1.此处所公开的技术涉及一种例如用于汽车自动驾驶的汽车用运算系统。
背景技术:
2.最近,利用使用神经网络进行的深度学习来识别车内外环境的技术也应用到汽车上了。
3.例如,专利文献1公开了一种推测装置,推测乘员相对于车辆装备的状态。该推测装置包括存储部和处理部,该存储部中存储有通过利用神经网络进行的深度学习构筑的模型;含有装备的图像输入该处理部,该处理部使用模型推测乘员的状态并输出表示乘员的特定部位即骨骼位置的第一信息和表示乘员相对于装备的状态的第二信息。
4.专利文献1:日本公开专利公报特开2018-132996号公报
技术实现要素:
-发明要解决的技术问题-
5.最近,全国正在推进自动驾驶系统的开发。自动驾驶系统,一般是通过摄像头等获取车外环境信息,根据获取到的车外环境信息计算汽车应行驶的路径。在该路径的计算过程中,车外环境的认定很重要,人们已经在进行将深度学习用于该车外环境的认定上这样的研发工作。
6.此处,例如在汽车功能安全标准(iso 26262)中,提出了以asil(automotive safety integrity level:汽车安全完整性等级)作为评价危害的指标,这也是负责自动驾驶的运算装置中的功能安全的软件设计的理念,这还能够被应用到构成程序的多个模块的功能安全的设计上。进行设计阶段的开发时,要求达到asil中的asil-a到asil-d各功能安全等级。
7.相对于此,利用深度学习进行的车外环境的认定和路径的计算还处于发展阶段,大致停留在asil-b这一等级上。因此,为了在具有自动驾驶功能的汽车中大致达到asil-d这一等级的功能安全等级,仅由利用深度学习的功能构成运算装置是不够的。
8.此处公开的技术正是为解决上述技术问题而完成的,其目的在于:提高具有利用深度学习之功能的汽车用运算系统的功能安全等级。-用以解决技术问题的技术方案-
9.为了解决所述问题,此处公开的技术以一种安装在汽车上的汽车用运算系统为对象,且采用以下构成。该汽车用运算系统具有主运算装置和备用运算装置,所述主运算装置具有第一路径生成部,所述第一路径生成部根据来自获取车外环境信息的信息获取装置的输出,利用深度学习推测包括道路和障碍物的车外环境,并根据推测出的车外环境生成道路上避开障碍物的第一路径,所述主运算装置决定汽车沿该第一路径行驶时的目标运动,并将用于实现该目标运动的控制信号输出给生成驱动力、制动力以及转向角的各执行装置,所述备用运算装置具有停车路径生成部,所述停车路径生成部根据来自所述信息获取
装置的输出,生成供行驶中的汽车行驶到符合预设基准的停车位置停车的行驶路径即第三路径,所述备用运算装置决定用于使汽车沿该第三路径行驶的备用目标运动,并将用于实现该备用目标运动的备用控制信号输出给所述各执行装置,当所述主运算装置发生故障时,该汽车用运算系统将所述备用控制信号优先于所述控制信号输出给所述各执行装置。
10.根据该构成方式,因为当主运算装置发生故障时,也能够通过将备用控制信号优选于控制信号输出给各执行装置,使汽车移动到符合预设基准的停车位置,所以例如能够使汽车在安全的位置紧急停车等。也就是说,能够实现用于确保安全的安全功能,进而能够提高功能安全等级。
11.在所述汽车用运算系统的一实施方式中,所述主运算装置具有第二路径生成部,所述第二路径生成部根据来自所述信息获取装置的输出,不利用深度学习而按照规定的规则识别包括道路和障碍物的车外的对象物,根据识别出的车外对象物确定道路上避开障碍物的安全区域,并生成在该安全区域内行驶的第二路径,当所述第一路径脱离了所述安全区域时,所述主运算装置决定汽车沿所述第二路径行驶时的目标运动来代替决定汽车沿所述第一路径行驶时的目标运动,并将用于实现该目标运动的控制信号输出给所述各执行装置。
12.根据该构成方式,除了通过深度学习推测车外环境以外,还按照规定的规则认定车外的对象物。此处所说的规定的规则是现有技术在汽车等中所采用的人与物等的认定方法,基于规定的规则的对象物认定功能达到相当于asil-d的功能安全等级。因此,根据对象物认定部的结果计算出的安全区域可以说是安全性较高的区域。
13.并且,当根据利用深度学习推测出的车外环境计算出的第一路径脱离安全区域时,目标运动决定部将用于实现汽车沿第二路径行驶时的目标运动的控制信号作为主运算装置的输出,输出给各执行装置。这样一来,在具有利用深度学习的功能的运算装置中,能够提高功能安全等级。
14.在所述汽车用运算系统的一实施方式中,所述主运算装置包括区域设定部,所述区域设定部根据来自所述信息获取装置的输出,不利用深度学习而按照规定的规则识别包括道路和障碍物的车外的对象物,根据识别出的车外的对象物设定道路上避开障碍物的安全区域,所述第一路径生成部将所述第一路径设定为通过所述安全区域。
15.这样一来,因为由第一路径生成部生成的路径也通过根据规定的规则设定的安全区域,所以能够提高功能安全等级。-发明的效果-
16.正如以上说明的那样,根据此处公开的技术,能够提高具有利用深度学习的功能的运算装置的功能安全等级。
附图说明
17.图1是示出第一实施方式所涉及的汽车用运算系统的功能构成的方框图;图2是示出安装有运算系统的汽车的构成例的图;图3是示出由运算系统设定的行驶路径之一例的图;图4是由第一运算部设定的安全区域和由第二运算部设定的安全区域的比较图;图5是示出根据通过深度学习推测出的车外环境计算出的候选路径与安全区域之
间的关系之一例的图;图6是示出根据通过深度学习推测出的车外环境计算出的候选路径与安全区域之间的关系的另一图;图7是示出运算系统的工作处理的流程图;图8是决定汽车的驾驶路径时的流程图;图9是决定汽车的驾驶路径时的流程图;图10a是示出导入实际系统中的导入例之功能构成的方框图;图10b是是示出导入实际系统中的导入例之功能构成的方框图。
具体实施方式
18.下面,参照附图对示例性实施方式进行详细的说明。
19.(第一实施方式)图1示出本第一实施方式所涉及的汽车用运算系统sy(以下也简称为运算系统sy)的构成。运算系统sy例如是安装在四轮汽车1上的运算系统。汽车1是能进行手动驾驶、辅助驾驶以及自动驾驶的汽车。手动驾驶为根据驾驶员对油门等的操作使汽车1行驶;辅助驾驶为辅助驾驶员的操作来使汽车1行驶;自动驾驶为在没有驾驶员操作的情况下使汽车1行驶。需要说明的是,在下述说明中,为了将安装有运算系统sy的汽车1与其他车辆区分开来,有时称之为本车辆1。
20.运算系统sy根据来自多个传感器等的输出,决定汽车1的目标运动,控制车载装置工作。
