1.本实用新型涉及机器人技术领域,尤其是指一种双向潜伏牵引移动机器人。
背景技术:
2.随着制造业的不断发展,自动化搬运输送设备将得到大量使用并逐步朝着智能化和信息化方向迈进。目前使用的搬运装置多数采用传统的轮式底盘结构结合机身安装的执行装置实现搬运功能。
技术实现要素:
3.本实用新型针对现有技术的问题提供一种结构简单、设计合理的潜伏牵引双向移动机器人。
4.为了解决上述技术问题,本实用新型采用如下技术方案:
5.一种双向潜伏牵引移动机器人,包括:
6.机器人本体、驱动装置、驱动轮、车架、万向轮和避障装置、控制系统、操作面板、升降牵引装置和供电系统;
7.所述驱动装置安装于所述机器人本体底部,所述控制系统用于控制机器人移动平台,所述操作面板安装于所述机器人本体上,所述供电系统用于给所述控制系统、所述操作面板和所述驱动装置提供电源,所述驱动装置包括驱动电机、驱动轮及减震系统,所述升降牵引装置安装于所述机器人本体上部。
8.在其中一个实施例中,所述升降牵引装置设置有两个,分布安装于所述机器人本体上部的两端。
9.在其中一个实施例中,所述升降牵引装置采用电缸驱动,所述升降牵引装置上部设置有用于连接搬运物搬运物的连接杆。
10.在其中一个实施例中,所述控制系统还包括一个运行控制器和两个电机控制主板,所述控制主板与所述电机控制主板通过can总线进行连接,所述运行控制器用于控制多个电机主板,每个电机控制主板控制一个控制驱动轮。
11.在其中一个实施例中,所述控制系统包括数据采集系统、数据分析系统和运行控制器,所述数据采集系统包括多个传感器,所述数据分析系统包括 pid调节器,所述控制系统用于将数据采集模块的信号进行模糊化处理输出为模糊量,pid调节器将模糊量进行反模糊化输送至运行控制器,运行控制器控制驱动装置的驱动电机进行运动。
12.在其中一个实施例中,所述控制系统采用可编程式的控制器。
13.有益效果:
14.本实用新型的一种双向潜伏牵引移动机器人,包括:机器人本体、驱动装置、驱动轮、车架、万向轮和避障装置、控制系统、操作面板、升降牵引装置和供电系统;所述驱动装置安装于所述机器人本体底部,所述控制系统用于控制机器人移动平台,所述操作面板安装于所述机器人本体上,所述供电系统用于给所述控制系统、所述操作面板和所述驱动装
置提供电源,所述驱动装置包括驱动电机、驱动轮及减震系统,所述升降牵引装置安装于所述机器人本体上部。本实用新型的双向潜伏牵引移动机器人采用模糊pid控制技术,可精准的控制移动机器人的轨迹。
附图说明
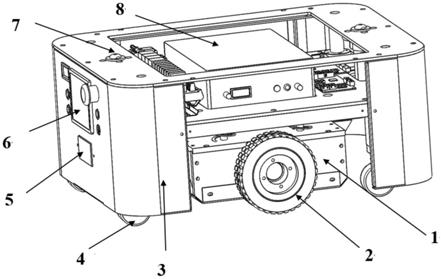
15.图1为本实用新型的一种双向潜伏牵引移动机器人的机械结构图。
16.附图标记分别为:
17.驱动装置
‑‑
1,驱动轮
‑‑
2,车架
‑‑
3,万向轮
‑‑
4,避障装置
‑‑
5,操作面板
‑‑
6,升降装置
‑‑
7,供电系统
‑‑
8。
具体实施方式:
18.为了便于本领域技术人员的理解,下面结合实施个例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。以下结合附图对本发明进行详细描述。
19.请参照图1,一种双向潜伏牵引移动机器人,包括:机器人本体、驱动装置1、驱动轮2、车架3、万向轮4和避障装置5、控制系统、操作面板6、升降牵引装置7和供电系统8;
20.所述驱动装置1安装于所述机器人本体底部,所述控制系统用于控制机器人移动平台,所述操作面板6安装于所述机器人本体上,所述供电系统8 用于给所述控制系统、所述操作面板6和所述驱动装置1提供电源,所述驱动装置包括驱动电机、驱动轮及减震系统,所述升降牵引装置7安装于所述机器人本体上部。
