1.本实用新型涉及人工智能设备技术领域,特别是涉及一种人工智能设备的保护装置。
背景技术:
2.随着社会的发展,科学技术的进步,在我们日常的生产生活中均会使用到人工智能设备,针对具有行走功能的人工智能设备,其在行走的过程中当外部环境出现改变时,会存在产生倾倒的现象,且当人工智能设备发生倾倒后,会使人工智能设备存在出现故障或损坏的风险,为此,我们提出了一种人工智能设备的保护装置。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种人工智能设备的保护装置。
4.本实用新型解决其技术问题所采用的技术方案是:一种人工智能设备的保护装置,包括壳体和防撞块,所述壳体内部为中空且前端为开口端,所述防撞块位于所述壳体开口端且与其滑动连接,所述壳体后端内侧设置有安装板,所述安装板前端与壳体后端内侧活动连接,所述壳体左右内壁前侧且位于防撞块左右两端均开设有侧槽,所述侧槽内侧内壁设有两个呈前后分布的槽口,所述侧槽内部滑动连接有卡板,所述卡板内侧后端延伸出侧槽至壳体内部,所述卡板内侧前端开设有凹槽,所述凹槽内壁前端固定连接有直角铰链,所述卡板通过直角铰链铰接有卡块,所述壳体内部且位于防撞块后端设置有推板,所述壳体内后壁左右侧且位于推板后端固定连接有滑条,所述推板后端左右侧固定连接有限位板,所述限位板外侧均开设滑槽,所述滑条位于滑槽内部且与其滑动连接,所述壳体内部且位于推板后端安装有电动缸,所述电动缸动力输出端与推板后端固定,所述电动缸左右两侧均设置有两块挡板,相邻的所述挡板上端之间转动连接有转轴,所述转轴外部固定有向下延伸的连接线,所述连接线下端固定连接有金属块,左右两端的所述挡板前端均固定连接有压力传感器。
5.具体的,所述防撞块两侧均开设有卡槽,所述卡块插入到卡槽内且与其卡接。
6.具体的,所述直角铰链与凹槽内壁前端之间设置有扭力弹簧。
7.具体的,所述推板前端固定连接有三个主弹簧,所述主弹簧前端与防撞块后端相固定。
8.具体的,所述防撞块由橡胶制成。
9.具体的,所述压力传感器与电动缸信号连接。
10.具体的,所述侧槽内部嵌入有次弹簧,所述次弹簧前后两端分别与侧槽内壁前侧和卡板前端相接触。
11.与现有技术相比,本实用新型实现的有益效果:该种人工智能设备的保护装置,通过调节安装板和壳体的角度使得壳体保持水平,并且将安装板固定在人工智能设备肩部,
装置可以实现隐藏式安装,通过金属块受到设备倾斜而产生的惯性将压力传感器触发,使得电动缸带动推板前移,进而使得防撞块弹出,以保护设备,这样就可以实现装置在人工智能设备上的隐藏式安装,有利于在安装的过程中实现人工智能设备的美观,且在使用的过程中,当人工智能设备出现倾倒时,能够对人工智能设备进行防护,避免了人工智能设备在倾倒后出现故障或损坏的风险,增加了人工智能设备使用寿命。
附图说明
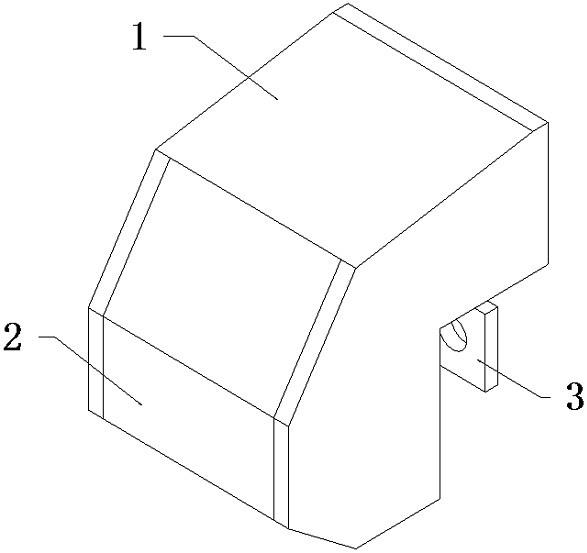
12.图1为本实用新型整体示意图;
13.图2为本实用新型整体后端示意图;
14.图3为本实用新型壳体右侧剖切图;
15.图4为本实用新型壳体上部剖切图;
16.图5为本实用新型图4的a局放大图;
17.图6为本实用新型金属块示意图。
18.图中:壳体
‑
1、防撞块
‑
2、安装板
‑
3、推板
‑
4、电动缸
‑
5、挡板
‑
6、限位板
‑
7、滑槽
‑
8、主弹簧
‑
9、卡槽
‑
10、滑条
‑
11、侧槽
‑
12、卡板
‑
13、次弹簧
‑
14、卡块
‑
15、直角铰链
‑
16、凹槽
‑
17、金属块
‑
18、连接线
‑
19、转轴
‑
20、压力传感器
‑
21。
