:
1.本实用新型涉及赛车技术领域,尤其涉及一种适用于无人驾驶方程式赛车的转向切换系统。
背景技术:
2.近年技术突飞猛进的发展,除了高新技术的发展,也有更多的技术越来越贴合民生,以求更加便利的服务于人们的日常生活,而在其中各个告诉发展的新兴领域中,智能驾驶技术尤为突出,势必是未来发展的趋势。
3.随着智能驾驶技术的发展,全国大学生无人方程式赛车比赛也悄然兴起。而对于目前的无人方程式赛车转向系统而言,大多数都采用转向电机来代替人力作为无人驾驶状态下转向系统扭矩的输入,再通过一些传动装置来带动转向轮的转动,从而实现无人转向。但当驾驶状态转换成有人状态时,转向电机的转动阻力会加重驾驶员的转向负担,使有人转向变得非常沉重。
4.专利cn111267942a和专利cn209987988u分别公开了两种通过设计齿轮分离机构来解除有人状态下电机与转向机构的连接,进而解决有人驾驶状态时,由于电机转动阻力造成的转向过重的问题的方案;但是在实际运用过程中,由于转向系统零件之间存在间隙以及在无人方程式赛车行驶过程中产生的扰动,会导致齿轮在分离之后,往往无法再次顺利啮合,这将影响到有人与无人两种转向状态切换的正常进行。
技术实现要素:
5.本技术的目的在于提供一种适用于无人驾驶方程式赛车的转向切换系统,在保证了有人和无人两种驾驶状态下时赛车的转向功能的情况下,还解决了转向电机转动阻力对驾驶员造成的转向过重的问题;另外,本技术提供的方案相对于其它方案而言,未采用齿轮分离装置,不会面临有人驾驶状态向无人驾驶状态切换时,齿轮无法啮合而导致两种驾驶状态无法顺利切换的问题。
6.本发明为实现上述目的采用如下技术方案:
7.一种适用于无人驾驶方程式赛车的转向切换系统,主要包括电机离合分离组件、锥齿轮组组件和转角监测组件;其特征在于:所述的电机离合分离组件包括直流伺服电机、行星齿轮减速器、电磁离合器基座、电磁离合器摩擦片、连轴和连接盘;所述直流伺服电机输出轴与行星齿轮减速器输入端通过键连接传动;所述连轴一端与行星齿轮减速器输出轴通过键和连轴外圆柱面上的螺纹孔上的顶丝连接传动,另一端则安装在连接盘与电磁离合器摩擦片的安装间隙中;连接盘一端与电磁离合器摩擦片通过螺栓固定连接,另一端则与锥齿轮轴相连,并用顶丝固定。
8.所述锥齿轮组组件包括锥齿轮轴、锥齿轮、锥齿轮盒、直齿轮轴、锥齿轮盒盖;所述锥齿轮轴与锥齿轮相啮合,锥齿轮通过滑键与直齿轮轴相连接;锥齿轮盒和锥齿轮盒盖配合后通过螺栓固定。
9.所述锥齿轮轴与锥齿轮盒盖之间安装有滚动轴承。
10.所述连接盘与电磁离合器摩擦片相连接的那一面开有向内的圆形凹槽;连轴在连接盘与电磁离合器摩擦片之间的安装配合为间隙配合。
11.所述连轴上套有挡圈。
12.所述转角监测组件包括转角传感器、快拆轴、快拆轴立柱和固定装置;所述转角传感器安装于方向盘快拆轴上,并通过方向盘快拆轴立柱上的固定装置固定。
13.与已有技术相比,本发明有益效果体现在:
14.1、采用了电磁离合器作为主体结构来实现有人与无人两种转向状态的切换,可以有效地防止电机的转动阻力给有人驾驶造成额外的负担;同时相对于齿轮分离等机构而言,它的切换工作更加可靠,切换速度也更快。
15.2、电磁离合器的额定工作扭矩有限,当输入扭矩大于额定工作扭矩时,电磁离合器摩擦片将发生打滑,这可以对整个电机进行过载保护。防止无人驾驶状态时,转向工作异常,转向达到极限位置后,电机依然持续输出扭矩而过载烧坏。