21.车外信息获取装置m1由向运算系统sy输出汽车1的车外环境信息的传感器等构成,例如包括:(1)设在汽车1的车身等上且拍摄车外环境的多个摄像头50;(2)设在汽车1的车身等上且检测车外的人与物等的多个雷达51;(3)检测汽车1的绝对速度的车速传感器52;(4)检测对汽车1的油门踏板的踩踏量的油门开度传感器53;(5)检测汽车1的方向盘的旋转角度(方向盘转角)的方向盘转角传感器54;(6)检测汽车1的制动踏板的踩踏量的制动传感器55;(7)利用全球定位系统(global positioning system:gps)检测汽车1的位置(车辆位置信息)的位置传感器56。
22.各摄像头50例如分别布置成能够在水平方向360
°
的范围内对汽车1的周围进行拍摄。各摄像头50拍摄表示车外环境的光学图像并生成图像数据。各摄像头50将生成的图像数据输出给主运算装置100。摄像头50是获取车外环境信息的车外信息获取装置之一例。
23.与摄像头50一样,各雷达51分别布置成将检测范围扩大到汽车1周围水平方向360
°
。雷达51的种类没有特别限定,例如能够采用毫米波雷达或红外线雷达。雷达51是获取车外环境信息的车外信息获取装置之一例。
24.车内信息获取装置m2由向运算系统sy输出汽车1的车内环境信息的传感器等构成,包括:(1)设在汽车1的车内反射镜或仪表板等上且拍摄驾驶员的表情、姿势以及车内环境等的车内摄像头58;(2)获取驾驶员的生物信息(体温、心率、呼吸等)的车内传感器59。
25.运算系统sy的控制对象例如包括发动机10、制动器20、转向器30以及变速器40。在下述说明中,为了便于说明,将运算系统sy的控制对象(包括发动机10、制动器20、转向器30以及变速器40)统称为执行装置类ac。
26.发动机10是动力驱动源,包括内燃机(汽油发动机、柴油发动机)。当需要使汽车1加速或减速时,运算系统sy向发动机10输出发动机输出变更信号。手动驾驶时,根据驾驶员对油门踏板的操作量等控制发动机10;辅助驾驶和自动驾驶时,根据从运算系统sy输出的表示目标运动的目标运动信号(以下简称为目标运动信号)控制发动机10。需要说明的是,发动机10的旋转轴与利用发动机10的输出发电的发电机相连结,省略图示。
27.制动器20在此处为电动制动器。当需要使汽车1减速时,运算系统sy向制动器20输出制动要求信号。接收到制动要求信号的制动器20根据该制动要求信号使制动执行器(brake actuator)(省略图示)工作,从而使汽车1减速。手动驾驶时,根据驾驶员对制动踏板的操作量等控制制动器20;辅助驾驶和自动驾驶时,根据从运算系统sy输出的目标运动信号控制制动器20。
28.转向器30在此处为eps(electric power steering:电动助力转向器)。当需要改变汽车1的前进方向时,运算系统sy向转向器30输出转向方向变更信号。手动驾驶时,根据驾驶员对转向盘(所谓的方向盘)的操作量等控制转向器30;辅助驾驶和自动驾驶时,根据从运算系统sy输出的目标运动信号控制转向器30。
29.变速器40是有级变速器。主运算装置100根据应输出的驱动力,向变速器40输出档位变更信号。手动驾驶时,根据驾驶员对变速杆的操作和驾驶员对油门踏板的操作量等控制变速器40;辅助驾驶和自动驾驶时,根据由主运算装置100计算出的目标运动控制变速器40。
30.手动驾驶时,运算系统sy将基于油门开度传感器53等的输出的控制信号输出给发动机10等。另一方面,辅助驾驶时和自动驾驶时,运算系统sy设定汽车1的行驶路径,向发动机10等输出控制信号,以便使汽车1在该行驶路径上行驶。
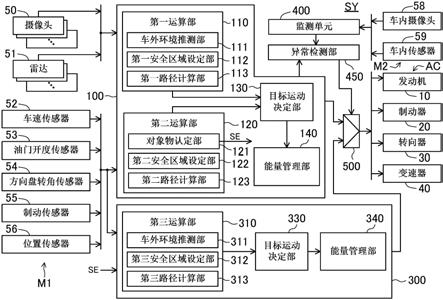
31.<1.运算系统的构成>如图1所示,运算系统sy包括主运算装置100、备用运算装置300、监测部400、异常检测部450以及选择装置500。
32.进行辅助驾驶和自动驾驶时,主运算装置100根据来自车外信息获取装置m1的输出,决定汽车1的目标运动,输出用于使执行装置类ac按该目标运动工作的控制信号。
33.备用运算装置300根据来自车外信息获取装置m1的输出生成安全停车路径(相当于第三路径),决定用于使汽车1在该安全停车路径上行驶的目标运动即备用目标运动。备用运算装置300还输出用于使执行装置类ac按该备用目标运动工作的控制信号即备用控制信号。此处,安全停车路径是指供行驶中的汽车行驶到符合预设基准的安全停车位置tp停下来的行驶路径。安全停车位置tp例如只要是汽车1能够安全停下来的位置便没有特别限定,例如有道路上汽车1未通过的区域即无车辆区域、路肩8(参照图4)等。备用目标运动例如包括下述用途的目标运动:当由后述的异常检测部45检测到异常时1)立即将车速降低到慢速行驶水平,一边警示鸣笛一边缓慢行驶到安全车置p;(2)根据周围的交通量尽量不妨碍周围地,并使本车辆1行到安全停车位置tp。
34.主运算装置100和备用运算装置300分别是由一个或多个芯片构成的微处理器,且具有cpu和存储器等。这样一来,能够降低二者同时发生故障的风险。在图2的构成例中,主运算装置100包括处理器103和存储器104,备用运算装置300包括处理器303和存储器304。存储器104中存储有能由处理器103执行的软件即模块。通过由处理器103执行存储在存储
器104中的各模块,来实现图1所示的主运算装置100的各部分的功能。存储器104中还存储有在主运算装置100使用的模型的数据。存储器304中存储有能由处理器303执行的软件即模块。通过由处理器303执行存储在存储器304中的各模块来实现图1所示的备用运算装置300的各部分的功能。需要说明的是,处理器103、处理器303、存储器104以及存储器304均可为多个。
35.需要说明的是,在图1中,示出的是用于发挥本实施方式所涉及的功能(后述的路径生成功能)的构成,并不是示出主运算装置100和备用运算装置300所具有的所有功能。
36.监测部400根据来自车内信息获取装置m2的输出,监测驾驶员的状态并将其结果输出给异常检测部450。
37.异常检测部450构成为能够检测出主运算装置100的故障。主运算装置100的故障检测方法没有特别限定,例如能够应用迄今已知的硬件冗余电路(例如双核锁步等)、芯片内运算结果的监测、表示芯片内异常状态的标志寄存器的监测、芯片内测试电路(lbist(logic build
‑
in self
‑
test)电路)、芯片间的相互监测等。异常检测部450还构成为能够根据从车内信息获取装置m2接收到的驾驶员信息,检测驾驶员的异常情况。
38.选择装置500例如由选择器电路实现,根据异常检测部450的检测结果,选择从主运算装置100输出的控制信号或从备用运算装置300输出的备用控制信号中的任一者,并将选择信号输出给该汽车1的执行装置类ac。具体而言,正常驾驶时,选择装置500选择并输出从主运算装置100输出的控制信号,而当检测到主运算装置100或驾驶员中的一者出现异常时,选择装置500则选择并输出从备用运算装置300输出的备用控制信号。
39.下面,进一步对运算系统sy的各构成要素进行具体的说明。
