1.本发明涉及一种连结有多个对物品进行输送的输送台车、且使所连结的多个输送台车沿着输送路径行驶的物品输送设备。
背景技术:
2.以往,作为这种物品输送设备有例如日本特开2005
‑
255331号所示的物品输送设备。
3.日本特开2005
‑
255331号的物品输送设备具有沿着轨道移动的多个输送台车,在移动方向上相邻的输送台车彼此通过连结部而相互连结。日本特开2005
‑
255331号的物品输送设备中,使所述输送台车沿着环状的轨道移动,在所述输送台车到达希望的分拣位置的时刻,将所述输送台车上的物品分拣到所述分拣位置。
4.在这样的现有物品输送设备中,在各输送台车之间设置有车轮,通过以规定的张力保持各输送台车之间的张力而使各输送台车沿着输送路径以稳定的状态行驶。
技术实现要素:
5.在现有物品输送设备中,如果通过缓和输送台车之间的张力来在输送台车之间施加压缩力,则设置于输送台车之间的车轮将从行驶面上浮。因此,在现有物品输送设备中,需要对输送台车之间的张力进行定期检测。但是,现有物品输送设备存在以下问题:只能在输送台车停止时进行输送台车之间的张力检测,每次进行输送台车之间的张力检测时都需要使所有输送台车停止,作业效率低。
6.另外,现有物品输送设备还存在以下问题:虽然通过对输送台车之间的张力进行检测来判断车轮相对于行驶面的上浮,但是,不能在输送台车行驶时进行输送台车之间的张力检测,因此不能在输送台车行驶时对车轮相对于行驶面的上浮进行判断,从而不能将车轮相对于行驶面的上浮防止于未然。
7.因而,本发明的目的在于提供一种能够在输送台车行驶时进行输送台车之间的张力的检测的物品输送设备。
8.本发明要解决的技术问题如上,接下来对用于解决该技术问题的手段进行说明。
9.即、本发明的物品输送设备为连结有多个对物品进行输送的输送台车、且使所连结的多个所述输送台车沿着输送路径行驶的物品输送设备,所述输送台车通过连结部而与相对于所述输送台车的行驶方向而言的前后方向上的其他输送台车连结,具有:测量部,其设置于所述连结部,对施加于所述输送台车之间的力进行测量;张力计算部,其基于由所述测量部测量出的施加于所述输送台车之间的力,对所述输送台车之间的张力进行计算;以及计算部,其基于由所述张力计算部计算出的所述输送台车之间的张力,对施加于所述输送台车的车轮的力进行计算。
10.根据上述结构,基于输送台车之间的张力来对施加于输送台车的车轮的力进行计算。
11.本发明的物品输送设备中,所述测量部设置于在各所述输送台车之间设置的所述连结部中的任意2个以上的所述连结部。
12.根据上述结构,基于利用设置于在各输送台车之间设置的连结部中的任意2个以上的连结部的测量部测量出的施加于输送台车之间的力,来计算出输送台车之间的张力,并计算出施加于输送台车的车轮的力。
13.本发明的物品输送设备中,所述测量部由测力传感器构成。
14.根据上述结构,利用测力传感器对施加于输送台车之间的力进行测量。
15.本发明的物品输送设备中,所述测量部设置于所述输送台车,所述张力计算部及所述计算部设置于供所述输送台车行驶的地面侧。
16.根据上述结构,在输送台车侧对施加于输送台车之间的力进行测量,在地面侧对输送台车之间的张力及施加于输送台车的车轮的力进行计算。
17.发明效果
18.根据本发明的物品输送设备,由设置于输送台车的测量部对施加于输送台车之间的力进行测量,并对输送台车之间的张力进行计算,因此,能够在输送台车行驶时对输送台车之间的张力进行检测,不需要在每次进行输送台车之间的张力的检测时使所有输送台车停止,因此作业效率得以提高。
19.另外,由于在输送台车行驶时对施加于车轮的力进行计算,因此,在输送台车行驶时,能够预先预测车轮相对于行驶面的上浮,由此能够将车轮相对于行驶面的上浮防止于未然。
附图说明
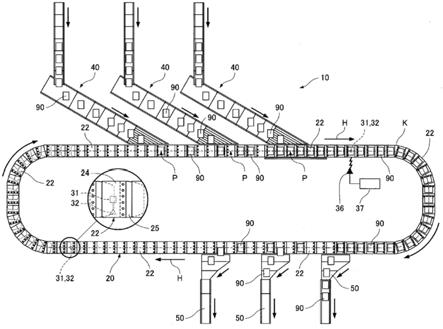
20.图1是本发明涉及的物品输送设备的概略俯视图。