附图说明:
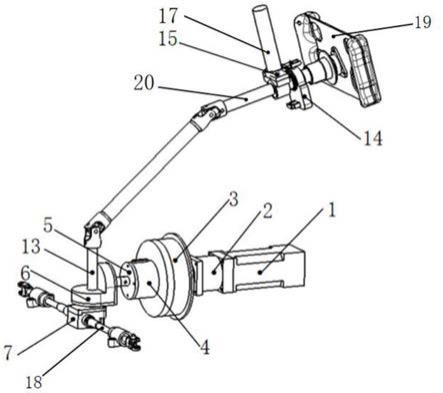
16.图1为本专利转向系统总成结构示意图;
17.图2为本专利转向系统中锥齿轮组示意图;
18.图3为本专利转向系统中连轴安装位置示意图;
19.图4为本专利转向系统中挡圈的安装位置示意图;
20.图5为本专利转向系统中连轴结构示意图;
21.图中编号说明:1
‑
直流伺服电机、2
‑
行星齿轮减速器、3
‑
电磁离合器基座、4
‑
电磁离合器摩擦片、5
‑
连接盘、6
‑
锥齿轮盒、7
‑
转向机、8
‑
深沟球轴承、9
‑
锥齿轮、10
‑
锥齿轮轴、11
‑
连轴、12
‑
挡圈、13
‑
直齿轮轴、14
‑
转角传感器、15
‑
固定装置、16
‑
锥齿轮盒盖、17
‑
快拆轴立柱、 18
‑
齿条、19
‑
方向盘、20
‑
快拆轴。
具体实施方式:
22.下面将结合本发明实施例中的附图,对本实例进行更清晰、完整的描述,本实用新型的工作原理如下:
23.1、无人驾驶状态当处于无人驾驶状态时,在接收到转角信号后,直流伺服电机1将转动一定的角度,经行星齿轮减速器2减速增扭后,带动连轴11转动,而连轴11将带动电磁离合器基座3转动一定的角度。连轴11适当位置处安装有挡圈12,保障电磁离合器基座3和电磁离合器摩擦片4的安装间隙。同时电磁离合器通电,电磁离合器基座3和电磁离合器摩擦片4吸合,二者之间将产生较大的摩擦力,从而带动电磁离合器摩擦片4转动一定角度。再经过连接盘5带动锥齿轮轴10转动,锥齿轮轴10与锥齿轮盒盖16的孔轴配合间安装有深沟球轴承8。锥齿轮轴10在锥齿轮盒6中与锥齿轮9啮合,从而带动锥齿轮9转动。直齿轮轴13通过键与锥齿轮9固定连接,也会发生转动。直齿轮轴13与转向机7中的齿条 18的啮合,齿条18将直齿轮轴13的转动转换为左右移动,从而实现转向。与此同时,实际转向角度信号也会被快拆轴20上的转角传感器14采集,转角传感器14通过方向盘快拆轴立柱17上的固定装置15固定,便于实现对转向角度的闭环控制。
24.2、有人驾驶状态当处于有人驾驶状态时,车手通过方向盘19带动快拆轴20转动,再经一系列零件和机构传动,从而带动直齿轮轴13转动,这时,直齿轮轴13一方面与转向机7 中的齿条18相啮合,并带动齿条18左右移动,从而实现转向;另一方面通过键与锥齿轮9 固定连接,从而带动锥齿轮9转动,再经锥齿轮轴10、连接盘5传动,带动电磁离合器摩擦片4转动。但是此时电磁离合器断电,电磁离合器基座3和电磁离合器摩擦片4断开,车手转动方向盘19时产生的力矩只能传递到电磁离合器摩擦片4上,不会再经向电磁离合器基座 3中传递到行星齿轮减速器2和直流伺服电机1中,行星齿轮减速器2和直流伺服电机1 的转动阻力也就不会对车手造成额外的负担,从而保障了无人方程式赛车有人驾驶与无人驾驶两种状态下转向功能的正常工作。
25.上述实施例只为说明本实用新型发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型发明的内容并据以实施,并不能以此限制本实用新型发明的保护范围。凡根据本实用新型发明的技术方案所作的等效变化或修饰,都应涵盖在本实用新型发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

