1.本实用新型涉及电动汽车控制的技术领域,尤其涉及一种电动循环球转向器助力三模式系统。
背景技术:
2.随着电动汽车技术的发展,市场上不同的消费者根据不同路况情况下对转向力需求不同,城市低速路况下驾驶员需求较轻的转向力来缓解疲劳感,城郊高速路况下驾驶员需求稳重保持操纵感,而现有的助力系统对转向助力的模式切换不够完善。因此,需要开发出可切换转向助力模式的电子助力系统。
技术实现要素:
3.针对现有的电子助力系统存在的上述问题,现旨在提供一种电动循环球转向器助力三模式系统,为驾驶员提供多种助力手感,予以适应不同的路况,从而起到助力和操控整车转向的功能。
4.具体技术方案如下:
5.一种电动循环球转向器助力三模式系统,包括:
6.四轮速传感器,四所述轮速传感器分别设于所述车辆的轮胎处,每一所述轮速传感器用于检测每一所述车辆的轮胎的轮速信号;
7.若干路面识别装置,若干所述路面识别装置分别设于所述车辆的底部的周侧,若干所述路面识别装置分别用于识别路面的状态;
8.助力程序单元,所述助力程序单元设于所述车辆内,所述助力程序单元具有至少两种助力模式;
9.控制模块ecu,所述控制模块ecu设于所述车辆内,所述控制模块ecu分别与四所述轮速传感器、若干所述路面识别装置、所述助力程序单元信号连接。
10.上述的电动循环球转向器助力三模式系统,其中,还包括:电动机和执行机构,所述电动机与所述控制模块ecu信号连接,所述电动机与所述执行机构传动连接,所述执行机构与所述车辆的轮胎传动连接。
11.上述的电动循环球转向器助力三模式系统,其中,每一所述路面识别装置均包括:摄像头,所述摄像头与所述控制模块ecu信号连接。
12.上述的电动循环球转向器助力三模式系统,其中,所述助力模式包括:轻便模式、正常模式和运动模式。
13.上述的电动循环球转向器助力三模式系统,其中,所述路面的状态包括:高附路面、中附路面和低附路面;
14.所述路面为所述高附路面的状态下,与所述助力模式中的所述轻便模式相适配;
15.所述路面为所述中附路面的状态下,与所述助力模式中的所述正常模式相适配;
16.所述路面为所述低附路面的状态下,与所述助力模式中的所述运动模式相适配。
17.上述的电动循环球转向器助力三模式系统,其中,所述控制模块ecu通过can总线与车载电脑通讯连接。
18.上述的电动循环球转向器助力三模式系统,其中,每一所述路面识别装置还包括:距离传感器,所述距离传感器与所述控制模块ecu信号连接。
19.上述的电动循环球转向器助力三模式系统,其中,所述距离传感器为毫米波雷达。
20.上述的电动循环球转向器助力三模式系统,其中,所述控制模块ecu用于通过识别所述路面的状态实时切换成相应的所述助力模式。
21.上述技术方案与现有技术相比具有的积极效果是:
22.本实用新型为驾驶员提供三种助力手感,予以适应不同的路况,从而起到助力和操控整车转向的功能;识别到路面为高附路面的状态下选择轻便模式,识别到路面为中附路面的状态下选择正常模式,识别到路面为低附路面的状态下选择运动模式。本实用新型随着整车助力档位的改变,控制模块ecu可以迅速切换助力手感,不同模式下的控制模块ecu,对于相应的路况起到很好的舒适作用。
附图说明
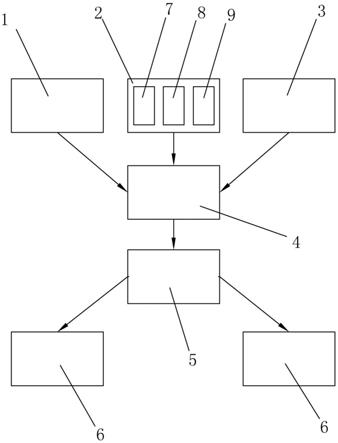
23.图1为本实用新型一种电动循环球转向器助力三模式系统的示意图;
24.附图中:1、轮速传感器;2、路面识别装置;3、助力程序单元;4、控制模块ecu;5、电动机;6、执行机构;7、摄像头;8、距离传感器;9、湿度传感器。
