1.本发明涉及车辆底盘悬架技术领域,具体涉及一种车辆底盘悬架调高的分步协同控制策略和系统。
背景技术:
2.现有技术中,在车辆底盘控制领域,利用底盘悬架调高控制功能可以升降底盘的高度,从而增强车辆的通过性,方便货物的装卸,具有很高的实用价值,通常选用油气弹簧形成悬架结构。由于底盘悬架调高涉及车辆的安全性,为防止在底盘调高过程中发生倾覆危险,要求可靠合理的控制策略。
技术实现要素:
3.鉴于上述问题,本发明实施例提供一种车辆底盘悬架调高的分步协同控制策略和系统,解决现有底盘悬架调高控制可靠性、安全性较差的技术问题。
4.本发明实施例的车辆底盘悬架调高的分步协同控制策略,包括:
5.根据升降指令建立车辆底盘悬架调高迭代过程;
6.当在调高迭代过程中达到预期高度时,维持车辆底盘悬架高度。
7.本发明一实施例中,所述根据升降指令建立车辆底盘悬架调高迭代过程包括升高迭代过程:
8.根据升降指令确定升高的高度目标值;
9.通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
10.根据弹性支撑点的当前高度形成各弹性支撑点升序调整顺序;
11.在升序调整顺序中控制最低弹性支撑点升高一个基本步长;
12.当所有弹性支撑点未达到高度目标值时,进行升高迭代。
13.本发明一实施例中,所述根据升降指令建立车辆底盘悬架调高迭代过程包括降低迭代过程:
14.根据升降指令确定降低的高度目标值;
15.通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
16.根据弹性支撑点的当前高度形成各弹性支撑点降序调整顺序;
17.在降序调整顺序中控制最高弹性支撑点降低一个基本步长;
18.当所有支撑点未达到高度目标值时,进行降低迭代。
19.本发明一实施例中,所述根据升降指令建立车辆底盘悬架调高迭代过程包括:
20.根据迭代次数,一个基本步长高度变化的调整时长按预置等差比例降低。
21.本发明实施例的车辆底盘悬架调高的分步协同控制系统,包括:
22.存储器,用于存储上述的车辆底盘悬架调高的分步协同控制策略中处理过程对应的程序代码;
23.悬架控制器,用于执行所述程序代码。
24.本发明实施例的车辆底盘悬架调高的分步协同控制系统,包括:
25.控制建立装置,用于根据升降指令建立车辆底盘悬架调高迭代过程;
26.状态保持装置,用于当在调高迭代过程中达到预期高度时,维持车辆底盘悬架高度。
27.本发明一实施例中,所述控制建立装置包括:
28.升高指令识别模块,用于根据升降指令确定升高的高度目标值;
29.第一信号采集模块,用于通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
30.升序建立模块,用于根据弹性支撑点的当前高度形成各弹性支撑点升序调整顺序;
31.升高调整模块,用于在升序调整顺序中控制最低弹性支撑点升高一个基本步长;
32.第一迭代控制模块,用于当所有弹性支撑点未达到高度目标值时,进行升高迭代。
33.本发明一实施例中,控制建立装置包括:
34.降低指令识别模块,用于根据升降指令确定降低的高度目标值;
35.第二信号采集模块,用于通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
36.降序建立模块,用于根据弹性支撑点的当前高度形成各弹性支撑点降序调整顺序;
37.降低调整模块,用于在降序调整顺序中控制最高弹性支撑点降低一个基本步长;
38.第二迭代控制模块,用于当所有支撑点未达到高度目标值时,进行降低迭代。
39.本发明一实施例中,所述控制建立装置包括:
40.调整时长优化装置,用于根据迭代次数,一个基本步长高度变化的调整时长按预置等差比例降低。
41.本发明实施例的车辆底盘悬架调高的分步协同控制系统,包括:
42.悬架控制器,用于接受升降指令形成液态工作介质通路中换向电磁阀的通断换向控制信号序列,通断换向控制信号序列形成调高迭代过程。
43.可调支撑单元,用于形成车辆底盘的悬架支撑结构,根据所述通断换向控制信号序列受控调整支撑高度。
44.本发明实施例的车辆底盘悬架调高的分步协同控制策略和系统根据底盘高度调节过程中的支撑点高度差形成控制优先级和自动反馈控制过程,能够保障调高过程中车架受力均匀,防止底盘侧倾,保障调高安全。进一步形成各支撑点位置的分布协同调节,保障了调高过程舒适性。在驾驶员操作底盘调高时,用于安全可靠的控制底盘升降,并提高车辆的舒适性,该方法具备通用性。
附图说明
45.图1所示为本发明一实施例车辆底盘悬架调高的分步协同控制系统的组成示意图。
46.图2所示为本发明一实施例车辆底盘悬架调高的分步协同控制策略的流程示意图。
47.图3所示为本发明一实施例车辆底盘悬架调高的分步协同控制系统的架构示意图。
具体实施方式
48.为使本发明的目的、技术方案及优点更加清楚、明白,以下结合附图及具体实施方式对本发明作进一步说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
49.本发明一实施例车辆底盘悬架调高的分步协同控制系统包括:
50.悬架控制器,用于接受升降指令形成液态工作介质通路中换向电磁阀的通断换向控制信号序列。
51.可调支撑单元,用于形成车辆底盘的悬架支撑结构,根据通断换向控制信号序列受控调整支撑高度。