21.图2是本发明涉及的物品输送设备的输送台车的立体图。
22.图3是本发明涉及的物品输送设备的输送台车之间的连结部的俯视图。
23.图4a是表示本发明涉及的物品输送设备的输送台车在水平轨道上行驶的情况下施加于输送台车的车轮的力的概略图。
24.图4b是表示本发明涉及的物品输送设备的输送台车在具有倾斜的轨道上行驶的情况下施加于输送台车的车轮的力的概略图。
25.图5是表示本发明涉及的物品输送设备的输送台车的张力监视系统的构成的框图。
具体实施方式
26.对本发明的实施方式的物品输送设备10进行说明。
27.如图1所示,物品输送设备10中形成有环状输送路径k。物品输送设备10主要由以下部分构成:沿着输送路径k对物品90进行输送的主输送装置20、将物品90投放到主输送装置20的输送路径k上的多个导入输送机40、以及接收从主输送装置20的输送路径k送出的物品90的多个滑槽50。在物品输送设备10中,物品90从规定的导入输送机40被投放到主输送装置20的输送路径k上。被投放到输送路径k上的物品90在物品投放位置p被主输送装置20接收。物品90被在输送路径k上行驶的输送台车22输送。由输送台车22输送的物品90被送出
到滑槽50。对各滑槽50分配有作为物品90的分拣目的地的店铺。物品90被送出到滑槽50,由此被分拣到对每个滑槽50分配的每个店铺。
28.如图1所示,导入输送机40在输送路径k的侧部沿着从输送台车22的行驶方向h的上游侧朝向下游侧的倾斜方向对物品90进行输送,在保持该物品90的输送姿势的状态下将物品90投放到输送台车22。导入输送机40沿着输送路径k设置有多条(图1中为3条)。导入输送机40与设置于输送路径k上的多处(图1中为3处)的物品投放位置p(导入输送机40将物品90投放到输送台车22的位置)分别对应地设置。在导入输送机40中,针对各导入输送机40的每一个来预先检索要投放物品90的输送台车22,并决定要投放物品90的输送台车22。导入输送机40针对按每个导入输送机40决定的规定的输送台车22投放物品90。
29.如图1所示,滑槽50接收从输送台车22送出的物品90,将所接收的物品90输送到下游的其他设备(例如出货设备)或者直接输送到车辆(例如卡车)等。滑槽50沿着输送路径k设置有多条(图1中为3条)。滑槽50从输送台车22接收针对各滑槽50的每一个预先决定的物品90。滑槽50是组合铁板等板状部件、辊式输送机、带式输送机等而构成的。滑槽50相对于主输送装置20从上方朝向下方倾斜。
30.如图1及图2所示,主输送装置20主要由沿着输送路径k设置的轨道21、以及沿着轨道21行驶的多个输送台车22构成。在主输送装置20,从导入输送机40向输送台车22投放物品90。载放有从导入输送机40投放来的物品90的输送台车22在轨道21上行驶,由此物品90沿着输送路径k被输送。由输送台车22输送的物品90从输送台车22被送出到滑槽50。
31.输送台车22在物品投放位置p接收从规定的导入输送机40投放来的物品90。输送台车22将所接收的物品90沿着输送路径k进行输送。输送台车22将沿着输送路径k输送的物品90向规定的滑槽50送出。
32.如图2及图3所示,输送台车22主要由在轨道21上行驶的主体23、以及载放并支撑物品90的带式输送机24构成。
33.主体23主要具备:用于在轨道21上行驶的车轮23a、以及对车轮23a、带式输送机24等进行支撑的框架23b。
34.带式输送机24设置于主体23的上部。带式输送机24构成为能够在与输送台车22的行驶方向h正交的方向上对所载放的物品90进行输送。带式输送机24具有用于对带进行驱动的马达26。带式输送机24在输送台车22到达规定的滑槽50时通过对带进行驱动而将物品90向滑槽50所处的方向排出。带式输送机24在利用输送台车22对物品90进行输送的过程中,在带式输送机24上的物品90偏离适当的位置的情况下,通过对带进行驱动而将物品90的载放位置调整到适当的位置。
