1.本发明涉及液压转向控制领域,具体是一种全液压车辆转向角度一致性的控制方法。
背景技术:
2.随着时代进步与技术发展,工程机械与特种车辆等的应用领域越来越广泛,其应用环境也愈发复杂,人们对于此类机械与车辆的工作性能要求逐渐上升,尤其注重驾驶安全性,舒适性以及运作效率,同时对于液压转向能力及其准确性的要求随之提高。
3.对于中、大型式工程车辆或特种车辆,大都采用液压转向布置方案,大多数车辆转向泵动力源来自发动机,这就不可避免地带来一些问题,比如发动机转速提高时,液压泵流量也会提高,在同样方向盘转角输入下,发动机转速越高,车辆转向速度越快,因此车辆在较高速度行驶时,转向比较灵敏,安全系数低,增大了驾驶员的操纵强度。因此需要对不同发动机转速下变量泵排量进行调节,以满足定量马达输出端转速尽可能保持一致。
技术实现要素:
4.本发明针对全液压转向车辆存在转向速度随发动机转速提高而增大的问题,提出了一种全液压转向机械系统的转向速度一致性控制方法,以期能在转向过程中在方向盘转角输入不变的情况下,随着发动机转速的改变,对车辆转向速度进行一致性控制,从而提高行车安全性、降低驾驶员的操纵强度。
5.本发明为达到上述发明目的,采用如下技术方案:
6.本发明一种全液压转向机械系统的转向速度一致性控制方法,所述全液压转向机械系统包括:发动机、电子控制单元ecu、静压传动系统、静压系统排量调节执行机构、转角采集模块、转向集成控制器、主动差速机构及其两侧的履带;
7.所述静压传动系统由变量泵和定量马达组成,变量泵的动力输入轴与发动机通过花键连接,定量马达的动力输出轴与主动差速机构的主动轴通过花键连接;
8.所述转向集成控制器由pwm驱动模块和can总线模块组成;
9.所述静压系统排量调节执行机构由左转排量调节机构和右转排量调节机构组成;
10.发动机输出的动力经过所述静压传动系统传递给所述主动差速机构,从而改变两侧履带的速度差进行转向;其特点在于,所述转向速度一致性的控制方法按照如下步骤进行:
11.步骤1、标定所述静压传动系统的变量泵排量v与pwm驱动模块的pwm占空比dty之间的对应关系,从而得到式(1)所示的关系式:
12.v=f(dty)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
13.式(1)中,f(
·
)表示函数对应关系;
14.步骤2、所述转向集成控制器通过can总线模块获取所述转角采集模块的转角相关信息并进行解析,从而得到车辆的转动方向,并利用式(2)计算相应转角下pwm驱动模块的
pwm占空比dty:
[0015][0016]
式(2)中,sa
cur
为所述转角采集模块当前所采集的车辆转角,sa
max
为所述转角采集模块所采集的最大转角,a为左/右转排量调节机构开始起作用时的最低占空比;dty∈[a,100];
[0017]
步骤3、所述转向集成控制器通过can总线模块采集电子控制单元ecu中发动机的转速信息,从而利用式(3)计算出车辆在一定转角输入下的pwm驱动信号的修正系数,并利用式(4)得到修正后的pwm驱动模块的pwm占空比dty1;
[0018]
c=n
e0
/n
e1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0019]
式(3)中,n
e0
为发动机的怠速转速,n
e1
为高于发动机怠速时的任一转速;
[0020]
dty1=k
×
c(dty0‑
a) a b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0021]
式(4)中,dty0为怠速转速下,任一转角下pwm驱动模块的pwm占空比;k和b为两个误差处理系数;
[0022]
步骤4、所述静压系统排量调节执行机构根据所述转向集成控制器发出的修正后的pwm驱动信号,利用所述左转排量调节机构和右转排量调节机构对所述变量泵进行左转排量调节或者右转排量调节,从而改变两侧履带的速度差,以实现转向速度的一致性控制。
[0023]
与已有技术相比,本发明的有益效果体现在:
[0024]
1、本发明将发动转速作为输入量,依据发动机转速的不同,计算出变量泵流量修正系数,调节pwm驱动模块的pwm占空比,改变了变量泵得排量,从而改变了车辆转向速度速度与怠速时保持基本一致,避免了高速时转向灵敏得问题,提高了操纵安全性,降低了驾驶员操纵强度。
[0025]
2、作为工程应用,本发明在方向盘转角输入不变,发动机转速提高时,为了保证车辆转向速度的一致性,降低转向集成控制器计算的时间复杂度,用一种线性计算方法替换复杂的非线性计算,同时增加了误差处理系数k和b,从而提高了转向控制的实时性。
附图说明
[0026]
图1为本发明实施中的控制系统及转向结构布置方案图。
[0027]
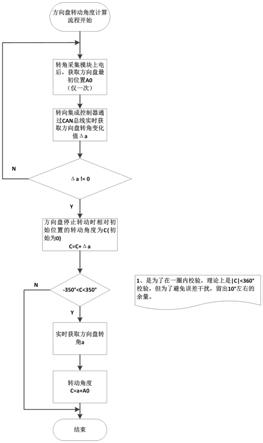
