1.本技术涉及汽车技术领域,特别是涉及一种车辆防碰撞控制装置。
背景技术:
2.随着经济的发展,汽车得到了进一步的普及,成为日常生活中不可或缺的交通工具。随着汽车数量的急剧增加,路面交通日渐复杂,交通事故频发。在道路交通事故中,车辆碰撞所造成的交通事故也越来越多,从而给人们造成了巨大的人身伤害和/或财产损失,引起了社会各界的广泛关注。
3.目前汽车防碰撞控制方法有两大类,一类是基于雷达,但是雷达无法识别物体,并且所测距离不能太远,不能根据物体的行为做不同的控制。另一类是基于视觉,汽车厂家基于安装在汽车前挡风玻璃的单目或者双目摄像头进行防碰撞预警,但是这样只能预警前方车辆和行人的碰撞,对于车辆左右侧的预警无能为力。
4.前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现要素:
5.本技术的目的在于提供一种车辆防碰撞控制装置,能够防止车辆碰撞事故的发生,提高行车安全性。
6.为达到上述目的,本技术的技术方案是这样实现的:
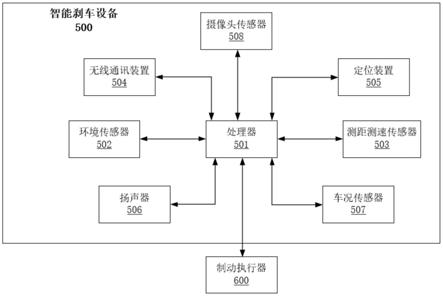
7.第一方面,本技术实施例提供了一种车辆防碰撞控制装置,包括:获取车外周围环境信息的采集模块、获取车辆行车信息的车载传感器、根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施的控制器、显示全景影像的显示屏,所述控制器与采集模块、车载传感器和显示屏相连。
8.作为其中一种实施方式,所述采集模块包括鱼眼摄像头。
9.作为其中一种实施方式,所述采集模块安装在车辆前方位置、车辆后方位置、车辆左后视镜位置和车辆右后视镜位置处。
10.作为其中一种实施方式,在车辆前方位置、车辆后方位置、车辆左后视镜和车辆右后视镜位置处分别安装一个鱼眼摄像头,车外周围环境信息包括静态图像或者动态视频中的至少一种。
11.作为其中一种实施方式,所述车载传感器为gps导航系统、方向盘转角传感器、陀螺仪传感器、速度传感器中的至少一个。
12.作为其中一种实施方式,所述控制器为车辆的电子控制单元。
13.作为其中一种实施方式,所述警示装置为蜂鸣器或声光警示器中的至少一种。
14.本技术实施例提供的技术方案带来的有益效果是:
15.本技术实施例提供的车辆防碰撞控制装置,通过采集模块获取车外周围环境信息,并将获取的车外周围环境信息提供给控制器;车载传感器获取车辆行车信息,并将获取的行车信息提供给控制器;所述控制器将车外周围环境信息进行处理以合成全景影像,并
将全景影像发送给显示屏进行显示,还根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物;若判断结果为存在障碍物,则根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,以防止碰撞障碍物,从而可以结合环视视觉数据和深度学习识别功能,自动准确识别障碍物,并给出相应的防碰撞处理措施,防止车辆与障碍物碰撞,大大提高了行车安全性。
附图说明
16.图1为本技术实施例提供的车辆防碰撞控制装置的框图;
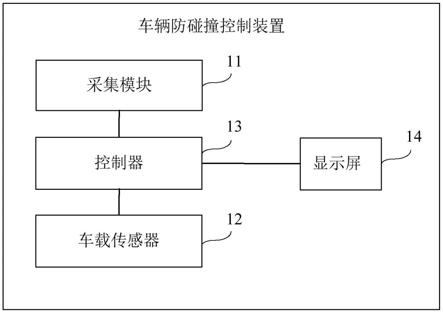
17.图2为车辆防碰撞控制装置结构示意图;
18.图3为本技术实施例提供的车辆防碰撞控制方法的流程示意图。
具体实施方式
19.以下结合说明书附图及具体实施例对本技术技术方案做进一步的详细阐述。除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
20.图1为本技术实施例提供的车辆防碰撞控制装置的框图。图2为车辆防碰撞控制装置结构示意图。所述车辆防碰撞控制装置能够防止车辆碰撞事故的发生,提高行车安全性。请参考图1和图2,本实施例的车辆防碰撞控制装置包括:采集模块11、车载传感器12、控制器13、显示屏14。
21.具体地,采集模块11与控制器13相连,用于获取车外周围环境信息,并将获取的车外周围环境信息提供给控制器13。
22.这里,采集模块11可以包括鱼眼摄像头,采集模块11可以安装在车辆前方位置、车辆后方位置、车辆左后视镜位置和车辆右后视镜位置处,例如可以在车辆前方位置、车辆后方位置、车辆左后视镜和车辆右后视镜位置处分别安装一个鱼眼摄像头,用于获取车外四周影像。车外周围环境信息可以是周围环境各种物体的信息,包括静态图像或者动态视频中的至少一种。
23.车载传感器12与控制器13相连,用于获取车辆行车信息,并将获取的行车信息提供给控制器13。
24.其中,车载传感器12可以为gps导航系统、方向盘转角传感器、陀螺仪传感器、速度传感器等中的至少一个,上述行车信息可以包括车辆的行驶方向、车速、档位、转向信号、方向盘转角等信息中的至少一个。车辆的行驶方向和车速可以从车辆上安装的方向传感器中获得,例如gps导航系统、陀螺仪传感器、速度传感器等中的至少一个。档位、转向信号、车辆方向盘转角可以分别从车辆上安装的档位传感器、转向检测传感器、方向盘转角传感器中获得。