40.-1-1.主运算装置的构成-主运算装置100包括第一运算部110、第二运算部120、目标运动决定部130以及能量管理部140。
41.第一运算部110具有下述功能:利用深度学习推测车外环境,生成基于推测出的车外环境的路径即第一路径。也就是说,第一运算部110包含作为第一路径生成部的功能。具体而言,第一运算部110包括车外环境推测部111、第一安全区域设定部112以及第一路径计算部113。需要说明的是,关于“第一路径”,会在后述的“2.运算系统的工作情况”中举出具体例进行说明。
42.车外环境推测部111根据来自摄像头50和雷达51的输出,通过采用深度学习进行的图像识别处理来推测车外环境。具体而言,车外环境推测部111根据来自摄像头50的图像数据通过深度学习构筑物体识别信息,并整合该物体识别信息与雷达的定位信息来绘制表示车外环境的3d地图。此外,将基于深度学习而做出的对各物体行为的预测等与该3d地图相整合而生成环境模型。深度学习中例如使用多层神经网络(dnn:deep neural network:深度神经网络)。多层神经网络例如有cnn(convolutional neural network:卷积神经网络)。
43.第一安全区域设定部112针对由车外环境推测部111推测出的车外环境(例如3d地图)设定第一安全区域sa1(参照图4)。使用利用深度学习构筑的模型将该第一安全区域sa1设定为本车辆能通过的区域。模型通过以下方法构筑:例如,根据驾驶员过去的驾驶历史等对事先构筑的汽车1的每个车型的模型进行再构筑即可。需要说明的是,第一安全区域sa1
是指所谓的自由空间,例如是在道路上不存在其他车辆和行人等动态障碍物及中央分隔带和中央警示柱等静态障碍物的区域。第一安全区域sa1可以包括能紧急驻车的路肩8的空间。
44.第一路径计算部113利用强化学习计算通过由第一安全区域设定部112设定的第一安全区域sa1内的第一候选路径。强化学习具有下述功能:给一系列模拟结果(此处为候选路径)设定评价函数,对符合某个目的的模拟给予较高的评价;对不符合该目的的结果给予较低的评价,由此学习到符合目的的候选路径。实际的计算方法后述。
45.第二运算部120具有下述功能:根据来自车外信息获取装置m1(例如,摄像头50、雷达51)的输出,不利用深度学习而按照规定的规则识别车外的物体,并根据识别出的车外的物体确定安全区域。而且,第二运算部120具有下述功能:生成通过已确定下来的该安全区域的第二路径。也就是说,第二运算部120包含作为第二路径生成部的功能。具体而言,第二运算部120包括对象物认定部121(相当于物体识别部)、第二安全区域设定部122(相当于安全区域确定部)以及第二路径计算部123。
46.对象物认定部121根据对象物认定规则(相当于规定的规则)认定对象物。对象物例如是存在于道路上的行驶车辆、驻车车辆、行人等。对象物认定部121对本车辆与对象物之间的相对距离和相对速度也进行认定。此外,对象物认定部121根据来自摄像头50和雷达51的输出对车行道(包括分界线等)也进行认定。
47.第二安全区域设定部122将第二安全区域sa2设定为能够避免与对象物认定部121已认定出的对象物发生碰撞的区域。该第二安全区域sa2例如是根据规定的规则设定的,该规则例如是将对象物周围几米的范围视为无法避开范围等。第二安全区域设定部122构成为能考虑着行驶车辆的速度和行人的速度设定第二安全区域sa2。需要说明的是,“对象物认定规则”和“规定的规则”是将现有技术在汽车等中所采用的人与物等的认定方法及其避开方法纳入规则中而得到的,达到相当于asil-d的功能安全等级。此外,与第一安全区域sa1一样,第二安全区域sa2是指所谓的自由空间,例如是在道路上不存在其他车辆和行人等动态障碍物及中央分隔带和中央警示柱等静态障碍物的区域。第二安全区域sa2可以包括能紧急驻车的路肩8的空间。
48.第二路径计算部123计算能通过由第二安全区域设定部122设定的第二安全区域sa2内的第二路径。实际的计算方法后述。
49.目标运动决定部130接收来自第一、第二运算部110、120的输出并决定汽车1的目标运动。目标运动决定部130尤其是接收第一、第二安全区域sa1、sa2的信息、第一候选路径以及第二候选路径的信息来决定汽车1的目标运动。具体而言,目标运动决定部130设定汽车1应行驶的路径,决定要求执行装置类ac(主要是发动机10、制动器20、转向器30、变速器40)工作的工作要求量(例如,发动机扭矩和制动执行器的工作量等),以便使汽车1在该路径上行驶。
50.能量管理部140计算对执行装置类ac的控制量,以便在达到由目标运动决定部130决定下来的目标运动以后使能量效率达到最佳。具体举例的话,例如,能量管理部140计算在实现了由目标运动决定部130决定下来的发动机扭矩后使燃料消耗量最少那样的进排气门(省略图示)的开关时刻和燃料喷射器(省略图示)的燃料喷射时刻等。
51.由目标运动决定部130决定下来的目标运动数据和由能量管理部140计算出的控
制量数据作为用于控制执行装置类ac的控制信号输出给选择装置500。
52.-1-2.备用运算装置的构成-备用运算装置300包括备用运算部310、目标运动决定部330以及能量管理部340。
53.备用运算部310具有下述功能:根据来自车外信息获取装置m1的输出,生成行驶到安全停车位置tp的路径即安全路径。也就是说,备用运算部310包含作为停车路径生成部的功能。具体而言,备用运算部310包括车外环境推测部311、第三安全区域设定部312以及安全路径计算部313。需要说明的是,关于“安全路径”,会在后述的“2.运算系统的工作情况”中举出具体例进行说明。
54.车外环境推测部311利用由第二运算部120中的对象物认定部121认定出的对象物数据,推测车外环境。车外环境推测部311还根据来自对象物认定部121的输出,对行车道(包括分界线等)、汽车1能够安全停车的位置即安全停车位置tp也进行认定。安全停车位置tp例如只要是汽车1能够安全停车的位置便没有特别限定,例如有路肩8(参照图4)、道路上汽车1未通过的区域即无车辆区域等。需要说明的是,例如当确认出在本车辆1周围几米范围内无其他车辆时,车辆1当前的位置或比当前的位置略靠前一点的位置都可能成为安全停车位置tp。当要将汽车1停在上述位置时,例如,一边使警示灯等警示装置工作,一边让汽车1停下来。
55.第三安全区域设定部312将第三安全区域sa3设定为能够避免与由车外环境推测部311认定出的对象物发生碰撞的区域。该第三安全区域sa3是根据例如将对象物周围几米范围视为无法避开范围等规定的规则设定的。需要说明的是,第三安全区域设定部312也可以采用与第二安全区域设定部122相同的构成。在此情况下,有时会把第三安全区域sa3和第二安全区域sa2指定为同一个区域。此外,也可以由一个具有相同构成的电路实现第三安全区域设定部312第二安全区域设定部122。不过,从提高抗故障性的观点出发,优选将第二安全区域设定部122和第三安全区域设定部312分开设置。此处的“规定的规则”也与上述“规定的规则”一样,达到相当于asil-d的功能安全等级。
