1.本实用新型涉及车辆行走机构技术领域,具体的说是一种多角度行驶车。
背景技术:
2.机器人车辆在如今智能时代已成为一种十分常见的车辆,在消防、反恐、灾害搜救等场合中发挥很大作用,但在这些场合中由于环境较为复杂,路面崎岖,并且由于空间较为狭窄,机器人车辆的转弯角度半径过大,容易受场地限制而无法转向,因而使用场合限制过大,无法应用在一些极端环境中。
3.中国专利文献cn109353407a公开了一种全向行驶车辆模块化驱动转向系统及车辆,该驱动转向系统包括悬架连杆、减震器、转向电机、减速器、角度传感器、车轮支架、车轮和驱动电机等。转向电机通过联轴器、减速器驱动车架带动车轮独立全向水平360
°
全向范围转向。通过角度传感器精确检测轮胎位置,实现快速精确地的转向控制。驱动电机安装于轮胎内直接驱动车轮转动。转向电机固定于车底盘上,降低了系统的等效簧下质量,减少共振以及来自路面的冲击和振动,改善汽车行驶的平稳性。该车辆采用本实用新型提供的全向行驶车辆模块化驱动转向系统。本实用新型具有结构简单可靠,并可实现车辆车轮进行独立全向转向与驱动,提高了转向系统的控制精度和响应速度,但该装置由于无法兼顾行进和360
°
转向,其无法应用在一些路面崎岖,且小范围的场地中,使用场合受限,并且该车辆结构减震效果有限,在一些起伏较大的路面,减震机构效果不明显,车辆晃动较大。
4.中国专利文献cn207644444u公开了一种转向控制系统,包括方向盘系统、控制器和切换开关,还包括依次布置的左前车轮系统、右前车轮系统、右后车轮系统和左后车轮系统,所述方向盘系统用于驱动所述左前车轮系统和右前车轮系统转向,所述控制器用于控制车轮系统转向,所述切换开关用于切换相邻的车轮系统。本技术提供的转向控制系统,在车辆横行模式下,切换开关可对相邻的车轮系统进行切换,使方向盘系统驱动切换后新成为的左前车轮系统和右前车轮系统进行转向,即在横行模式下可通过方向盘系统控制车轮系统横向行走,使车辆的行走路线保持直线横行,而不会发生偏斜,提高了车辆转向的可操纵性和安全性,该装置中转向结构较为复杂,操作繁琐,且无减震机构,车辆晃动较大,行驶过程中对车体损伤较大。
技术实现要素:
5.针对上述现有技术中存在的问题,本实用新型公布了一种多角度行驶车,本实用新型通过采用独立控制驱动的可360
°
转向的车轮组件,实现车辆360
°
全方位行驶,同时保持车辆行进过程中车轮与地面充分接触,适用于各种崎岖地形,该装置解决了现有技术中行驶车辆转向角度受限且行进过程易打滑的问题。
6.本实用新型所公开的具体的技术方案如下:一种多角度行驶车,包括车架、承重轴、悬架连杆和车轮组件,所述承重轴固定连接在车架中部,所述悬架连杆设有两组,分别位于车架两侧,且每组悬架连杆的中部位置分别连接承重轴端部;每组悬架连杆的端部下
方均连接有一组车轮组件,所述车轮组件包括水平固定板、竖向固定板和车轮转向机构,所述水平固定板与竖向固定板垂直连接,所述车轮转向机构包括第一齿轮、回转支承机构和转向电机,所述回转支承机构位于水平固定板上方,且所述回转支承机构的轴向垂直水平固定板,所述回转支承机构与悬架连杆的端部固定连接;所述回转支承机构包括第二齿轮和支承固定环,所述水平固定板上表面固定连接有支承固定环,所述支承固定环与第二齿轮配合固定,且支承固定环与第二齿轮之间周向旋转;所述第一齿轮位于所述第二齿轮侧方,且所述第一齿轮和第二齿轮啮合;所述水平固定板下表面固定连接有转向电机,所述转向电机的驱动轴穿过水平固定板与第一齿轮的轴心固定连接。
7.上述车轮转向机构中第一齿轮和水平固定板无直接连接关系,第二齿轮虽位于水平固定板上方,但第二齿轮与水平固定板之间通过支承固定环与第二齿轮间隙配合,从而保持轴向位置固定,而周向保持旋转,通过转向电机驱动第一齿轮转动,由于第一齿轮和第二齿轮啮合,且第二齿轮保持固定,因而第一齿轮环绕第二齿轮旋转,进而带动水平固定板以及相连接的车轮变换方向。
8.进一步的,所述竖向固定板上设有车轮转轴,所述车轮转轴与竖向固定板沿车轮转轴的轴向固定,所述车轮转轴与竖向固定板之间沿车轮转轴的周向旋转。
9.进一步的,所述车轮转轴上位于竖向固定板内侧的一端固定连接车轮,车轮转轴上位于竖向固定板外侧的一端固定连接第一链轮。
10.进一步的,所述竖向固定板内侧固定连接有行进电机,且所述行进电机位于车轮上方。