25.控制器13与采集模块11、车载传感器12和显示屏14相连,用于将车外周围环境信息进行处理(例如合成处理)以合成全景影像,并将全景影像发送给显示屏13进行显示,还根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物,若判断结果为存在障碍物,则根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,以防
止碰撞障碍物。
26.其中,控制器13可以为车辆的电子控制单元ecu(electronic control unit),又称“行车电脑”。障碍物为阻碍车辆行驶的任何物体,例如动物、人、石头等物体、机动车、非机动车等中的至少一种,障碍物信息可以包括障碍物的类型、障碍物运动速度、障碍物运动位置、障碍物运动方向、障碍物大小等信息中的至少一种,障碍物的类型可以包括固定障碍物、运动障碍物等类型。控制器13可以处理四个摄像头获取的图像以合成全景影像,并将全景影像显示在车辆中控台的显示屏14上,供驾驶员观看。
27.这里,控制器13若判断结果为不存在障碍物,则继续进行判断。控制器13根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物,即判断车外周围环境是否有影响行驶的障碍物,例如车外周围是否有车辆介入、是否有动物、行人突然出现等情况,这样通过深度学习识别四个摄像头获取的图像中的物体,从而为防碰撞预警功能做准备。例如,控制器13通过深度学习识别后,可以识别前摄像头获取的图像中的前方车辆、自行车、行人等,识别后摄像头获取的图像中的后方车辆、自行车、行人等,识别左摄像头获取的图像中的车辆、电动车、自行车、行人等,识别右摄像头获取的图像中的车辆、自行车、行人等。
28.优选地,控制器13根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物,具体可以包括:控制器13还用于根据车外周围环境信息进行深度学习识别,得到车外周围环境信息中的离车辆一定距离内的障碍物信息,若离车辆一定距离内的障碍物信息与物体特征库中信息相匹配,则判断出存在阻碍车辆行驶的障碍物,反之,则判断不存在阻碍车辆行驶的障碍物。物体特征库可以预先进行建立,其内可以存储障碍物各种特征信息。
29.优选地,控制器13根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,包括:控制器13还用于判断若本车即将碰撞前方障碍物,控制器13通过can网络发送刹车信号给车辆刹车单元,使车辆进行刹车,以避免本车碰撞前方车辆或者行人等,控制器13判断若后方障碍物即将碰撞本车或者本车车身即将左右剐蹭周围障碍物,控制器13通过can网络发送报警信号给车辆警示装置,例如警示装置为蜂鸣器或声光警示器中的至少一种,使得警示装置报警,例如蜂鸣器或声光警示器报警,以提醒驾驶人即将到来的碰撞剐蹭危险,辅助驾驶人做出避险。
30.这样,控制器13可以根据深度学习识别的不同障碍物信息以及车辆的行车信息,给出不同的防碰撞措施,判断若本车即将追尾前方车辆或者本车即将碰撞前方行人等,控制器13通过can网络发送刹车信号给车辆刹车单元,使得车辆进行刹车停止下来,避免本车碰撞前方车辆或者行人等,控制器13判断若后方车辆即将碰撞本车信号或者本车车身即将左右剐蹭周围自行车、电动车、车辆等,控制器13通过can网络发送报警信号给车辆警示装置,例如蜂鸣器、声光报警器等,使得警示装置报警,提醒驾驶人即将到来的碰撞剐蹭危险,辅助驾驶人做出避险。优选地,若判断没有任何碰撞风险,则继续进行判断。本技术是基于360度环视的视觉预警方案,具有车辆前后左右四个方向的全方位预警能力,而且使用深度学习技术识别不同物体,能够准确识别行人,自行车,电动车,摩托车,汽车等物体,给出物体行为预测,然后根据不同情况做出不同的车辆控制,对于防止车辆追尾,防止碰撞行人,防止转向情况下与自行车、电单车、汽车剐蹭有良好效果,大大提高了行车的安全性。
31.综上所述,本技术实施例提供的车辆防碰撞控制装置,通过采集模块获取车外周围环境信息,并将获取的车外周围环境信息提供给控制器;车载传感器获取车辆行车信息,并将获取的行车信息提供给控制器;所述控制器将车外周围环境信息进行处理以合成全景影像,并将全景影像发送给显示屏进行显示,还根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物;若判断结果为存在障碍物,则根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,以防止碰撞障碍物,从而可以结合环视视觉数据和深度学习识别功能,自动准确识别障碍物,并给出相应的防碰撞处理措施,防止车辆与障碍物碰撞,大大提高了行车安全性。
32.以下为本技术的方法实施例,在方法实施例中未详尽描述的细节,可以参考上述对应的装置实施例。
