1.本发明涉及消防设备领域,特别涉及一种用于墙壁行进装置的固墙锚钉。
背景技术:
2.当火灾发生时,现有的消防技术为使用云梯和消防水枪进行灭火和救援,由于消防设备的限制,现代的消防技术还需要人手灭火,特别是针对大型多层建筑的火灾现场,通过人手使用云梯和消防水枪的配合在高空对火灾现场进行灭火,现有的灭火救援方式还具有很大的弊端,从而导致灭火、救援困难,例如在大型火灾救援时一般需要的人手很多,而救援人员一般需要在一定的距离内靠近火场才能进行灭火救援,在火势较大的现场容易因各种变故的发生导致救援人员的受伤甚至牺牲,在我国,每年因救援火灾而造成伤亡的救护人员就有数百人之多,传统的救援方式已经不满足于现代需求;
3.另外,救援人员需要使用的灭火、救援设备繁多,设备需要做的灭火准备时间较长,容易影响救援时间,导致火势的蔓延,因此,现代的消防设备中,开发了消防救援机器人,现有的灭火设备,有专用于消防救援用的机器人,能在一定的程度减轻救援人员的工作,而现有的消防救援机器人不具有稳固、高效攀爬墙面的功能,一般只适合在地面上进行喷水洒水,在高层建筑的火场中能发挥的作用很小,功能性不足,难以做到陆空两用;
4.由于未能有能使机器人在墙壁上稳固进行攀爬的技术,导致机器人一般需要借助吊具或在机器人脚部安装吸盘才能实现高空救援,但显然,使用吊具的方式十分耗费资源,效果并不显著,而利用吸盘实现爬墙的技术仅适合在光滑的墙壁上使用,例如玻璃、陶瓷,不能应对例如水泥、木材等墙面的攀爬,且效率非常低,对救援造成时间拖延,具有很大弊端,因此,能使机器人在墙壁上稳固、快速地进行攀爬为实现机器人救援的重点,且需要适应多种墙面的攀爬,显然现代科技中还未能做到此点。
5.故此,现有的消防救援机器人需要进一步改善。
技术实现要素:
6.针对上述现有技术,本发明要实现的技术是:使锚钉能稳固地固定在墙壁上,配合墙壁行进装置,使机器人在爬墙时具有良好的稳定性。
7.为了达到上述目的,本发明采用以下方案:
8.一种固墙锚钉,包括有钉身,在所述钉身上活动设置有墙壁固定部件,在所述钉身一侧设有钉帽,在所述钉帽上设有能驱动墙壁固定部件向外延伸打开的联动结构,在所述钉帽上设置有能使钉帽被带动活动的火芯。
9.进一步地,本发明中的钉身内部设有凹腔,所述凹腔顶部开口,在所述钉身上设置有多个连通凹腔的侧腔。
10.进一步地,本发明中的墙壁固定部件铰接在侧腔内部。
11.进一步地,本发明中的联动结构包括有设置在钉帽底部并活动插设在凹腔内部的联动杆,在所述联动杆上设置有形槽,在所述墙壁固定部件内侧固设有顶块,所述顶块活动
设置在形槽内。
12.优选地,本发明中的钉帽顶部设置有嵌槽。
13.进一步地,本发明中的火芯包括有嵌设在嵌槽内的火药盒,在所述火药盒内部上侧固设有引燃物,在所述火药盒内填充有火药并将引燃物包覆在内,在所述火药盒内部底壁固设有多个能固定火药的凸柱。
14.优选地,本发明中的引燃物为硝石。
15.进一步地,本发明中的火药盒使用耐高温材料制成。
16.优选地,本发明中的钉身下端呈圆锥状。
17.进一步地,本发明中的固墙锚钉用于墙壁行进装置。
18.综上所述,本发明相对于现有技术其有益效果是:
19.本发明结构简单,使用方便,通过将本锚钉预先安装在墙壁行进装置上,进一步通过墙壁行进装置将锚钉射出至墙壁上,能使墙壁行进装置稳固地固定在锚钉上,通过救援机器人的脚部上多个的墙壁行进装置和锚钉的配合,使机器人能稳定地在墙壁上行走,方便机器人固定在墙壁上对火灾现场进行洒水等灭火救援工作,且本锚钉适应各种不同的墙面,例如水泥、木板等材质的墙面,本锚钉在嵌入墙壁上后能进一步活动,使原本嵌入墙壁上的锚钉更加稳固地嵌入墙壁上,承重力相比现有技术更强,防止在爬墙时因重量过大导致机器人脱墙,造成机器损失或救援人员伤亡,解决现有技术当高层建筑物发生火灾时灭火救援困难的弊端,锚钉和墙壁行进装置的配合使机器人能够陆空两用,能极大程度减轻救援人员的救援压力,减少人员的使用,从而降低救援人员的伤亡率。
附图说明
20.图1为本发明的立体示意图之一。
21.图2为本发明的立体示意图之二。
22.图3为本发明的立体剖析示意图。
23.图4为本发明的立体分解示意图。
具体实施方式
24.下面结合附图说明和具体实施方式对本发明作进一步描述:
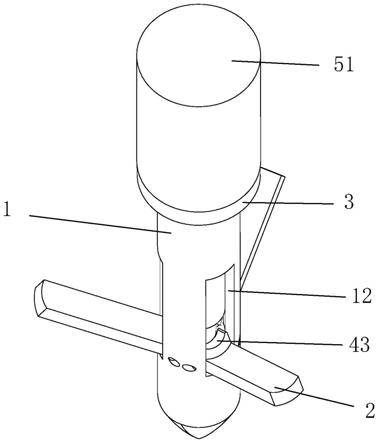