56.安全路径计算部313计算通过由第三安全区域设定部312设定的第三安全区域sa3内且到安全停车位置tp的行驶路径即安全路径rs。实际的计算方法后述。
57.目标运动决定部330接收来自备用运算部310的输出并决定汽车1的目标运动。目标运动决定部330尤其是接收第三安全区域sa3和安全停车位置tp的信息来决定汽车1的目标运动。具体而言,目标运动决定部330设定汽车1要到达安全停车位置tp应行驶的安全路径,决定要求执行装置类ac(主要是发动机10、制动器20、转向器30)工作的工作要求量(例如,发动机扭矩和制动执行器的工作量等),以便使汽车1在该安全路径上行驶。
58.能量管理部340一边考虑着本车辆1和驾驶员有无异常状态等,一边计算对执行装置类ac(后述的发动机10等)的控制量,以便在达到由目标运动决定部330决定下来的目标运动后,最安全且能量效率达到最佳。具体举例的话,例如,能量管理部140计算在实现了由目标运动决定部130决定下来的发动机扭矩后使燃料消耗量最少那样的进排气门(省略图示)的开关时刻和燃料喷射器(省略图示)的燃料喷射时刻等。此外,例如,在驾驶员存在异常的情况下,能量管理部140会计算出尽可能减轻驾驶员负担那样的对执行装置类ac的控制方法。
59.由目标运动决定部130决定下来的目标运动数据和由能量管理部140计算出的控
制量数据作为用于控制执行装置类ac的控制信号输出给选择装置500。
60.<2.运算系统的工作情况>下面,参照附图对运算系统的工作情况进行说明。
61.-2-1.第一路径、第二路径的计算-此处,参照图3,对第一路径和第二路径的计算方法进行说明。如前所述,第一路径和第二路径都是由主运算装置100计算出的。
62.在图3的例子中,省略第一安全区域sa1的图示,要计算的第一路径是通过第一安全区域sa1内的路径。需要说明的是,在汽车1的行驶模式为辅助驾驶或自动驾驶时进行第一路径的计算;在手动驾驶时不进行第一路径的计算。
63.首先,如图3所示,第一路径计算部113根据车行道信息执行栅格点设定处理。在栅格点设定处理中,主运算装置100首先确定行车道5的形状(即行车道5的延伸方向、行车道宽度等),在行车道5上设定包括栅格点gn(n=1、2
……
n)的栅格区域rw。
64.栅格区域rw沿车行道5从本车辆1的周围向本车辆1的前方延伸一规定距离。该距离(纵向长度)l是根据本车辆1当前的车速计算出的。在本实施方式中,距离l是估计的以当前的车速(v)行驶规定的固定时间t(例如3秒)后的距离(l=v
×
t)。但是,距离l还可以是规定的固定距离(例如100m),也可以是车速(和加速度)的函数。此外,将栅格区域rw的宽度w设定为车行道5的宽度。
65.栅格区域rw由分别沿车行道5的延伸方向x和宽度方向(横向)y延伸的多条栅格线划分为很多矩形栅格区块。x方向和y方向的栅格线的交点为栅格点gn。将一个栅格在x方向上的长度和一个栅格在y方向上的长度分别设定为固定值。在本实施方式中,例如一个栅格在x方向上的长度为10m,一个栅格在y方向上的长度为0.875m。
66.需要说明的是,一个栅格的长度可以根据车速等设定为可变值。此外,在图3中,因为行车道5是直线区间,所以栅格区域rw和栅格区块被设定为矩形。当行车道包括曲线区间时,栅格区域和栅格区块可以设定为矩形,也可以不设定为矩形。
67.然后,第一路径计算部113在第二候选路径的计算中,根据外部信号,将栅格区域rw内的规定的栅格点gt设定为目标到达位置pe,并设定目标到达位置pe(gt)处的目标速度。外部信号例如是从安装在本车辆1上的导航系统(省略图示)发送来的前往目的地(驻车区等)的引导指示信号。
68.接着,第一路径计算部113执行用于设定路径的运算处理。在该运算处理中,第一路径计算部113首先执行计算多个第一候选路径r1m(m=1、2、3
……
)的候选路径计算处理。该处理与现有的采用状态栅格(state lattice)法计算候选路径相同。
69.下面,说明候选路径的计算概要。第一路径计算部113绘制从本车辆1当前的位置ps(起点)到栅格区域rw内的各栅格点gn(终点)的候选路径。第一路径计算部113还设定终点的速度信息。
70.起点和终点通过一个或多个栅格点gn相连结,或者不通过栅格点gn而相连结。第一路径计算部113针对各第一候选路径r1m利用路径曲线模式对栅格点之间进行拟合来计算位置信息,计算速度变化曲线,以便与速度变化模式相匹配。速度变化模式以急加速(例如0.3g)、缓加速(例如0.1g)、维持车速、缓减速(例如-0.1g)、急减速(例如-0.3g)的组合而生成,不是针对每个栅格设定速度变化模式,而是跨越该第一候选路径r1m的规定长度
(例如50m~100m)设定速度变化模式。
71.而且,第一路径计算部113针对各候选路径设定采样点sp,计算采样点sp处的速度信息。在图3中,仅示出很多候选路径中的三个第一候选路径r11、r12、r13。需要说明的是,在本实施方式中,各第一候选路径r1m是从起点到经过固定时间(例如3秒)后的到达位置的路径。
72.然后,第一路径计算部113计算已得到的第一候选路径r1m的路径代价。在各第一候选路径r1m的路径代价的计算中,第一路径计算部113例如能够针对各采样点sp,计算车辆1运动产生的惯性力fi、与障碍物(此处为其他车辆3)的碰撞概率pc以及乘员因该碰撞而承受的冲击力fc(或者是碰撞的反作用力),根据上述值计算作用于乘员的外力fc,将第一候选路径r1m上所有采样点sp处的外力fc(绝对值)的合计值作为第一候选路径r1m的路径代价(候选路径代价)epm计算出来。
73.并且,第一路径计算部113将所有第一候选路径r1m和第一候选路径r1m各自的路径代价信息一起输出给目标运动决定部130。
74.如上所述,第一路径即被设定好。
75.基本上与所述第一路径一样,将第二路径也计算出来。不过,第二路径是选择出的路径代价最小的路径,将该路径输出给目标运动决定部130。
76.此处,在本第一实施方式中,作为向目标运动决定部130输出的路径,有由第一运算部110计算出的第一路径和由第二运算部120计算出的第二路径,但目标运动决定部130基本采用第一路径。这是因为,利用深度学习和强化学习设定的第一路径是容易成为反映了驾驶员的想法的路径,即该路径不会让驾驶员产生在避开障碍物时过于谨慎等的拖沓感之故。