35.输送台车22在输送路径k上与彼此相邻的其他输送台车22(相对于输送台车22的行驶方向h而言的前后方向上的其他输送台车22)连结。输送台车22以与相邻的其他输送台车22相连的状态在轨道21上行驶。输送台车22通过连结部27而与相邻的其他输送台车22连结。
36.连结部27主要由设置于框架23b的前端部的凸部27a、以及设置于框架23b的后端部的凹部27b构成。连结部27在相对于输送台车22的行驶方向而言的前后方向上相邻的输送台车22之间,以使设置于前方的输送台车22的前端部的凸部27a的突起部分与设置于后方的输送台车22的后端部的凹部27b的凹状部分嵌合的方式将该相邻的输送台车22连结起
来。
37.在上述相邻的输送台车22之间的间隙中,以覆盖连结部27的方式设置有罩25。罩25由对上述相邻的输送台车22之间的间隙进行封堵的板状部件构成。罩25固定于输送台车22的后侧端部(相对于输送台车22的行驶方向而言的后侧的端部)。
38.在连结部27上轴支撑有车轮23a。即、车轮23a设置于相邻的输送台车22之间的间隙。具体而言,车轮23a设置于输送台车22的后端部的凹部27b,轴支撑于凹部27b的左右方向(与输送台车22的行驶方向h水平正交的方向)的两端部。
39.如图1~图3所示,在各输送台车22之间设置的连结部27中的任意2个连结部27上,设置有对施加于由连结部27连结的输送台车22之间的力进行测量的测力传感器31(“测量部”的一例)。测力传感器31设置于在各输送台车22之间设置的连结部27中的预先设定的规定的2个连结部27。在此,所谓规定的2个连结部27,既可以是彼此接近的2个连结部27,也可以是彼此远离的2个连结部27,而不是特别限定的2个(2处)的连结部27。具体而言,测力传感器31在沿着轨道21行驶的多个输送台车22中的规定的2台输送台车22上,设置于在这2台输送台车22的前端部形成的凸部27a的中央部。设置于上述规定的2个连结部27中的一个连结部27的测力传感器31作为主(main)传感器来使用,设置于另一个连结部27的测力传感器31作为辅助(副)传感器来使用。设置于连结部27的主副测力传感器31在输送台车22行驶时,分别同时对施加于输送台车22之间的力进行测量。因此,在主测力传感器31因故障等而不能进行该力的测量的情况下,利用由副测力传感器31测量出的该力的数据来进行张力t的计算。
40.接下来,对主输送装置20上的输送台车22的张力监视系统进行说明。
41.在主输送装置20中,对施加于相邻的输送台车22之间的力进行测量,基于其测量值来对输送台车22之间的张力t进行计算。而且,基于计算出的输送台车22之间的张力t来对施加于在输送台车22之间设置的车轮23a的力f进行计算,并基于计算出的结果对车轮23a相对于轨道21的上浮进行判断。即、根据施加于车轮23a的力f来对车轮23a相对于轨道21的接地状态进行判断。如果施加于车轮23a的力f小于0(成为负值),则判断为车轮23a相对于轨道21发生了上浮。
42.如图4a及图4b所示,施加于在输送台车22之间设置的车轮23a的力f根据输送台车22的重量mg[n]、基于由测力传感器31测量出的施加于输送台车22之间的力而计算出的输送台车22之间的张力t[n]、以及轨道21的倾斜角度θ来计算。具体而言,施加于车轮23a的力f利用下式(1)来计算。
[0043]
f=mg tsinθ
ꢀꢀꢀꢀꢀ
(1)
[0044]
在此,轨道21的倾斜角度θ是针对每个输送路径k预先设定的角度。此外,轨道21的倾斜角度θ也可以与输送台车22之间的张力t的检测相应地使用随时测定的角度。
[0045]
施加于车轮23a的力f在输送台车22之间的张力t较大的情况下其值变大,在输送台车22之间的张力t较小的情况下其值变小。而且,在施加于车轮23a的力f小于0(成为负值)的情况下、即、输送台车22之间的张力t缓和而在输送台车22之间施加压缩力的情况下,车轮23a相对于轨道21上浮。另一方面,在施加于车轮23a的力f较大的情况下、即、在输送台车22之间被拉伸而对输送台车22之间施加拉伸力的情况下,车轮23a不会相对于轨道21上浮。