具体实施方式
19.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
20.请参阅图1
‑
6,本实用新型提供一种技术方案:一种人工智能设备的保护装置,包括壳体1和防撞块2,壳体1内部为中空且前端为开口端,防撞块2位于壳体1开口端且与其滑动连接,壳体1后端内侧设置有安装板3,安装板3前端与壳体1后端内侧活动连接,壳体1左右内壁前侧且位于防撞块2左右两端均开设有侧槽12,侧槽12内侧内壁设有两个呈前后分布的槽口,侧槽12内部滑动连接有卡板13,卡板13内侧后端延伸出侧槽12至壳体1内部,卡板13内侧前端开设有凹槽17,凹槽17内壁前端固定连接有直角铰链16,卡板13通过直角铰链16铰接有卡块15,壳体1内部且位于防撞块2后端设置有推板4,壳体1内后壁左右侧且位于推板4后端固定连接有滑条11,推板4后端左右侧固定连接有限位板7,限位板7外侧均开设滑槽8,滑条11位于滑槽8内部且与其滑动连接,壳体1内部且位于推板4后端安装有电动缸5,电动缸5动力输出端与推板4后端固定,电动缸5左右两侧均设置有两块挡板6,相邻的挡板6上端之间转动连接有转轴20,转轴20外部固定有向下延伸的连接线19,连接线19下端固定连接有金属块18,左右两端的挡板6前端均固定连接有压力传感器21,防撞块2两侧均开设有卡槽10,卡块15插入到卡槽10内且与其卡接,直角铰链16与凹槽17内壁前端之间设置有扭力弹簧,推板4前端固定连接有三个主弹簧9,主弹簧9前端与防撞块2后端相固定,防撞块2由橡胶制成,压力传感器21与电动缸5信号连接,侧槽12内部嵌入有次弹簧14,次弹簧14前后两端分别与侧槽12内壁前侧和卡板13前端相接触;
21.首先,通过将安装板3安装于可行走的人工智能设备的肩部或躯干其他部位,并通过调整安装板3与壳体1之间的角度,使得壳体1与人工智能躯干保持水平,并且使用螺栓将之固定,而初始状态时的防撞块2是处于壳体1内部的,并且在壳体1和与防撞块外侧形状相
契合,这样防撞块2能够对壳体1内部的间歇进行隐藏,从而有利于整个装置的美观,这样就完成了装置的隐藏式安装,接着将压力传感器21和电动缸5均与人工智能设备内部电源相连接,这样就完成了装置的安装,此时的金属块18受到重力的影响处于垂直状态;
22.这样,当人工智能设备进行行走时,金属块18会受到惯性的影响会进行前后摇摆进而通过连接线19带动转轴20进行旋转,而当人工智能设备发生倾倒时,金属块18会受到应装置倾斜而产生的惯性向前摆动的角度会加大,使得金属块18与挡板6前端的压力传感器21接触,使得两个压力传感器21均被触发,进而向电动缸5传递信号,进而启动电动缸5,通过电动缸5的动力输出端将推板4向前推动,并且后端的限位板7通过滑槽8与滑条11滑动连接的,这样在推板4会受到限位板7的限制而水平向前移动,进而使得防撞块2与推板4之间的主弹簧9收缩,接着推板4前端会与卡板13的后端接触并且挤压卡板13,使得卡板13向前移动,进而使得卡块15跟随卡板13向前移动,这样卡块15会被侧槽12槽口挤压而向凹槽17内转动,待卡块15从卡槽10转动到凹槽17内时,使得防撞块2不再被卡块15阻挡,使得防撞块2受到主弹簧9的弹力而从壳体1中弹出,这样在人工智能设备完全倾倒接触地面前,防撞块2会优先与地面接触,这样就可以将人工智能设备支撑起来,防止人工智能设备与地面碰撞,这样就能够对人工智能设备进行防护,避免了人工智能设备在倾倒后出现故障或损坏的风险,增加了人工智能设备使用寿命。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

