1.本发明涉及一种用于小车的喷气辅助动力机构及其控制方法。
背景技术:
2.近年来,机器人小车的软硬件技术在竞赛、教学及科研等方面得到日益广泛的关注。一方面,机器人小车的应用可拓展到未知环境搜救、机器人路径规划、高速运动控制及自动驾驶等领域。同时,其还可以为大学生、创客、技术爱好者等开展人工智能学习、培训提供一个多层次、综合性的基础平台。
3.为提升小车的移动速度,现有机器人小车普遍对其重量进行严格限制,但也带来了轮胎的抓地力偏小,底盘稳定性难以保证的问题。为在保证机器人小车运动稳定性的同时提高其机动能力,国内外研究中推出一系列改进设备。例如,发明专利cn 113071576 a《反推力吸附的高速移动机器人》引入前旋翼和后旋翼结构,以反推力将机器人吸附于地面,增加机器人运动稳定性从而使其能够在更快速度下运动,但所提出结构中反推力主要为垂直方向,仍然无法直接提高机器人机动能力。因此有必要提出一种具有辅助动力的机器人小车,既能通过大气压增强机器人的抓地能力,又能通过喷气式结构为机器人小车添加辅助动力,提高其稳定性的同时增强机动能力。
技术实现要素:
4.本发明提供了一种带有喷气辅助动力机构的小车及其控制方法,以解决机动能力提升困难,且抓地力偏小,底盘稳定性难以保证的问题。本发明所采用的技术方案如下:
5.一种带有喷气辅助动力机构的小车,包括用于驱动轮毂和轮胎套的动力机构、喷气辅助动力机构,动力机构包括主电机,其特征在于,所述的喷气辅助动力机构包括开设有通孔的底盘、设置在底盘通孔处的抽气腔、空气输送管11、风扇电机12、气动扇叶13及喷气腔14,喷气腔14的后部开设有喷气孔143,气动扇叶13设置在喷气腔14的后部,在风扇电机12的带动下,气动扇叶将板下的空气从底盘通孔抽入抽气腔,再经由空气输送管进入喷气腔并从喷气孔143喷出,从而使小车在大气压的作用下向下贴紧,同时向后喷射空气所带来反作用力对小车起到辅助动力的作用。
6.进一步地,所述的抽气腔包括板下半封闭腔9和板上抽气腔10两部分,两者通过底盘通孔相连通,板下半封闭腔9设置有面向板下的开口。
7.进一步地,所述的小车包括一个位于中轴线上的喷气腔14,板上抽气腔10通过两路空气输送管11分别连通到喷气腔14的两侧。
8.进一步地,所述的喷气辅助动力机构包括两套分设在小车中轴线两侧的底板通孔、抽气腔、喷气腔14和气动扇叶13,两个板上抽气腔10分别通过一路空气输送管11连通到两个喷气腔14。
9.进一步地,所述的风扇电机12采用高速空心杯直流电机。
10.本发明同时提供上述小车的控制方法:设定速度阈值,在小车的速度低于速度阈
值时不使用喷气辅助动力机构,风扇电机不运行;当小车速度超过速度阈值时,风扇电机运行闭环pid控制,输入量为设定转速,以编码器测速为负反馈,风扇电机与驱动小车动力机构协同配合。
11.进一步地,对于单底盘通孔的小车,在转弯时,主电机转速降低,风扇电机仍处于高转速状态以保证其抓地能力;对于双底盘通孔的小车,当向左转弯时,主电机和左侧风扇电机转速降低,右侧风扇电机仍处于高转速状态,即增强其右轮速度以方便转向,并防止小车侧翻;当向右转弯时,根据相同的原理,主电机和右侧风扇电机转速降低,左侧风扇电机则仍处于高转速状态。
12.本发明提出的小车具备以抽气和喷气为基础的辅助动力系统,小车底板设有通孔。一方面机器人小车能通过将底板下的空气抽出,从而增大车下的大气压以增强小车的抓地能力,又能通过向后喷气为小车添加辅助动力,提高其稳定性的同时增强机动能力。
附图说明
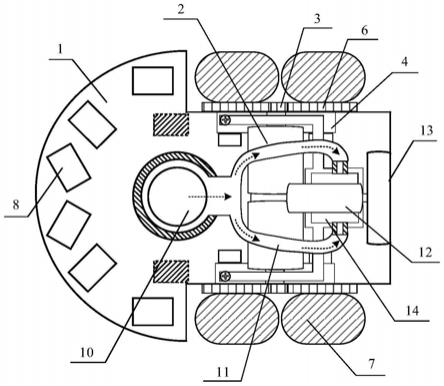
13.图1为:本发明案例1的一种装设喷气辅助动力机构机器人小车的俯视图
14.图2为:本发明案例1的一种装设喷气辅助动力机构机器人小车的仰视图
15.图3为:本发明案例1的喷气腔结构示意图;
16.图4为:本发明案例2的一种装设喷气辅助动力机构机器人小车的俯视图
17.图5为:本发明案例2的一种装设喷气辅助动力机构机器人小车的仰视图
18.图6为:本发明案例2的喷气腔结构示意图
19.图7为:本发明的喷气腔剖面示意图
20.图8为:本发明案例1的板上抽气腔结构示意图
21.图9为:本发明案例2的板上抽气腔结构示意图
22.图10为:本发明的动力机构结构示意图