21.在其中一个是实施例中,所述升降牵引装置7设置有两个,分布安装于所述机器人本体上部的两端。
22.在其中一个实施例中,所述升降牵引装置7采用电缸驱动,所述升降牵引装置7上部设置有用于连接搬运物搬运物的连接杆。
23.在其中一个实施例中,所述控制系统还包括一个运行控制器和两个电机控制主板,所述控制主板与所述电机控制主板通过can总线进行连接,所述运行控制器用于控制多个电机主板,每个电机控制主板控制一个控制驱动轮。
24.在其中一个实施例中,所述控制系统包括数据采集系统、数据分析系统和运行控制器,所述数据采集系统包括多个传感器,所述数据分析系统包括 pid调节器,所述控制系统用于将数据采集模块的信号进行模糊化处理输出为模糊量,pid调节器将模糊量进行反模糊化输送至运行控制器,运行控制器控制驱动装置的驱动电机进行运动。
25.在其中一个实施例中,所述控制系统采用可编程式的控制器。
26.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应在本实用新型的保护范围内。
技术特征:
1.一种双向潜伏牵引移动机器人,其特征在于:包括:机器人本体、驱动装置(1)、驱动轮(2)、车架(3)、万向轮(4)和避障装置(5)、控制系统、操作面板(6)、升降牵引装置(7)和供电系统(8);所述驱动装置(1)安装于所述机器人本体底部,所述控制系统用于控制机器人移动平台,所述操作面板(6)安装于所述机器人本体上,所述供电系统(8)用于给所述控制系统、所述操作面板(6)和所述驱动装置(1)提供电源,所述驱动装置包括驱动电机、驱动轮及减震系统,所述升降牵引装置(7)安装于所述机器人本体上部。2.根据权利要求1所述的一种双向潜伏牵引移动机器人,其特征在于:所述升降牵引装置(7)设置有两个,分布安装于所述机器人本体上部的两端。3.根据权利要求1所述的一种双向潜伏牵引移动机器人,其特征在于:所述升降牵引装置(7)采用电缸驱动,所述升降牵引装置(7)上部设置有用于连接搬运物搬运物的连接杆。4.根据权利要求1所述的一种双向潜伏牵引移动机器人,其特征在于:所述控制系统还包括一个运行控制器和两个电机控制主板,所述控制主板与所述电机控制主板通过can总线进行连接,所述运行控制器用于控制多个电机主板,每个电机控制主板控制一个控制驱动轮。5.根据权利要求1所述的一种双向潜伏牵引移动机器人,其特征在于,所述控制系统采用可编程式的控制器。
技术总结
本实用新型涉及机器人技术领域,尤其是指一种双向潜伏牵引移动机器人,包括驱动装置、机器人本体、控制系统、操作面板、升降牵引装置和供电系统,所述驱动装置包括两套驱动电机、两个驱动轮及避震装置,驱动装置安装于所述车架底部,升降牵引装置安装于所述机器人本体上部,本实用新型采用单驱动双向行驶的设计,双轮差速实现前进后退及原地旋转,控制系统采用可编程式的控制器,简易操作的人机界面,可对移动机器人进行编程,以控制移动机器人的运动,与传统的磁力线控制机器人运动方式对比,本实用新型可有效的降低成本,并且本实用新型采用模糊PID控制技术,可精准的控制移动机器人的轨迹。人的轨迹。人的轨迹。
技术研发人员:胡建军 杨文亮
受保护的技术使用者:东莞市松迪智能机器人科技有限公司
技术研发日:2020.11.02
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