[0046]
这样,通过根据输送台车22之间的张力t来计算施加于在输送台车22之间设置的车轮23a的力f,能够对车轮23a是否相对于轨道21发生上浮进行判断。因此,在输送台车22行驶时,对由测力传感器31测量的输送台车22之间的张力t定期进行监视,并且在基于输送台车22之间的张力t而计算出的施加于车轮23a的力f变成0的时刻使输送台车22的行驶停止,由此能够将车轮23a的上浮防止于未然。
[0047]
在此,对输送台车22的张力监视系统的结构进行说明。
[0048]
如图1~图3及图5所示,主输送装置20在输送台车22上具有:对施加于输送台车22之间的力进行测量的测力传感器31(“测量部”一例)、以及发送机32。
[0049]
发送机32将由测力传感器31测量出的施加于输送台车22之间的力的测量值发送给后述的接收机36。发送机32设置于设置测力传感器31的输送台车22的主体23(框架23b)。发送机32与测力传感器31连接。发送机32将来自测力传感器31的信号发送给接收机36。
[0050]
另外,主输送装置20在供输送台车22行驶的地面侧(输送台车22以外的位置)具有接收机36、以及控制器37(“张力计算部”、“计算部”的一例)。
[0051]
接收机36接收从发送机32发送的信号(施加于输送台车22之间的力的测量值)。接收机36以能够无线接收来自发送机32的信号的方式设置在不妨碍输送台车22行驶的输送路径k的侧方的规定位置。接收机36在具有发送机32的输送台车22在接收机36的接收范围内行驶时,接收来自发送机32的信号。即、每当具有发送机32的输送台车22绕输送路径k一周时(每当具有发送机32的输送台车22在接收机36的接收范围内行驶时)就进行施加于输送台车22之间的力的测量、也就是输送台车22之间的张力t的检测。
[0052]
控制器37对整个主输送装置20进行控制,与包括接收机36在内的主输送装置20内的各部连接。控制器37基于由接收机36接收的施加于输送台车22之间的力的测量值来对输送台车22之间的张力t进行计算。即、控制器37基于由测力传感器31测量出的施加于输送台车22之间的力的测量值来对输送台车22之间的张力t进行计算。另外,控制器37基于输送台车22之间的张力t的计算结果来对施加于在输送台车22之间设置的车轮23a的力f进行计算。此外,控制器37还基于施加于车轮23a的力f的计算结果来对车轮23a是否相对于轨道21发生了上浮进行判断。具体而言,控制器37基于上述式(1)来对施加于车轮23a的力f进行计算,在计算结果是施加于车轮23a的力f为0的情况下在该时刻使输送台车22的行驶停止。即、控制器37基于施加于车轮23a的力f来对输送台车22的行驶进行控制,其中,施加于车轮23a的力f是基于输送台车22之间的张力t计算出的。此外,控制器37还可以构成为在计算出施加于车轮23a的力f为0的情况下,除了使输送台车22的行驶停止以外,还通过警示灯、警示音等来告知该情况。
[0053]
控制器37基于从具有主测力传感器31的输送台车22的发送机32发送的信号(施加于输送台车22之间的力的测量值)来对输送台车22之间的张力t进行计算,并对施加于车轮23a的力f进行计算。另一方面,控制器37在主测力传感器31因故障等而不能进行施加于输送台车22之间的力的测量的情况下,基于从具有副测力传感器31的输送台车22的发送机32发送的信号(施加于输送台车22之间的力的测量值)来对输送台车22之间的张力t进行计算,并对施加于车轮23a的力f进行计算。
[0054]
这样,在主输送装置20中,利用输送台车22上的测力传感器31进行(在输送台车22侧进行)用于对输送台车22之间的张力t进行计算的施加于输送台车22之间的力的测量,在