23.图11为:本发明的控制电路框图
24.附图说明如下:
25.1控制电路板、2主电机、3传送齿轮、4轮毂支架、5金属轴承、6轮毂、7轮胎套、8数字红外传感器、9半封闭腔、10板上抽气腔、11空气输送管、12风扇电机、13气动扇叶、14喷气腔、141电机固定槽、142空气输入接口、143喷气孔、101空气输送管接口、102固定支架、103右腔室、104左腔室
具体实施方式
26.下面结合附图及具体实施过程对本发明作进一步具体详细描述。
27.实施例1:
28.如图1所示的一种装设喷气辅助动力机构机器人小车的俯视图,由控制电路板1、驱动机构、视觉机构及辅助动力机构四个部分组成。所述控制电路板1同时充当机器人的底盘,且开设有通孔。动力机构包括主电机2、传送齿轮3、轮毂支架4、金属轴承5、轮毂6及轮胎套7,主电机2共有两台并位于控制电路板上方,传送齿轮3、轮毂支架4、轮毂6及轮胎套7位于控制电路板两侧。视觉机构包括六组独立设置且相互之间无干扰的数字红外传感器8,装设于控制电路板前侧。其中,每组数字红外传感器包括红外发射管和红外接收管,选型标准
为敏感光线波长接近。红外发射管负责发射红外光,若前方有障碍物,则红外线会被反射至红外接收管,被红外接收管所接受。每组红外发射管和红外接收管相互之间呈垂直叠放,六组数字红外传感器8分别朝向机器人的左侧前方、左前方、左方、右方、右前方及右侧前方,对各个方位的障碍物进行测距。
29.辅助动力机构包括板下半封闭腔9、板上抽气腔10、空气输送管11、风扇电机12、气动扇叶13及喷气腔14。其中,板下半封闭腔9位于控制电路板下方;板上抽气腔10、空气输送管11、风扇电机12、气动扇叶13及喷气腔14位于控制电路板上方。空气输送管11共有两路,包括左输送管和右输送管,其起点都位于板上抽气腔10的后部,并分别通过左侧与右侧主电机2上方,从而接入喷气腔14。在风扇电机带动下,气动扇叶可以将通孔与地面之间板下半封闭腔的空气抽入板上抽气腔,通过两侧的空气输送管进入喷气腔并向后喷出,从而使机器人在大气压的作用下紧贴地面,同时向后喷射空气所带来反作用力可以对机器人小车起到辅助动力的作用。
30.如图2所示一种装设喷气辅助动力机构机器人小车的仰视图,板下半封闭腔9位于控制电路板1通孔正下方,设有粘贴于控制电路板1,并与地面接触的塑料窗帘91,塑料窗帘91、地面与控制电路板1形成半封闭空间,与外界有一定阻隔性,因此当空气被快速抽入板上抽气腔10时,板下半封闭腔9内大气压可以显著下降。
31.如图3所示喷气腔结构示意图,喷气腔14前侧设有电机固定槽141,两侧设有空气输入接口142,后侧设有喷气孔143。空气输入接口142共有2个,用于接入两路空气输送管1,风扇电机12采用高速空心杯直流电机,装设于电机固定槽141。气动扇叶13的夹角为30度,且为曲面结构,位于喷气腔14后部,扇叶直径略小于喷气孔143直径。
32.如图7所示喷气腔剖面示意图,风扇电机12呈水平放置且轴承正对于机器人小车后方,风扇电机12安装于风扇电机12的轴承。当风扇电机12带动气动扇叶13高速转动时,空气从空气输入接口142进入喷气腔14,并从喷气孔143向后喷出。
33.如图8所示板上抽气腔结构示意图,板上抽气腔10后部设有空气输送管接口101,且有3支带有螺丝孔的固定支架103,每支固定支架103之间的角度相差60
°
。板上抽气腔10通过3个螺丝固定于控制电路板1通孔的正上方,与控制电路板1紧密贴合,并通过两路空气输送管11与喷气腔14连接。
34.如图10所示动力机构结构示意图,主电机2采用高速直流空心杯电机,并安装于轮毂支架4。传动齿轮3固定于主电机2的轴承,轮胎套7套于轮毂6外侧。轮毂6内侧呈齿轮状,与传动齿轮3相啮合。传动齿轮3固定在主电机2上,通过传动齿轮3带动前后轮毂6转动,即可以起到传动的效果,也可以起到减速的效果。轮毂6中心装设有金属轴承5,金属轴承5与轮毂支架4相连接,前部金属轴承5可以通过轴套进行固定,前部金属轴承5则安装磁铁支架,即可以用于固定,也可以安装磁铁用于测速。轮毂支架4对整个动力机构起到固定作用。
35.如图11所示控制电路框图,控制电路板1为四层板,中间两层为电源层和地层,顶层和底层主要为功能电路,包括主控制电路、人机交互电路、电机驱动电路、红外对管电路、陀螺仪电路、调试接口电路及供电电路。
