数确定深潜器的具体偏离方向,偏离方向包括头部左边、头部右边、尾部左边和尾部右边4种情况。当潜水器头部右部的距离参数小于阈值s0,则潜水器的头部右边偏离。在确定潜水器的头部右边偏离,则降低潜水器的速度并结合设置在潜水器上的角位移传感器确定拖曳力的方向,使f1cosθ1 f2cosθ2<f3cosθ3 f4cosθ4,待速度降低到预设值时,需保证,f1sinθ1>f2sinθ2,同时f3sinθ3<f4sinθ4,当θ1=θ2、θ3=θ4时,潜水器已修正为正常行驶方向。由于实际中无法实现绝对相等,因此,本事实例中设置角度误差门限,当小于角度误差门限则认为相当,如角度误差门限设置为5
°
当θ1和θ2相差5
°
以内,则认为θ1=θ2,θ3和θ4相差5
°
以内,则认为θ3=θ4。
74.进一步地,当潜水器完成对应工作,则基于待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并根据潜水器的实时运行方向和拖曳参数实时修正潜水器的返回方向,直至潜水器安全离开隧洞。待检对象驶离隧洞的示意图具体如图3所示。
75.进一步地,拖曳设备设置在隧洞内两侧的行驶轨道上,行驶轨道与拖曳设备的轮子之间设置有防倾覆的导向结构。
76.进一步地,一种潜水器出入隧洞的自动化牵引方法还包括:
77.通过实时检测浪的大小或者潜水器的位置,确定潜水器是否通过防浪网,当通过防浪网时切断潜水器的行驶动力并通知牵引小船牵引潜水器至隧洞入口预设位置。
78.实施例2
79.如图5所示,本实施例提供一种与实施例1中潜水器出入隧洞的自动化牵引方法一一对应的潜水器出入隧洞的自动化牵引系统,包括:
80.待检对象参数获取模块10,用于通过布设在隧洞内两侧的距离传感器检测潜水器上的待检对象是否到达隧洞入口预设位置,当检测到待检对象到达隧洞入口预设位置,则通过距离传感器获取待检对象距离隧洞两侧的距离。
81.潜水器行进方向偏离确定模块20,用于当待检对象距离隧洞两侧的距离差大于预设范围,则表示潜水器的行进方向发生偏离需要调整。
82.安全拖曳模块30,用于基于待检对象距离隧洞两侧的距离差确定拖曳设备的拖曳参数,并基于拖曳参数控制拖曳设备将待检对象安全拖曳至隧洞内。
83.前进方向修正模块40,用于当待检对象安全进入隧洞后,根据拖曳参数修正潜水器的实时运行方向,直至潜水器安全到达隧洞内的工作位置。
84.进一步地,潜水器行进方向偏离确定模块包括:
85.实时运行方向确定单元,用于实时获取布设在隧洞内两侧洞壁的距离探测器测得的潜水器与对应隧洞洞壁的距离参数s
11
~s
1n
和s
21
~s
2n
,并基于距离参数确定潜水器的实时运行方向。
86.运行速度调整单元,用于当距离参数s
11
~s
1n
和s
21
~s
2n
中存在小于预设距离阈值s0的值时,则表示潜水器偏离了正常行驶方向,通过距离参数确定偏离方向并通过调整潜水器上拖曳绳索的拖曳力大小f
n
降低潜水器的运行速度。
87.当前角度确定单元,用于当潜水器的运行速度降低至预设值,则根据设置在潜水器上的角位移传感器确定拖曳力的方向。
88.角度修正单元,用于基于拖曳力的方向和对应方向上的拖曳力大小f
n
修正潜水器的实时运行方向。
89.以上的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