52.本发明一实施例车辆底盘悬架调高的分步协同控制系统如图1所示。在图1中,本实施例的可调支撑单元包括:
53.油气弹簧,用于形成车辆底盘悬架的一个弹性支撑点。
54.换向电磁阀,用于布设在油气弹簧的工作腔供油油路中受控形成液态工作介质正反进出通路。在本发明一实施例中,可以采用3位2通电磁阀形成液态工作介质正、反、锁闭三种流动工作状态,保证油气弹簧的支撑状态的可控稳定性。
55.高度传感器,用于设置在车辆底盘与弹性支撑支点连接位置,获取连接位置的相对高度。
56.如图1所示,在本发明一实施例中,包括四个可调支撑单元,分别形成对底盘的右前、左前、右后和左后弹性支撑点。每个可调支撑单元中的油气弹簧的工作腔连通液态工作介质油路,液态工作介质油路上的换向电磁阀的通道分别连接进液干路和回液干路,在进液干路上串联过滤器。
57.本发明实施例的车辆底盘悬架调高的分步协同控制系统提供了一种对车辆底盘悬架有效控制的支撑结构,利用油气弹簧形成支撑高度的平缓调节基础,提供改变液态工作介质流量的信号控制机制以实现悬架调高过程的高度可靠性、安全性。
58.本发明一实施例车辆底盘悬架调高的分步协同控制策略包括:
59.根据升降指令建立车辆底盘悬架调高迭代过程;
60.当在调高迭代过程中达到预期高度时,维持车辆底盘悬架高度。
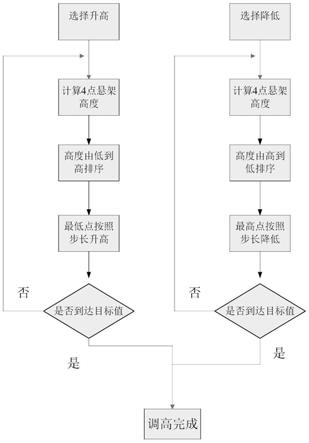
61.本发明一实施例车辆底盘悬架调高的分步协同控制策略如图2所示。在图2中,
62.升高迭代过程包括:
63.根据升降指令确定升高的高度目标值;
64.通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
65.根据弹性支撑点的当前高度形成各弹性支撑点升序调整顺序;
66.在升序调整顺序中控制最低弹性支撑点升高一个基本步长;
67.当所有弹性支撑点未达到高度目标值时,进行升高迭代。
68.降低迭代过程包括:
69.根据升降指令确定降低的高度目标值;
70.通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
71.根据弹性支撑点的当前高度形成各弹性支撑点降序调整顺序;
72.在降序调整顺序中控制最高弹性支撑点降低一个基本步长;
73.当所有支撑点未达到高度目标值时,进行降低迭代。
74.本发明实施例的车辆底盘悬架调高的分步协同控制策略根据底盘高度调节过程中的支撑点高度差形成控制优先级和自动反馈控制过程,能够保障调高过程中车架受力均匀,防止底盘侧倾,保障调高安全。进一步形成各支撑点位置的分布协同调节,保障了调高过程舒适性。
75.在本发明一实施例中,调高迭代过程中还包括:
76.根据迭代次数,一个基本步长的调整时长按预置等差比例降低。
77.本发明实施例的车辆底盘悬架调高的分步协同控制策略在保证调高过程舒适性的同时提高调高速率。
78.本发明一实施例车辆底盘悬架调高的分步协同控制系统,包括:
79.存储器,用于存储上述实施例的车辆底盘悬架调高的分步协同控制策略中处理过程对应的程序代码;
80.悬架控制器,用于执行上述实施例的车辆底盘悬架调高的分步协同控制策略中处理过程对应的程序代码。
81.悬架控制器可以采用dsp(digital signal processor)数字信号处理器、 fpga(field
‑
programmable gate array)现场可编程门阵列、mcu (microcontroller unit)系统板、soc(system on a chip)系统板或包括i/o 的plc(programmable logic controller)最小系统。
82.本发明一实施例车辆底盘悬架调高的分步协同控制系统如图3所示。在图3中,本实施例包括:
83.控制建立装置,用于根据升降指令建立车辆底盘悬架调高迭代过程;
84.状态保持装置,用于当在调高迭代过程中达到预期高度时,维持车辆底盘悬架高度。
85.如图3所示,在本发明一实施例中,控制建立装置包括:
86.升高指令识别模块,用于根据升降指令确定升高的高度目标值;
87.第一信号采集模块,用于通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
88.升序建立模块,用于根据弹性支撑点的当前高度形成各弹性支撑点升序调整顺序;
89.升高调整模块,用于在升序调整顺序中控制最低弹性支撑点升高一个基本步长;
90.第一迭代控制模块,用于当所有弹性支撑点未达到高度目标值时,进行升高迭代。
91.如图3所示,在本发明一实施例中,控制建立装置还包括:
92.降低指令识别模块,用于根据升降指令确定降低的高度目标值;
93.第二信号采集模块,用于通过高度传感器获取底盘右前、左前、右后和左后弹性支撑点的当前高度;
94.降序建立模块,用于根据弹性支撑点的当前高度形成各弹性支撑点降序调整顺序;
95.降低调整模块,用于在降序调整顺序中控制最高弹性支撑点降低一个基本步长;
96.第二迭代控制模块,用于当所有支撑点未达到高度目标值时,进行降低迭代。
97.如图3所示,在本发明一实施例中,控制建立装置还包括:
98.调整时长优化装置,用于根据迭代次数,一个基本步长的调整时长按预置等差比例降低。
99.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。