77.但是,利用深度学习对车外环境的认定还处于发展阶段。也就是说,利用深度学习构筑的环境模型针对与作为环境模型基础的信息相类似的范围能够计算出准确的信息,但当实际车外环境等与环境模型有较大的差异时,推测出的车外环境有时会与实际的车外环境相背离。
78.例如,在图4中,示出由第一安全区域设定部112设定的第一安全区域sa1和由第二安全区域设定部122设定的第二安全区域sa2。第一安全区域sa1是图4的阴影部分,第二安全区域sa2是从图4的阴影部分中除去虚线框内侧后剩下的部分(参照图5)。如图4所示,在第一安全区域sa1,其他车辆3的一部分也设在安全区域内。这可能会在利用深度学习进行的图像认定中无法准确推测其他车辆3的车宽的情况下等发生。
79.像这样,因为在利用深度学习进行的车外环境的认定中,有时会推测出与实际的车外环境相背离的车外环境,所以利用深度学习的功能在汽车功能安全标准(iso 26262)中提出的功能安全等级(asil)中相当于asil-b。因此,需要下功夫提高功能安全等级。
80.于是,在本实施方式中,当第一路径在第二安全区域sa2内时,主运算装置100的目标运动决定部130选择该第一路径作为汽车1(本车辆1)应行驶的路径,决定汽车1的目标运动,以便使该汽车1通过第一路径,而在第一路径脱离第二安全区域sa2时,目标运动决定部130则不选择该第一路径作为汽车1应行驶的路径。更具体而言,如果在计算第一路径之际得知被设定为候选路径的多个第一候选路径r1n(n=1、2、3
……
)全部脱离了第二安全区域sa2,目标运动决定部130则选择第二路径作为汽车1应行驶的路径。
81.例如,如图5所示,由第一路径计算部113设定第一候选路径r11、r12、r13。该三个路径即第一候选路径r11~r13中,路径r11、r12的一部分脱离了第二安全区域sa2,而路径r13通过第二安全区域sa2。此时,目标运动决定部130不选择脱离了第二安全区域sa2的路径r11、r12作为汽车1应行驶的路径,而选择路径r13作为汽车1应行驶的路径。
82.另一方面,如图6所示,假设由第一路径计算部113设定第一候选路径r14、r15、r16。在第一候选路径r14~r16这三者中,所有路径的一部分都脱离了第二安全区域sa2。此时,目标运动决定部130选择由第二运算部120计算出的多个第二候选路径中路径代价最小的第二候选路径r2作为汽车1应行驶的路径。
83.因为对象物认定部121根据现有技术中存在的规定的规则认定对象物,所以能够以良好的精度认定对象物的大小等。此外,因为第二安全区域设定部122根据将对象物周围几米的范围视为无法避开范围等的规定的规则来设定第二安全区域sa2,所以在要避开其他车辆3时,第二候选路径也能够保证与其他车辆3之间有足够的距离。也就是说,能够使第二运算部120的功能达到相当于asil-d的功能安全等级。因此,如果在计算第一候选路径之际得知被设定为候选路径的多个第一候选路径r1n全部脱离了第二安全区域sa2,目标运动决定部130则选择第二候选路径作为汽车1应行驶的路径,由此而能够使汽车1在安全性较高的路径上行驶。这样一来,能够提高具有利用深度学习的功能的主运算装置100的功能安全等级。
84.-2-2.安全路径的计算-此处,对安全路径的计算方法进行说明。如前所述,安全路径是由备用运算装置300计算出的。
85.因为安全路径基本上与所述第二路径一样地计算出来,所以此处以不同点为中心进行说明,有时会省略对相同的构成和动作做说明。
86.首先,在行车道5上设定包括栅格点gn(n=1、2
……
n)的栅格区域rw,执行计算多个候选路径的候选路径计算处理,能够采用与安全路径计算和第二路径计算相同的技术。
87.并且,安全路径计算部313从由第三安全区域设定部312确定下来的第三安全区域sa3内的候选路径中,计算出汽车1(本车辆1)应行驶的安全路径。
88.此处,如前所述,备用运算装置300设定汽车1能够安全停车的位置即安全停车位置tp,将通过第三安全区域sa3内并朝向安全停车位置tp行驶的行驶路径设定为安全路径rs(参照图5)。因此,原则上,安全路径rs是从通过第三安全区域sa3内并朝向安全停车位置tp行驶的候选路径中选择出的路径代价最小的路径,将该路径输出给目标运动决定部330。
89.需要说明的是,作为使用由备用运算装置300输出的安全路径rs的场景设想的是,主运算装置100发生故障等不良情况或驾驶员难以继续驾驶等发生了异常状况的情况。于是,备用运算装置300可以考虑着异常信息设定安全停车位置tp和/或安全路径rs。
90.例如,当检测到主运算装置100出现了故障且可能妨碍继续驾驶时,有时能够作出以下判断:最好充分降低速度,尽可能快地将车辆移动到能够停车的地方。此时,例如,如图5所示,只要备用运算装置300将最近且车辆能够安全停车的路肩8设定为安全停车位置tp,并将行驶到该路肩8的最短路线设定为安全路径rs即可。
91.当没有可供避开的路肩时,可以点亮警示灯,向周围发出异常状态警告后,再在同一车线内减速并停车。
92.此外,例如,在确认到车辆1无故障,但驾驶员因突发疾病而无法驾驶时,例如可以与导航系统或gps的测量结果等联动,将医院或最近的公共设施设定为安全停车位置tp,使车辆一边通过在各本车辆1的位置确定下来的第三安全区域sa3,一边自动行驶到设定好的安全停车位置tp。可以这样让安全路径计算部313一边考虑着本车辆1的异常状态和驾驶员状态一边设定安全路径rs。
93.-2-3.运算系统的处理工作-下面,参照图7~图9的流程图,说明运算系统sy在决定汽车1的驾驶路径时所做的处理工作。需要说明的是,假设汽车1的驾驶模式为辅助驾驶或自动驾驶。
94.如图7所示,辅助驾驶或自动驾驶的动作一开始,就在运算系统sy中并行执行由主运算装置100进行的处理(步骤s100)和由备用运算装置300进行的处理(步骤s200)。
95.(a)由主运算装置进行的处理此处,参照图8,对步骤s100中的由主运算装置100进行的处理进行说明。
96.首先,在步骤s101中,主运算装置100读取来自车外信息获取装置m1(各摄像头50、各雷达51以及各传感器52~56)的信息。
97.然后,主运算装置100(第一运算部110、第二运算部120)并行进行第一候选路径的计算和第二候选路径的计算。
98.在步骤s102中,第一运算部110利用深度学习推测车外环境。
99.在接下来的步骤s103中,第一运算部110设定第一安全区域sa1。
100.在接下来的步骤s104中,第一运算部110使用强化学习计算第一候选路径,并将第一候选路径输出给目标运动决定部130。
101.另一方面,在步骤s105中,第二运算部120根据规定的规则认定对象物。
102.在步骤s106中,第二运算部120设定第二安全区域sa2。