36.其主控制电路与人机交互电路、电机驱动电路、红外对管电路、陀螺仪电路、调试接口电路及供电电路相连接。主控制电路是机器人小车的控制中心,并接受人机交互交互电路的指令,同时处理红外对管电路与陀螺仪电路的信号。
37.人机交互电路包括按键与led,按键用于机器人的启停和运行模式的调整,led用于展示当前机器人小车的运行模式。电机驱动电路与两台主电机及风扇电机相连接,根据组控制电路的信号对各电机进行驱动和转速控制。红外对管电路与视觉机构相连接,由pwm发射电路和带通滤波器接收电路两部分组成,其中pwm发射电路与红外发射管相连接,带通滤波器与红外接收管相连接,起到滤除干扰的作用。陀螺仪电路的主要作用是通过陀螺仪测量小车当前姿态与角度,为小车的姿态调整与后续运动控制提供参考依据。供电电路的主要作用是机器人小车内各功能电路和模块提供稳定电源。
38.由于速度较低时小车运行稳定性较好,且缺乏添加辅助动力的必要性,在机器人小车的速度低于阈值时不使用喷气辅助动力机构,风扇电机12不运行;当机器人小车速度超过阈值时,风扇电机12运行闭环pid控制,输入量为设定转速,以编码器测速为负反馈,其实现状态与期望状态出现偏差时,主控制电路根据这种偏差发出新的指令以纠正偏差,抵消干扰。在使用喷气辅助动力机构的情况下,风扇电机12与驱动机器人小车轮胎的主电机2协同配合。当直线行驶时,主电机2和风扇电机12都处于高转速状态以提高机器人小车机动能力;当转弯时,主电机2转速适当降低,风扇电机12仍处于高转速状态以保证其抓地能力。
39.实施例2:
40.如图4所示的一种装设喷气辅助动力机构机器人小车的俯视图,由控制电路板1、驱动机构、视觉机构及辅助动力机构四个部分组成。其中,驱动机构和视觉机构和案例1完全相同。所述控制电路板1同时充当机器人的底盘,设有左右两个通孔。辅助动力机构包括板下半封闭腔9、板上抽气腔10、空气输送管11、风扇电机12、气动扇叶13及喷气腔14。所述喷气腔14共有两个,分别单独配备风扇电机12和气动扇叶13。板上抽气腔10共有两个腔室,空气输送管11共有两路,包括左输送管和右输送管,其起点分别为板上抽气腔10的两个腔室,并分别接入2个喷气腔14。
41.如图5所示的一种装设喷气辅助动力机构机器人小车的仰视图,板下半封闭腔9位于控制电路板1下方,并设有5片塑料窗帘91,与地面及控制电路板1形成两个半封闭空间,分别位于两个通孔正下方。
42.如图6所示的喷气腔结构示意图,仅设有1个空气输入接口142,其余与案例1完全相同。
43.如图9所示的板上抽气腔结构示意图,由2个空气输送管接口101、3支固定支架102、右腔室103及左腔室104组成。右腔室103和左腔室104分别位于控制电路板1两个通孔正上方,并在后方分别设有空气输送管接口101。板上抽气腔10通过3个螺丝固定于控制电路板1上方,与控制电路板1紧密贴合,并通过两路空气输送管11与喷气腔14连接。
44.由于速度较低时小车运行稳定性较好,且缺乏添加辅助动力的必要性,在机器人小车的速度低于阈值时不使用喷气辅助动力机构,两个风扇电机都12不运行;当机器人小车速度超过阈值时,两个风扇电机12运行并采用闭环pid控制,输入量为设定转速,以编码器测速为负反馈,其实现状态与期望状态出现偏差时,主控制电路根据这种偏差发出新的指令以纠正偏差,抵消干扰。在使用喷气辅助动力机构的情况下,两个风扇电机12与驱动机器人小车轮胎的主电机2协同配合。当直线行驶时,主电机2和两个风扇电机12都处于高转速状态以提高机器人小车机动能力;当向左转弯时,主电机2和左侧风扇电机12转速适当降低,右侧风扇电机12仍处于高转速状态,即增强其右轮速度以方便转向,并防止机器人小车
侧;当向右转弯时,根据相同的原理,主电机2和右侧风扇电机12转速适当降低,左侧风扇电机12则仍处于高转速状态。
45.以上所述,仅为本发明的较佳实施例,并不用以限制本发明,凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同替换和改进,均应包含在本发明技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