供输送台车22行驶的地面侧(输送台车22以外的位置)进行输送台车22之间的张力t及施加于车轮23a的力f的计算。
[0055]
如上所述,根据本实施方式,利用设置于输送台车22的测力传感器31对施加于输送台车22之间的力进行测量,并对输送台车22之间的张力t进行计算,因此,能够在输送台车22行驶时检测出输送台车22之间的张力t,不需要在每次进行输送台车22之间的张力t的检测时使所有输送台车22停止,因此作业效率得以提高。
[0056]
另外,由于在输送台车22行驶时对施加于车轮23a的力f进行计算,因此,在输送台车22行驶时,能够预先预测车轮23a相对于轨道21的上浮,由此能够将车轮23a相对于轨道21的上浮防止于未然。
[0057]
根据本实施方式,测力传感器31设置于在各输送台车22之间设置的连结部27中的任意2个连结部27,因此,能够以较少的部件数量来测量施加于输送台车22之间的力。另外,即使在设置于上述2个连结部27中的一个连结部27的测力传感器31因故障等而不能进行施加于输送台车22之间的力的测量的情况下,也能够利用设置于上述2个连结部27中的另一个连结部27的测力传感器31进行该力的测量,因此,能够可靠地进行输送台车22之间的张力t的检测。
[0058]
根据本实施方式,在主输送装置20的输送台车22的张力监视系统中,将对施加于输送台车22之间的力进行测量的测力传感器31搭载于输送台车22,将对输送台车22之间的张力t及施加于车轮23a的力f进行计算的控制器37设置于输送台车22以外的地面侧,由此,不使输送台车22的行驶停止,就能够在输送台车22行驶的过程中对施加于输送台车22之间的力进行测量,并对输送台车22之间的张力t及施加于车轮23a的力f进行计算。
[0059]
另外,在本实施方式中,利用带式输送机24(自身驱动的交叉传送带式)来构成主输送装置20(输送台车22)的物品支撑体,但是,并不限于此,只要是能够载放并支撑物品90的结构,则也可以由例如托盘(非自身驱动的倾斜托盘式)来构成。
[0060]
在本实施方式中,测力传感器31设置于在各输送台车22之间设置的连结部27中的任意2个连结部27,但是,并不限于此,只要是能够对施加于输送台车22之间的力进行测量的结构,则也可以将测力传感器31设置于在各输送台车22之间设置的连结部27中的任意1个连结部27、或者3个以上连结部27。
[0061]
在本实施方式中,使对施加于输送台车22之间的力进行测量的测量部为测力传感器31,但是,并不限于此,只要是能够对施加于输送台车22之间的力进行测量的机构即可。
[0062]
在本实施方式中,利用同一控制器37来进行输送台车22之间的张力t的计算、以及施加于输送台车22的车轮23a的力f的计算,但是,并不限于此,也可以利用不同的控制器来进行输送台车22之间的张力t的计算、以及施加于输送台车22的车轮23a的力f的计算。即、也可以利用不同的控制器来构成张力计算部和计算部。
[0063]
在本实施方式中,利用设置于供输送台车22行驶的地面侧(输送台车22以外的位置)的控制器37来进行输送台车22之间的张力t的计算,但是,并不限于此,也可以将对输送台车22之间的张力t进行计算的控制器设置于输送台车22,在输送台车22上进行输送台车22之间的张力t的计算。即、也可以采用在输送台车22上进行输送台车22之间的张力t的检测的结构。
[0064]
附图标记说明
[0065]
10
…
物品输送设备;22
…
输送台车;23a
…
车轮;27
…
连结部;31
…
测力传感器(测量部);37
…
控制器(张力计算部、计算部);90
…
物品;f
…
施加于车轮的力;k
…
输送路径;h
…
行驶方向;t
…
输送台车之间的张力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