103.在步骤s107中,第二运算部120根据规定的规则计算第二候选路径,并将第二候选路径输出给目标运动决定部130。
104.在接下来的步骤s108中,在目标运动决定部130中,判断从第一运算部110接收到的第一候选路径是否在第二安全区域sa2内。当在该步骤s108中从第一运算部110接收到的第一候选路径中存在全部包含在第二安全区域sa2内的路径时(判断为是),流程进入步骤s109。另一方面,当在步骤s108中从第一运算部110接收到的第一候选路径全部为其路径内的至少一部分脱离了第二安全区域sa2时(判断为否),流程进入步骤s110。
105.在步骤s109中,目标运动决定部130选择第一候选路径作为汽车1应行驶的路径。另一方面,在步骤s110中,目标运动决定部130选择第二候选路径作为汽车1应行驶的路径。
106.在接下来的步骤s111中,目标运动决定部130计算出汽车1的基于步骤s109的选择结果的目标运动。
107.在接下来的步骤s112中,能量管理部140设定目标控制量,以便实现步骤s111中计算出的目标运动且使能量效率达到最大。具体而言,例如在输出由目标运动决定部130决定下来的所要求的驱动力时,能量管理部140计算变速器40的级数、进排气门(省略图示)的开关时刻、燃料喷射器(省略图示)的燃料喷射时刻等,以便使发动机10的燃料消耗量达到最少。此外,在输出目标制动力时,能量管理部140通过增大与发动机10相连的所述发电机的再生发电量和制冷用压缩机的驱动负荷生成所述制动力,以便使发动机制动力达到最小。
能量管理部140对车速和转角进行控制,以便使转弯时作用于汽车1的滚动阻力达到最小。具体而言,调节制动力的产生和转向时刻,以便使侧倾和汽车1的前部下沉的纵倾同步发生而产生斜前方侧倾(diagonal roll)姿势。通过产生斜前方侧倾姿势,作用于前侧的转弯外轮的载荷会增大。因此能够以较小的转角转弯,从而能够减小作用于汽车1的滚动阻力。
108.在接下来的步骤s113中,主运算装置100进行各执行装置类ac的运转控制,以便使对执行装置类ac的控制量达到在步骤s112中计算出的目标控制量。步骤s113结束后,流程进入图7的步骤s300。
109.(b)由备用运算装置进行的处理此处,参照图9,对在步骤s200中的由备用运算装置300进行的处理进行说明。
110.首先,在步骤s301中,备用运算装置300获取基于车外信息获取装置m1认定出的对象物的信息。例如,备用运算装置300获取由第二运算部120的对象物认定部121认定出的对象物的信息。需要说明的是,也可以是:备用运算装置300具有与第二运算部120的对象物认定部121相同的功能,在自装置内获取基于车外信息获取装置m1认定出的对象物的信息。
111.接着,在步骤s304中,备用运算部310搜索能够让车辆安全停车的自由空间,并将安全停车位置tp设定在该自由空间中。或者,后备运算部310与gps或汽车导航等协作,取得在驾驶员存在异常的情况下设定为安全停车位置tp的最近的设施信息。
112.在步骤s305中,备用运算部310设定第三安全区域sa3。
113.在接下来的步骤s308中,在目标运动设定部330,从由备用运算部310接收到的安全路径中选择存在于第三安全区域sa3内的路径,并将该已选择出的安全路径设定为汽车1应行驶的路径。
114.在接下来的步骤s311中,目标运动决定部330计算用于使汽车1在在步骤s308中选择出的路径上行驶的目标运动。
115.在接下来的步骤s312中,能量管理部340设定目标控制量,以便实现在步骤s311中计算出的目标运动且使能量效率达到最大,流程进入图7的步骤s300。
116.返回图7,在步骤s300中,在运算系统sy中,由异常检测部450判断是否已检测出驾驶员和/或本车辆1异常。
117.当在步骤s300中异常检测部450未检测到异常时(判断为否),流程进入步骤s400的“正常驾驶模式”。在步骤s400的“正常驾驶模式”下,选择装置500选择并输出用于实现从主运算装置输出的目标运动的控制信号。
118.另一方面,当在步骤s300中异常检测部450检测到异常时(判断为是),流程进入步骤s500的安全驾驶模式。在步骤s400的“正常”驾驶模式下,选择装置500选择并输出用于实现从主运算装置输出的目标运动的控制信号。
119.总而言之,安装在汽车1上的汽车用运算系统sy包括主运算装置100、备用运算装置300以及选择装置500。主运算装置100具有第一路径计算部113(相当于路径生成部),第一路径计算部113根据来自获取车外环境信息的车外信息获取装置m1的输出,利用深度学习推测车外环境,并根据推测出的车外环境生成第一路径,主运算装置100使用第一路径计算部113的输出决定目标运动,并输出用于实现该目标运动的控制信号。备用运算装置300具有安全路径计算部313(相当于安全路径生成部),安全路径计算部313根据来自车外信息获取装置m1的输出,生成车辆行驶到能够安全停车的安全停车位置tp停车的行驶路径即安
全路径,备用运算装置300决定用于使车辆在该安全路径上行驶的备用目标运动,并输出用于实现该备用目标运动的备用控制信号。选择装置500接收从主运算装置100输出的控制信号和从备用运算装置300输出的备用控制信号。正常驾驶时,选择装置500选择并输出从主运算装置100输出的控制信号,而当检测到主运算装置100的故障时,选择装置500则选择并输出从备用运算装置300输出的备用控制信号。
120.根据该构成方式,能够提高具有利用深度学习的功能的主运算装置100的功能安全等级。
121.(其他实施方式)上述实施方式仅为示例而已,不得对本公开的范围做限定性解释。本公开的范围由权利要求书的范围定义,属于权利要求书的等同范围的任何变形、变更都包括在本公开的范围内。也就是说,此处公开的技术并不限于上述实施方式,在不脱离权利要求书的主旨的范围内还会有各个替代技术方案。
122.例如,在上述第一、第二实施方式中,由目标运动决定部130决定出目标运动之后,由能量管理部140设定目标控制量,以便实现目标运动且使能量效率达到最大。并不限于此,也可以省去能量管理部140。也就是说,也可以由目标运动决定部130设定实现目标运动的目标控制量。
123.例如,在上述实施方式中,主运算装置100和备用运算装置300分别由不同芯片构成,但不限于此。例如,主运算装置和备用运算装置也可以采用物理上相分离的构成且收纳在同一壳体或封装体内。
124.此外,异常检测部450也可以构成为能够检测车外信息获取装置m1的输出本身、来自车内信息获取装置m2的输出本身是否存在异常。例如,可以构成为:当像摄像头50发生故障或来自摄像头50的信号输入中断时那样,发生了主运算装置100的路径生成受到不良影响那样的状态时,能够将该状态检测出来。并且,也可以构成为:当在异常检测部450检测到摄像头50等的车外信息获取装置m1的输出异常时,选择装置500选择并输出从备用运算装置300输出的备用控制信号。