11.进一步的,所述行进电机的驱动轴伸出至竖向固定板外侧,且行进电机的驱动轴端部固定连接有第二链轮。
12.进一步的,所述第一链轮与第二链轮的旋转平面竖向重合,第一链轮和第二链轮之间通过传动链连接,可将驱动电机的动力传递至车轮,从而保持车轮旋转及改变旋转方向。
13.进一步的,所述支承固定环的中心设有角度传感器,所述角度传感器用于测量支承固定环与第二齿轮之间的旋转角度。通过每个车轮组件中安装的角度传感器可监测当前车轮的旋转角度,并协同转向电机,可精确调整每个车轮的转向角度,从而实现车辆任方位行驶或转向。
14.进一步的,所述悬架连杆呈v型结构,且v型结构开口朝上,每组悬架连杆下方设有两个减震器。
15.进一步的,所述车架上对应承重轴的下方设有减震器固定轴,所述减震器一端与减震器固定轴铰接,另一端铰接悬架连杆上靠近端部位置。
16.进一步的,所述悬架连杆端部固定连接有安装板,所述安装板下表面与第一齿轮端面螺栓连接。
17.该车辆行驶于崎岖路面时,悬架连杆可绕承重轴晃动,以保持车轮与地面充分接触,同时通过减震器可保持车体平稳,并减小由于悬架连杆晃动造成的振动,使车辆行驶更稳定。
18.本实用新型同现有技术相比,具有如下优点:
19.1)本实用新型的行驶车中每个车轮的位置均采用可360
°
转向的车轮组件,通过角
度传感器监测车轮转向角度、通过转向电机控制车轮转动方向、通过行进电机驱动车轮行进,通过三者配合,可是实现行驶车多方向、多角度行驶,使行驶车更适用于一些地形狭小的环境。
20.2)本实用新型的行驶车采用悬架连杆将同侧车轮组件连接,使行驶过程中前后前后充分接触地面,并保持车体水平,更适用于崎岖地面,同时悬架连杆下方的减震器可吸收掉车轮晃动所带来的振动,保持车体平稳。
附图说明
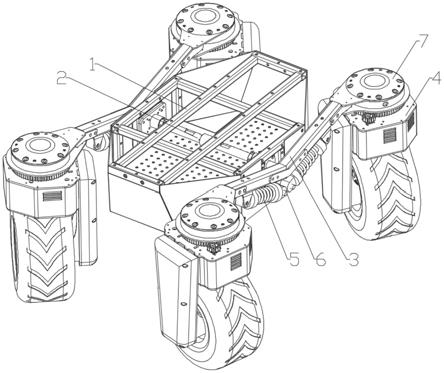
21.图1是本实用新型中一种多角度行驶车的立体结构图;
22.图2是本实用新型中一种多角度行驶车的侧视图;
23.图3是本发明多角度行驶车中车轮组件的正视图;
24.图4是图3中车轮组件a
‑
a处中的剖视图。
具体实施方式
25.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
26.实施例:
27.需理解的是,本实施例中为叙述方便,所声称的“上”“下”“内”“外”等方位是基于附图中“上”“下”“内”“外”方位进行叙述,仅为叙述方便,不能对本实用新型中得到结构产生限定作用。
28.此外,术语“第一”“第二”“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”“第二”“第三”的特征可以明示或者隐含地包括一个或者更多个该特征。
29.如图1
‑
2所示,本实施例中公开了一种多角度行驶车,包括车架1、承重轴2、悬架连杆3和车轮组件4,所述承重轴2固定连接在车架1中部;所述悬架连杆3设有两组,分别位于车架1两侧,且每组悬架连杆3的中部位置分别连接承重轴2端部。
30.所述悬架连杆3呈v型结构,且v型结构开口朝上,每组悬架连杆3下方设有两个减震器5。所述车架1上对应承重轴2的下方设有减震器固定轴6,所述减震器4一端与减震器固定轴6铰接,另一端铰接悬架连杆3上靠近端部位置,所述悬架连杆3端部固定连接有安装板7,呈v型结构的悬架连杆一方面可使得车架重心贴近地面,避免车架重心过高,易倾覆;另一方面通过减震器可避免悬架连杆与车架之间缓冲较小,造成车架震动。除此外更要的是,由于悬架连杆3中部位置连接承重轴2,为保持与承重轴2连接的车架1平衡,悬架连杆3下方通过两个减震器进行支撑,保持悬架连杆3以及车架1水平。
31.每组悬架连杆3的端部下方均连接有一组车轮组件4,如图3
‑
4所示,所述车轮组件4包括水平固定板401、竖向固定板402和车轮转向机构,所述水平固定板401与竖向固定板402垂直连接,所述车轮转向机构包括第一齿轮404、回转支承机构和转向电机405,所述第一齿轮404和回转支承机构均位于水平固定板401上方,且所述第一齿轮404和回转支承机构的轴线均垂直于水平固定板401,所述回转支承机构上端面与悬架连杆3端部固定连接,具体的,所述悬架连杆3的端部设有用于奖车轮组件4和悬架连杆3进行固定的连接盘7,所
述连接盘7侧面与悬架连杆3的端部焊接固定,所述连接盘7下端面与回转支承机构固定连接。