具体实施方式
25.下面结合附图和具体实施例对本实用新型作进一步说明,但不作为本实用新型的限定。
26.图1为本实用新型一种电动循环球转向器助力三模式系统的示意图,如图1所示,示出了一种较佳实施例的电动循环球转向器助力三模式系统,包括:四轮速传感器1、若干路面识别装置2、助力程序单元3和控制模块ecu4,四轮速传感器1分别设于车辆的轮胎处,每一轮速传感器1用于检测每一车辆的轮胎的轮速信号,若干路面识别装置2分别设于车辆的底部的周侧,若干路面识别装置2分别用于识别路面的状态,助力程序单元3设于车辆内,助力程序单元3具有至少两种助力模式,控制模块ecu4设于车辆内,控制模块ecu4分别与四轮速传感器1、若干路面识别装置2、助力程序单元3信号连接。
27.进一步,作为一种较佳的实施例,电动循环球转向器助力三模式系统还包括:电动机5和执行机构6,电动机5与控制模块ecu4信号连接,电动机5与执行机构6传动连接,执行机构6与车辆的轮胎传动连接。
28.进一步,作为一种较佳的实施例,每一路面识别装置均包括:摄像头7,摄像头7与控制模块ecu4信号连接。
29.进一步,作为一种较佳的实施例,助力模式包括:轻便模式、正常模式和运动模式。
30.进一步,作为一种较佳的实施例,路面的状态包括:高附路面、中附路面和低附路面。
31.进一步,作为一种较佳的实施例,路面为高附路面的状态下,与助力模式中的轻便模式相适配;
32.路面为中附路面的状态下,与助力模式中的正常模式相适配;
33.路面为低附路面的状态下,与助力模式中的运动模式相适配。
34.以上仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围。
35.本实用新型在上述基础上还具有如下实施方式:
36.本实用新型的进一步实施例中,请继续参见图1所示,控制模块ecu4通过can总线与车载电脑通讯连接。
37.本实用新型的进一步实施例中,每一路面识别装置还包括:距离传感器8,距离传感器8与控制模块ecu4信号连接。
38.本实用新型的进一步实施例中,距离传感器8为毫米波雷达。优选的,距离传感器8采用波长短、频带宽、穿透能力强的毫米波雷达。
39.本实用新型的进一步实施例中,控制模块ecu4用于通过识别路面的状态实时切换成相应的助力模式。
40.本实用新型为驾驶员提供三种助力手感,予以适应不同的路况,从而起到助力和操控整车转向的功能;识别到路面为高附路面的状态下选择轻便模式,识别到路面为中附路面的状态下选择正常模式,识别到路面为低附路面的状态下选择运动模式。
41.优选的,路面识别装置2获得行驶路面状况及路面湿度等信息。
42.优选的,路面识别装置2还包括:湿度传感器9,湿度传感器9用于检测路面的状况。
43.本实用新型的控制模块ecu4通过can网络获得abs\ebs外发的车辆的四个轮胎的轮速信号,根据整车轮速信号来计算转向轮的滑移率,再根据计算所得的滑移率来进行路面识别,根据自主识别的结果来分辨当前路面为高附路面,还是低附路面,还是中附路面,根据三种不同的路面智能选择不同的助力模式,高附路面选择轻便模式,低附路面选择运动模式,中附路面选择正常模式。
44.优选的,控制模块ecu4接收不同的报文,切换助力模式的程序。
45.本实用新型随着整车助力档位的改变,控制模块ecu4可以迅速切换助力手感,不同模式下的控制模块ecu4,对于相应的路况起到很好的舒适作用。
46.以上所述仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