125.此外,在上述实施方式中,设有选择装置500,但不限于此。例如,也可以将异常检测部450的检测结果提供给主运算装置100和备用运算装置300这二者。并且,正常驾驶时,停止备用运算装置300的输出,将主运算装置100的控制信号输出给执行装置类ac。另一方面,也可以构成为:当检测到主运算装置的故障时,停止主运算装置100的输出,将从备用运算装置300输出的备用控制信号输出给执行装置类ac。
126.此外,也可以将由第二运算部120的第二安全区域设定部122设定出的安全区域的信息提供给第一运算部110的路径生成部705。并且,也可以让第一运算部110的第一路径计算部113考虑着由第二安全区域设定部122设定的安全区域设定第一路径。
127.(已导入实际系统中的导入例)参照图10a和图10b,对导入实际系统中的导入例进行说明。需要说明的是,在下述说明中,将图10a和图10b统一简称为图10。
128.-1.概要-首先,本公开所涉及的汽车用运算系统sy(以下简称为运算系统sy)在功能上分为:(1)用于认知车外环境、车内环境(包括驾驶员状态)的构成(以下也称为认知系统块
b1);(2)用于根据认知系统块b1的认知结果对各种状态和状况等作出判断,决定汽车1的动作的构成(以下也称为判断系统块b2);(3)用于根据判断系统块b2的决定,具体生成传递给执行装置类的信号和数据等的构成(以下也称为操作系统块b3)。本公开的技术具有以下特征:制成一个单元来实现认知系统块b1、判断系统块b2以及操作系统块b3。
129.此外,本运算系统sy包括:(1)主运算部700,由用于实现正常驾驶时的自动驾驶的认知系统块b1、判断系统块b2以及操作系统块b3构成;(2)安全功能部800,具有主要对主运算部700的认知系统块b1和判断系统块b2进行弥补的功能;(3)备用安全功能部900,当发生主运算部700和安全功能部800的功能失效等异常状况时,使汽车1移动到安全的位置。
130.在本运算系统sy中,主运算部700的认知系统块b1和判断系统块b2利用各种模型执行处理,该各种模型是通过利用神经网络的深度学习构筑起来的。通过使用上述模型进行处理,能够进行基于对车辆状态、车外环境、驾驶员状态等的综合判断的驾驶控制。也就是说,能够实时地对大量输入信息进行协调并加以控制。另一方面,如前所述,利用深度学习的车外环境的认定和路径的计算还处于发展阶段,大致停留在asil-b这一等级上。需要说明的是,在图10中,作为参考信息记载了各块的asil信息,但参考信息并不限于该记载,各块也可以具有与图10不同的功能安全等级。
131.于是,在本运算系统sy中,假定可能通过由主运算部700执行的深度学习推导出脱离某特定的容许范围的判断和处理(以下简称为脱离处理),监测上述脱离处理。如果检测出脱离处理,就将上述判断和处理置换为由具有相当于asil-d的功能安全等级的安全功能部800进行的判断和处理,或者用具有相当于asil-d的功能安全等级的安全功能部800进行的判断和处理对上述判断和处理进行弥补。
132.具体而言,例如,安全功能部800构成为:(1)根据现有技术在汽车等中所采用的人与物等的认定方法,识别车外的物体(本公开中称为对象物);(2)根据现有技术在汽车等中所采用的方法,设定车辆能够安全通过的安全区域,将通过该安全区域的路径设定为汽车应通过的行驶路径。通过进行这样的、所谓的基于规则的判断和处理,能够实现相当于asil-d的功能安全等级。
133.本运算系统sy的另一个特征在于:主运算部700和安全功能部800根据同一输入信息(包括由车外信息获取装置m1和车内信息获取装置m2获取的信息),并列进行同一目的的处理(例如路径生成)。这样一来,能够监测由主运算部700推导出脱离处理的情况,并能够根据需要采用由安全功能部800进行的判断和处理,或者让主运算部700进行再运算。
134.主运算部700和安全功能部800既可以由一个或多个芯片构成,将它们的两个功能结合起来(以下也将两个功能合起来称为车辆控制功能),主运算部700和安全功能部800也可以分别由独立的芯片构成。
135.在上述实施方式中示出了由主运算部700进行的脱离处理的对应例。该对应例的具体内容为:在由主运算部700设定出路径且该路径脱离安全功能部800所设定的安全区域的情况下,将该路径置换为由安全功能部800生成的基于规则的路径。
136.而且,在本运算系统sy中设有备用安全功能部900(相当于备用运算装置300),以便也能够应对主运算部700和安全功能部800这二者都发生故障的状况。备用安全功能部900以与主运算部700和安全功能部800不同的构成具备了以下功能:根据车外信息基于规
则生成路径,执行使车辆行驶到安全的位置停车的车辆控制。因此,优选备用安全功能部900以与主运算部700和安全功能部800都不同的装置(芯片)构成。
137.这样一来,例如,在主运算部700和安全功能部800由共用芯片构成的情况下,即使该芯片本身发生了故障,也能够让车辆停在安全的地方。换言之,通过设置上述备用安全功能部900,能够通过利用另一功能对车辆控制功能或备用功能的故障进行弥补,确保发生故障时能够安全工作。
138.-2.构成-下面,参照图10,结合与实施方式的对比对本运算系统sy的具体构成进行说明。需要说明的是,有时使用同一符号对与实施方式相同的构成进行说明。此外,有时对相同的构成省略详细说明。
139.将获取汽车的车外环境信息的车外信息获取装置m1和获取车内环境信息的车内信息获取装置m2各自获取到的数据作为输入信号提供给运算系统sy。此外,也可以像云计算那样,输入来自连接在车外网络(例如互联网等)上的系统或服务的信息作为向运算系统sy输入的输入信号(图10中记为“外部输入”)。
140.车外信息获取装置m1例如有:(1)多个摄像头50;(2)多个雷达51;(3)车速传感器52等机械传感器520;(4)油门开度传感器53、方向盘转角传感器54、制动传感器55等驾驶员输入部530;(5)包括gps等定位系统的位置传感器56等。
141.车内信息获取装置m2例如有车内摄像头58、车内传感器59等。车内传感器59例如包括油门踏板、制动踏板、转向器、各种开关等检测驾驶员对各种操作对象物的操作的传感器。需要说明的是,在图10中,省略车内信息获取装置m2的图示。
142.-2-1.主运算部-此处,对主运算部700的构成例和由主运算部700使用深度学习进行的路径生成进行说明。