32.更具体的,所述回转支承机构包括第二齿轮403和支承固定环406,所述第二齿轮403呈环状结构,且所述第二齿轮403的外环面设有用于啮合的齿,所述第二齿轮403的上端面与连接盘7下端面采用螺栓固定连接;所述支承固定环406位于所述第二齿轮403的中部,且所述支承固定环406下端面与水平固定板401采用螺栓固定连接,所述支承固定环406与第二齿轮403的内环面采用间隙配合,所述支承固定环406与第二齿轮403沿周向旋转;所述第一齿轮404位于第二齿轮403外环面的侧方,所述第一齿轮404和第二齿轮404啮合;所述水平固定板401下表面固定连接有转向电机405,所述转向电机405的驱动轴穿过水平固定板401与第一齿轮404的轴心固定连接。
33.更具体的是,该回转支承机构运动过程中,当转向电机405接收到转向信号产生动作时,第一齿轮404和第二齿轮403产生相对位移,第二齿轮403由于和连接盘7固定,因此第一齿轮404沿第二齿轮403轴向回转运动,从而驱动与第一齿轮404连接的水平固定板401产生转动,进而使车轮组件4产生转向动作。而车轮组件4具体的转向角度可通过操控转向电机405的动作时间及动作速度进行控制。
34.为实现精准控制车轮组件4的转向角度,车轮组件4中设有用于监测车轮转向角度的角度传感器412,更具体的,所述角度传感器412位于支承固定环406的中部,为便于精准测量出车轮组件的转向角度,所述角度传感器412、支承固定环406和第二齿轮403同轴设置,为将角度传感器412进行固定,所述第二齿轮上端面设有第一支承架,所述角度传感器412上端面固定于第一支撑架下表面的中部位置;所述支承固定环406的下端面则固定连接有第二支承架,所述第二支承架与角度传感器412下端面固定连接。
35.所述角度传感器412用于测量支承固定环与第二齿轮403之间的旋转角度。通过每个车轮组件中安装的角度传感器可监测当前车轮的旋转角度,并协同转向电机,可精确调整每个车轮的转向角度,从而实现车辆任方位行驶或转向。更为具体的是,所述角度传感器412包括有第一旋转组件和第二旋转组件,其测量原理为通过第一旋转组件和第二旋转组件同轴设置时,两者之间产生的相对旋转位移,间接测量出车轮组件4的转向角度,对于两者如何测量出旋转位移,可采用现有技术,例如通过第一旋转组件和第二旋转组件位移改变电压或电流大小。所述角度传感器412的第一旋转组件与第一支承架固定连接,所述角度传感器412的第二旋转组件与第二支承架固定连接。
36.所述竖向固定板402上设有车轮转轴407,所述车轮转轴407的轴线垂直于竖向固定板402平面,且所述车轮转轴407贯穿安装在所述竖向固定板402上,所述车轮转轴407,沿车轮转轴的周向旋转。所述车轮转轴407上位于竖向固定板402内侧的一端固定连接车轮408,车轮转轴407上位于竖向固定板402外侧的一端固定连接第一链轮409。
37.所述车轮408上方设有行进电机410,所述行进电机410固定安装于竖向固定板402的内侧。所述行进电机410的驱动轴贯穿延伸在至竖向固定板402外侧,且行进电机410的驱动轴端部固定连接有第二链轮411。所述第一链轮409与第二链轮411的旋转平面竖向重合,第一链轮409和第二链轮411之间通过传动链连接,可将驱动电机的动力传递至车轮,从而保持车轮旋转及改变旋转方向。
38.该车辆行驶过程中具有多种行驶模式,尤其是可进行原地360
°
转向和360
°
方向平
移,传统的转向车辆,其通过控制车辆的两个前车轮进行转向,并且,当车辆进行平移时,其平移方向多为前后方向平移,左右方向则通过两个前车轮进行转向实现,其转弯半径较大,当车辆行驶在一些空间狭小的环境中,行驶动作受限,而本实施例中的车辆每个车轮均可进行360
°
转向,通过调整四个车轮转向角度,可使车辆原地进行360
°
转向,大幅降低转向半径需求,更适用于狭小环境。当前车辆进行平移时,则可通过将四个车轮转向角度调整一致,实现360
°
任意方向平移行驶。
39.该车辆行驶于崎岖路面时,悬架连杆3可绕承重轴2晃动,以保持车轮与地面充分接触,同时通过减震器5可保持车体平稳,并减小由于悬架连杆晃动造成的振动,使车辆行驶更稳定。
40.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