33.图3为本技术实施例提供的车辆防碰撞控制方法的流程示意图。请参考图3,该车辆防碰撞控制方法应用于车辆防碰撞控制装置,该车辆防碰撞控制装置可以采用软件和/或硬件的方式来实现,本实施例中所述车辆防碰撞控制方法包括以下步骤:
34.步骤s301,采集模块获取车外周围环境信息,并将获取的车外周围环境信息提供给控制器,车载传感器获取车辆行车信息,并将获取的行车信息提供给控制器。
35.步骤s302,控制器将车外周围环境信息进行处理以合成全景影像,并将全景影像发送给显示屏进行显示,还根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物,若判断结果为存在障碍物,则进行步骤s303,优选地,若判断结果为不存在障碍物,则继续进行步骤s301;
36.步骤s303,根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,以防止碰撞障碍物;
37.其中,步骤s302中,根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物,具体可以包括:
38.控制器根据车外周围环境信息进行深度学习识别,得到车外周围环境信息中的离车辆一定距离内的障碍物信息,若离车辆一定距离内的障碍物信息与物体特征库中信息相匹配,则判断出存在阻碍车辆行驶的障碍物。
39.其中,步骤s303中,根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,以防止碰撞障碍物,具体可以包括:
40.控制器判断若本车即将碰撞前方障碍物,控制器通过can网络发送刹车信号给车辆刹车单元,使车辆进行刹车,控制器判断若后方障碍物即将碰撞本车或者本车车身即将左右剐蹭周围障碍物,控制器通过can网络发送报警信号给车辆警示装置,使得警示装置报警。优选地,若判断没有即将碰撞任何障碍物,则继续进行步骤s301。
41.其中,所述采集模块包括鱼眼摄像头。
42.其中,所述采集模块安装在车辆前方位置、车辆后方位置、车辆左后视镜位置和车辆右后视镜位置处。
43.其中,在车辆前方位置、车辆后方位置、车辆左后视镜和车辆右后视镜位置处分别安装一个鱼眼摄像头,车外周围环境信息包括静态图像或者动态视频中的至少一种。
44.其中,所述车载传感器为gps导航系统、方向盘转角传感器、陀螺仪传感器、速度传感器中的至少一个,所述控制器为车辆的电子控制单元。
45.其中,所述警示装置为蜂鸣器或声光警示器中的至少一种。
46.综上所述,本技术实施例提供的车辆防碰撞控制方法,通过采集模块获取车外周围环境信息,并将获取的车外周围环境信息提供给控制器;车载传感器获取车辆行车信息,并将获取的行车信息提供给控制器;所述控制器将车外周围环境信息进行处理以合成全景影像,并将全景影像发送给显示屏进行显示,还根据车外周围环境信息进行深度学习识别后,判断是否存在阻碍车辆行驶的障碍物;若判断结果为存在障碍物,则根据车辆行车信息、障碍物信息给出相应的防碰撞处理措施,以防止碰撞障碍物,从而可以结合环视视觉数据和深度学习识别功能,自动准确识别障碍物,并给出相应的防碰撞处理措施,防止车辆与障碍物碰撞,大大提高了行车安全性。
47.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
48.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素,此外,本技术不同实施例中具有同样命名的部件、特征、要素可能具有相同含义,也可能具有不同含义,其具体含义需以其在该具体实施例中的解释或者进一步结合该具体实施例中上下文进行确定。
49.应当理解,尽管在本文可能采用术语第一、第二、第三等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本文范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。取决于语境,如在此所使用的词语"如果"可以被解释成为"在
……
时"或"当
……
时"或"响应于确定"。再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
50.应该理解的是,虽然本技术实施例中的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,其可以以其他的顺序执行。而且,图中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,其执行顺序也不必然是依次进行,而是可以与其他步骤或者其他步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
51.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。