143.如图10所示,主运算部700具有物体识别部701,物体识别部701根据摄像头50和/或雷达51的输入识别车外的物体(对象物)。物体识别部701具有下述功能:根据摄像头50拍摄到的车外的图像(包括视频)、由雷达51得到的反射波的峰值一览表(peak list)识别车外的物体。此外,如实施方式所示,主运算部700具有下述功能:利用深度学习判别识别出的物体是什么。能够将迄今已知的基于图像和电波的物体识别技术应用于物体识别部701。
144.由物体识别部701识别出的结果发送到地图生成部702。在地图生成部702,将本车辆周围分为多个区域(例如,前方、左右方向、后方),针对各区域进行地图绘制处理。在地图绘制处理中,针对各区域对由摄像头50识别出的物体信息和由雷达51识别出的物体信息进行整合并反映到地图上。
145.由地图生成部702生成的地图,在车外环境推测部703(相当于车外环境推测部111)中通过使用深度学习进行的图像识别处理进行车外环境的推测时使用。具体而言,在车外环境推测部703,通过基于利用深度学习构筑的环境模型704的图像识别处理绘制表示车外环境的3d地图。在深度学习中,使用多层神经网络(dnn:deep neural network,深度神经网络)。多层神经网络例如有cnn(convolutional neural network:卷积神经网络)。更具体而言,在车外环境推测部703,(1)将各区域的地图结合起来,生成表示本车辆1周围情况的整合地图,(2)针对该整合地图内的运动物体,预测该运动物体与本车辆1之间的距离、方
向、相对速度的位移,(3)将上述结果纳入车外环境模型704中。而且,在车外环境推测部703,(4)根据从车内或车外得到的高精度地图信息、通过gps等获取的位置信息、车速信息以及六轴信息的组合,推测本车辆1在整合地图上的位置,(5)并进行所述路径代价的计算,(6)将上述结果与通过各种传感器获取的本车辆1的运动信息一起纳入车外环境模型704。通过上述处理,车外环境推测部703会随时更新车外环境模型704,将车外环境模型704用于由路径生成部705进行的路径生成上。
146.gps等定位系统的信号、从车外网络发送来的例如用于汽车导航的数据发送到路径搜索部706。路径搜索部706使用gps等定位系统的信号、从车外网络发送来的例如用于导航的数据搜索车辆的广域路径。
147.在路径生成部705,根据车外环境模型704和路径搜索部706的输出生成车辆的行驶路径。主运算部700的具体路径搜索方法例如有实施方式的“2-1.第一路径、第二路径的计算”中第一路径的计算方法。至此为止的功能是利用深度学习进行的路径生成之一例,是实现相当于asil-b的功能安全等级的路径生成。
148.-2-2.安全功能部-此处,对安全功能部800的构成和由安全功能部800进行的基于规则的路径生成进行说明。
149.如图10所示,与主运算部700相同,安全功能部800具有物体识别部801,物体识别部801根据摄像头50和/或雷达51的输入识别车外的物体(对象物)。在安全功能部800,利用与主运算部700相同的方法识别出车外的物体后,不利用深度学习而利用迄今已知的基于规则的方法识别出物体,判别该物体是什么。例如,正如迄今已知的那样,利用已实现相当于asil-d的功能安全等级的识别机判别识别出物体是什么。
150.物体识别部801的识别结果是物体被分类运动物体和静止物体。在图10中,由标注了符号802且记载为“运动物体和静止物体分类”的电路块执行该分类。具体而言,此处,(1)将本车辆周围分为多个区域(例如,前方、左右方向、后方),(2)在各区域,整合由摄像头50识别出的物体信息和由雷达51识别出的物体信息,(3)生成针对各区域的运动物体和静止物体的分类信息。并且,(4)整合各区域的分类结果,(5)将上述结果作为本车辆周边的运动物体和静止物体的分类信息,例如在图3所示的栅格地图上进行管理。此外,针对运动物体,(6)预测该运动物体与车辆之间的距离、方向、相对速度,将预测结果作为运动物体的附属信息纳入,(7)并根据从车内或车外得到的高精度地图信息、通过gps等获取的位置信息、车速信息以及六轴信息的组合,推测本车辆相对于运动物体和静止物体的位置。此外,在安全功能部800,检测出基于车速信息和六轴信息的车辆状态,将该车辆状态作为本车辆1的附属信息用于路径生成。在安全功能部800,根据此处推测出的本车辆相对于运动物体和静止物体的位置、安全区域的搜索结果生成路径。需要说明的是,此处的安全区域相当于实施方式中的第二安全区域sa2。安全区域的设定与在上述实施方式中由安全区域设定部122进行的第二安全区域sa2的设定相同。此外,路径生成也与由第二路径计算部123进行的路径生成相同,此处省略其详细说明。至此为止的功能是基于规则进行的路径生成之一例,实现相当于asil-d的功能安全等级的路径生成。
151.由主运算部700和安全功能部800生成的路径发送给目标运动决定部710,根据两个路径的比较结果等决定最佳目标运动。例如,像上述实施方式中记载的那样,当由主运算
部700生成的路径脱离由安全功能部800搜索得到的安全区域时,采用由安全功能部800生成的路径。目标运动决定部730、车辆动能操作部740、能量管理部750相当于上述实施方式的目标运动决定部130、能量管理部140,此处省略其详细说明。
152.-2-3.备用安全功能部-此处,对备用安全功能部900的构成和由备用安全功能部900进行的基于规则的路径生成进行说明。备用安全功能部900包括为了能够基于规则执行最低限度的向安全停车位置移动的移动动作、停车动作所需要的构成。大概的构成能够通过与安全功能部800相同的功能实现。
153.如图10所示,在备用安全功能部900,根据由物体识别部801识别出的结果分类为运动物体和静止物体。在图10中,由标注了符号903且记载为“运动物体和静止物体分类”的电路块执行该分类。备用安全功能部900可以与安全功能部800共用物体识别部801,如图10所示。还可以对备用安全功能部900另外单独设置物体识别部。而且,备用安全功能部900包括测量车辆状态的车辆状态测量部901和掌握驾驶员的操作状态的驾驶员操作认知部902。车辆状态测量部901获取基于车速信息和六轴信息的车辆状态,将该车辆状态作为本车辆1的附属信息用于路径生成。驾驶员操作认知部902具有相当于监测部400的功能。除此以外的功能,虽然主运算部700和安全功能部800是独立设置的,但实质上与到此为止说明的构成的功能相同,此处省略其详细说明。-产业实用性-
154.此处公开的技术作为安装在汽车上的车辆用运算系统很有用。-符号说明-
155.sy运算系统100主运算装置110第一运算部(第一路径生成部)120第二运算部(第二路径生成部)300备用运算装置m1车外信息获取装置(信息获取装置)ac执行装置类
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