图2为本发明实施中方向盘转动角度计算流程。
具体实施方式
[0028]
本实施例中,一种全液压转向机械系统的转向速度一致性控制方法,其中,如图1所示,全液压转向机械系统由发动机、电子控制单元ecu、静压传动系统、静压系统排量调节执行机构、转角采集模块、转向集成控制器、主动差速机构和两侧履带组成;
[0029]
静压传动系统由变量泵和定量马达组成,变量泵的动力输入轴与发动机通过花键连接,定量马达的动力输出轴与主动差速机构的主动轴通过花键连接;
[0030]
转向集成控制器由pwm驱动模块和can总线模块组成;
[0031]
静压系统排量调节执行机构由左转排量调节机构和右转排量调节机构组成;发动机输出的动力经过静压传动系统传递给主动差速机构,从而改变两侧履带的速差进行转
向;
[0032]
改变静压系统排量调节执行机构的排量改变转向速度大小。转角采集模块用来采集方向盘转动角度,并通过转向集成控制器对转角采集模块发来的原始数据进行解析计算,得到真实的转角信息;方向盘的转动角度为零时,变量泵的排量为零,此时变量泵的流量也为零,即定量马达锁止,两侧履带速度一致,车辆直线行驶;当方向盘向左转动时,转向集成控制器计算出此时方向盘转动角度,并将方向盘转动角度与pwm驱动模块的pwm占空比对应起来,计算出相应的pwm占空比,进而去控制左转排量调节机构;同理,右转时也是类似控制;
[0033]
该转向响应角度一致性的控制方法按照如下步骤进行:
[0034]
步骤1、标定静压传动系统变量泵排量v与pwm驱动模块的pwm占空比dty之间的对应关系,单独编写一套测试程序,通过给静压系统排量调节执行机构输入不同的占空比的pwm,记录该占空比下变量泵的排量,将占空比和变量泵的排量进行数据拟合,得到变量泵排量与pwm占空比之间的曲线;即得到式(1)所示的关系式:
[0035]
v=f(dty)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0036]
式(1)中,f(
·
)表示函数对应关系;
[0037]
步骤2、转向集成控制器通过can总线获取转角采集模块的转角相关信息,转向集成控制器中的can总线收发模块与转角采集模块进行通信,获取方向盘转动角度;转向集成控制器解析转角相关信息,获取车辆方向盘的转动方向,同时结合方向盘转动方向信息计算出方向盘的转动角度,具体计算方法如图2所示:
[0038]
第一步:转角采集模块上电后,转向集成控制器获取方向盘的初始位置a0,并且该初始位置在转角采集模块上电到断电之间仅获取一次,作为转角计算的参考基准;
[0039]
第二步:转向集成控制器从转角采集模块实时获取方向盘转角当前时刻t1与上一时刻t0的转角变化值δa;
[0040]
第三步:判断δa是否为零,当不为零时,计算出当前相对初始位置的方向盘的转动角度c=c δa,方向盘的转动角度c初值为0;
[0041]
第四步:判断方向盘的转动角度是否超过一圈(这里留出10
°
的余量),如果在一圈以内,进行校验,用公式c=a a0得到一圈以内方向盘的转动角度,否则,直接用第三步计算出的方向盘的转动角度;
[0042]
并根据此时方向盘转动角度利用式(2)计算出相应转角下pwm驱动模块的pwm占空比dty:
[0043][0044]
式(2)中,sa
cur
为所述转角采集模块当前所采集的车辆转角,sa
max
为所述转角采集模块所采集的最大转角,a为左/右转排量调节机构开始起作用时的最低占空比;dty∈[a,100];
[0045]
步骤3、转向集成控制器通过can总线模块采集发动机电子控制单元ecu中发动机的转速信息,从而利用式(3)计算出车辆在一定转角输入下的pwm驱动信号的修正系数,并利用式(4)得到修正后的pwm驱动模块的pwm占空比dty1;
[0046]
c=n
e0
/n
e1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0047]
式(3)中,n
e0
为发动机的怠速转速,n
e1
为高于发动机怠速时的任一转速;
[0048]
dty1=k
×
c(dty0‑
a) a b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0049]
式(4)中,dty0为怠速转速下,任一转角下pwm驱动模块的pwm占空比;k和b为两个误差处理系数;
[0050]
步骤4、静压系统排量调节执行机构根据转向集成控制器发出的修正后的pwm驱动信号,利用左转排量调节机构和右转排量调节机构对所述变量泵进行左转排量调节或者右转排量调节,从而改变两侧履带的速度差,以实现转向速度的一致性控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