25.如图1至4所示的一种固墙锚钉,包括有钉身1,在所述钉身1上活动设置有墙壁固定部件2,在所述钉身1一侧设有钉帽3,在所述钉帽3上设有能驱动墙壁固定部件2向外延伸打开的联动结构4,在所述钉帽3上设置有能使钉帽3被带动活动的火芯5,使用时,多个的本锚钉整体预先安装在墙壁行进装置上,通过墙壁行进装置的启动,将火芯切割,火芯收到挤压引燃爆炸,使钉帽被爆炸力驱动,带动钉身向墙面喷射而出,当钉身插入墙壁时,由于钉身整体位于墙壁行进装置的脱钉槽内,因此钉帽将被卡在脱钉槽内,而此时钉身受爆炸力冲击仍处于在墙壁内射行状态,此时钉帽的停止状态将通过连动结构将墙壁固定部件带动张开,墙壁固定部件将如同倒刺般卡入墙壁内实现固定,此时钉身稳固固定在墙壁内,随后,可通过本锚钉的进一步形变实现更稳固的固定,具体操作是,由于锚钉卡在墙壁行进装置的脱钉槽内,可通过墙壁行进装置的爬行脚沿墙壁向外侧翻转,使钉帽被带动向外侧同时移动,此时联动结构将进一步带动墙壁固定部件向外张开,实现更进一步稳固的墙壁固
定,当本锚钉完全稳固地嵌入在墙壁后,通过机器人带动墙壁行进装置的活动,使墙壁行进装置的爬行脚以锚钉为支撑点向上攀爬,再通过机器人多个脚部上的墙壁行进装置与锚钉的配合,实现机器人的墙壁爬行。
26.本发明中所述钉身1内部设有凹腔11,所述凹腔11顶部开口,在所述钉身1上设置有多个连通凹腔11的侧腔12,凹腔应与钉身同心设置,凹腔用于联动结构和墙壁固定部件的配合使用,侧腔可设置为多个,用于与墙壁固定部件的铰接。
27.本发明中所述墙壁固定部件2铰接在侧腔12内部,墙壁固定部件和侧腔的铰接点应设在下段,使墙壁固定部件的转动能如同倒刺卡入墙壁内。
28.本发明中所述联动结构4包括有设置在钉帽3底部并活动插设在凹腔11内部的联动杆41,在所述联动杆41上设置有形槽42,在所述墙壁固定部件2内侧固设有顶块43,所述顶块43活动设置在形槽42内,当火芯被墙壁行进装置切割挤压,钉帽带动钉身向墙壁射出时,钉身嵌入墙壁内,由于爬行脚上的脱钉槽将钉帽卡死,钉身此时仍处于射行状态,联动杆将由于钉帽的卡死在钉身内活动,使联动杆往脱离凹腔的方向移动,而因顶块一直处于形槽内,当联动杆移动时,将通过形槽的位移带动多个的顶块同时活动,从而使墙壁固定部件沿着铰接点转动,从而使墙壁固定部件张开,如同倒刺般卡死在墙壁内,墙壁行进装置也因此稳固地卡在钉帽和墙壁之间,当机器人需要行进时,可进一步通过墙壁行进装置上的爬行脚转动,利用杠杆原理使钉帽进一步被拉出,从而通过联动使各个墙壁固定部件进一步翻转,实现更强的固定,而爬行脚此刻为可活动状态,配合机器人的多只脚部活动,实现爬墙行进的目的。
29.本发明中所述钉帽3顶部设置有嵌槽31,嵌槽用于安装火芯,防止在火芯在被切割挤压时与钉帽偏位,优选使用本嵌槽,成本低廉,也可使用胶水或通过折弯铝材将火芯固定。
30.本发明中所述火芯5包括有嵌设在嵌槽31内的火药盒51,在所述火药盒51内部上侧固设有引燃物52,在所述火药盒51内填充有火药并将引燃物52包覆在内,在所述火药盒51内部底壁固设有多个能固定火药的凸柱53,当墙壁行进装置上的击发结构将火药盒切割,使火药盒被瞬间挤压变形,从而使内部的引燃物被瞬间挤压,使引燃物被引燃,带动周围的火药引燃,从而使钉帽被推动射出,凸柱用于固定火药,防止火药在火药盒内无规则移动,类似于混凝土内的钢筋所起的作用。
31.本发明中所述引燃物53为硝石,燃点低,被力量瞬间挤压后能燃烧。
32.本发明中所述火药盒51使用耐高温材料制成,由于墙壁行进装置在多次射出固墙锚钉后,内部的锚钉击发管将快速升温,为防止内部火药意外被引燃,火药盒使用耐高温的材料。
33.本发明中所述钉身1下端呈圆锥状,优选为圆锥形,也可以是其他尖锐的形状,便于嵌入墙壁内。
34.本发明中所述的一种固墙锚钉,所述固墙锚钉用于该墙壁行进装置,本固墙锚钉可用于墙壁行进装置,固墙锚钉装入墙壁行进装置并射击至墙壁后,能用作消防机器人爬墙的着陆点。
35.以上显示和描述了本发明的基本原理和主要特征以及本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明
本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

